00 ю
О)
со Изобретение относится к машиностроению, а именно к шарнирам соединения звеньев манипуляторов. Известен шарнир соединения звенье манипулятора, содержагций ось, волновой редуктор, смонтированный на этой оси и связанный с приводом зубчатой передачей 1J. Наличие зубчатой передачи между приводом и редуктором не позволяет Сделать шарнир малых размеров, а так же снизить потери, возникающие при передаче вращающего момента. Извгестен также шарнир соединения звеньев манипулятора, содержащий волновой редуктор, смонтированный на этой оси и связанный с приводом зубчатой передачей. Генератор волн встроен с промежуточными телами качения (роликами) внутрь выходного колеса зубчатой передачи и охватывает гибкое колесо, имеющее внутренний зубчатый венец, . обеспечивая заданную форму деформации. Два жестких колеса с ответными .зубчат да;1|1 ендами встроены в неподвижмое звено, и одно жесткое колесо с ответным зубчатым венцом закреплено неподвижно на оси подвижного звена. От лривода через зубчатую передачу вращение получает генератор волн. Вращение генератора волн вызывает движение по окружности волн деформации гибкого колеса. Вследствие наличия разности зубьев зубчатых венцов гибкого колеса и жесткого, неподвижно закрепленного на оси, жесткое колесо начинает вращаться. Подвижное вено, находящееся с ним на одной Ьси, coBepiaaeT также поворотное движение в плоскости относительно неподвижного звена С. Недостатка1 1И данного шарнира явля ются невысокая точность позициониров ния из-за наличия люфтов в коническо зубчатой передаче,а также из-за больших габаритов и веса за счет размеще ния внутри звена двигателя и наличия конической передачи, что снижает динамические характеристики шарнира. Целью изобретения является уменьшение, массