Изобретение относится к машиностроению и может быть использовано во всех отраслях народного хозяйств для соединения звеньев манипуляторо
Цель изобретения - улучшение динмических характеристик шарнира.
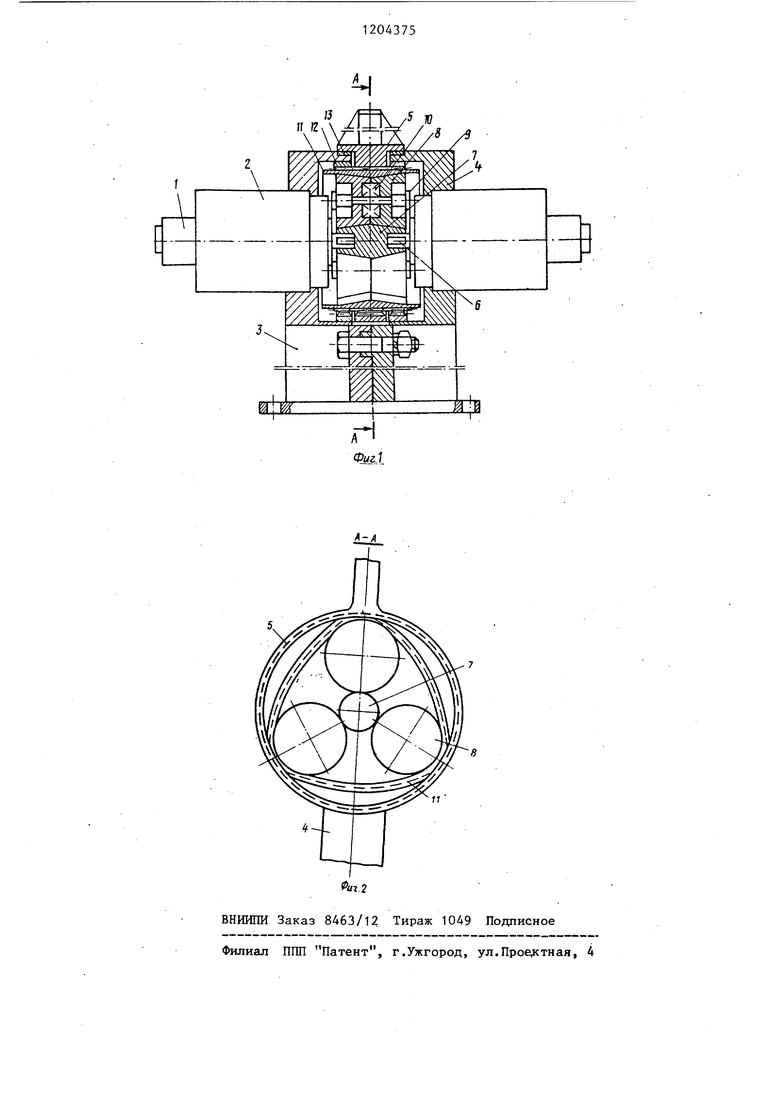
На фиг. 1 изображен шарнир манипулятора, разрез; на фиг. 2 - разрез А-А на фиг. 1.
Шарнир манипулятора имеет средства обратной связи по нагрузке 1, два электродвигателя 2, между которыми расположена механическая часть с ведущим звеном 3 с корпусом 4 и ведомым звеном 5. Двигатели 2 установлены в полукорпусе 4 ведущего звена 3, а их валы 6 связаны центральным роликом 7, выполненным в виде конической бочки. Три составных сателлита 8 в виде обратных конических бочек объединены водилом 9 и подшипниковь1ми узлами 10 в еди- ньш трехволновый генератор волн деформации, которьй воздействует на гибкое центральное зубчатое колесо-звено 11. Наружная поверхность колеса 11 имеет зубчатый венец с числом зубьев 2| , а жесткие колеса 12 и звено 5 - зубчатые венцы с числом зубьев соответственно 2 и . Ведомое звено шарнира опирается на подшипниковую опору 13 из фено- древослоя.
Шарнир выполнен с соотношением зубьев 1 2 и 2 ( + 3. Поэтому гибкое колесо 11 совершает лиш колебательное движение, оставаясь неподвижным в плоскости вращения шарнира.
Возможно изготовление шарнира с целью получения меньших скоростей при другом соотношении чисел зубьев например 3 ( - Z) О и 2, - - , 3.
Шарнир работает следующим образом.
Электродвигательное устройство со средствами обратной связи по наг
рузке 1, которые могут быть выполнены в виде специальных датчиков нагрузки (моментомеров) или в форме датчиков косвенного замера нагрузки
(тахогенераторов, вращающихся трансформаторов) , при подаче электрического управляющего сигнала на него приводит во вращение центральный ролик 7 (фиг. 1 и 2). Ролик 7 имеет
фрикционную связь, например, с тремя составными сателлитами 8 в трех точках, и благодаря этому вращает их. За счет разности длин обкатки сателлиты, связанные водилом, воздействуют в трех зонах на гибкое центральное корончатое зубчатое колесо 11, создавая в нем три волны деформации. Волны деформации зубчатого колеса 11 совместно с жестким зубчатым колесом
ведомого звена. 5 образуют известный волновой эффект, за счет которого ведомое звено совершает вращательное движение.
Для передачи вращающего момента
механическая цепь шарнира замкнута на корпус (ведущее звено 3 и корпус 4) волновой, муфтой с жесткими зубчатыми колесами 12 с числом зубьев, равным числу зубьев гибкого колеса 11. Поэтому при вращении генератора волн в виде трех сателлитов 8, объединенных водилом 9, за счет наличия муфтового зацепления гибкого колеса 11 с корпусом 4 ведущего звена 3
гибкое звено не вращается относительно корпуса, а лишь совершает волнообразные движения. Разность числа зубьев звеньев 11 и 5, равная трем, позволяет ведомому звену совершать
вращательное движение с малой скоростью.
Предлагаемый шарнир предназначен для систем робототехники, которые, как правило,, работают в напряженных динамических условиях. Улучшение динамических характеристик повьш1ает экономичность манипулятора.
WvXfty/%
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| ВОЛНОВАЯ ДВУХСТОРОННЯЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2022 |
|
RU2792308C1 |
| Шарнир манипулятора | 1987 |
|
SU1516350A1 |
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Шарнир манипулятора | 1988 |
|
SU1535717A1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| Приводной сферический шарнир | 1989 |
|
SU1646863A1 |
1. Шарнир манипулятора, соеди- нянидий два звена манипулятора, содержащий приводной двигатель, размещенный на первом звене манипулятора и кинематически связанный посредством волнового редуктора с вторым звеном манипулятора, причем волновой редуктор выполнен в виде гибкого зубчатого колеса, генератора волн, связанного с приводным двигателем,и трех жестких зубчатых колес два из которых закреплены на первом звене манипулятора,а третье закреплено на втором звене мани.пулятора и размещено между жесткими зубчатыми колесами, закрепленными на первом звене манипулятора, о т- личающийся тем, что, с целью улучшения динамических характеристик, шарнир снабжен двумя двигателями, размещенными соосно, генератор волн выполнен в виде фрикционной передачи, включающей централь- ньй ролик, жестко связанный с выходными валами приводных двигателей, водило с закрепленными на нем сателлитами, находящимися в контакте с центральным роликом и с гибким зубчатым колесом, причем фрикционные поверхности сателлитов и гибкого зубчатого колеса выполнены с профилем, соответствующим профилю центрального ролика. 2.Шарнир по п. 1,отлича- ю щ и и с я тем, что наружный профиль центрального ролика выполнен в виде двух усеченных конических поверхностей с разнонаправленными вершинами. 3.Шарнир по п. 1, отличающийся тем, что наружный профиль центрального ролика выполнен в виде поверхности вращения параболы. i (Л § 4; со сд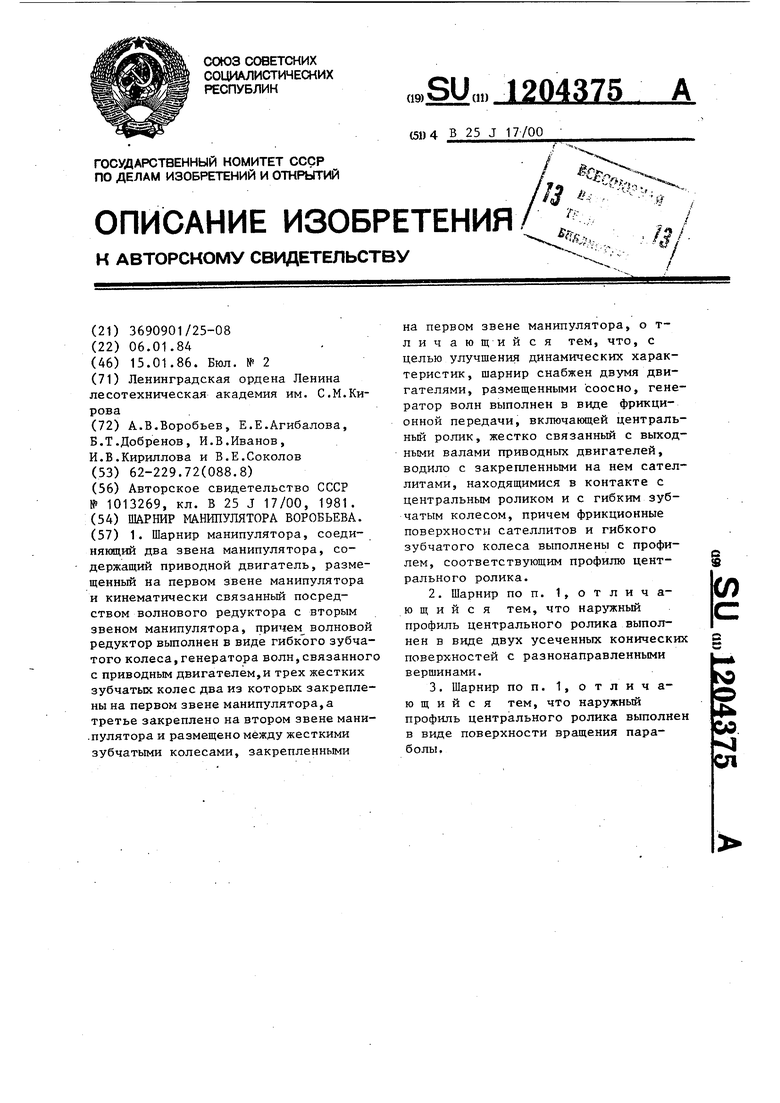
ВНИИПИ Заказ 8463/12 Тираж 1049 Подписное Филиал ППП Патент, г.Ужгород, ул.Проедстная, А
| Шарнир соединения звеньев манипулятора | 1981 |
|
SU1013269A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
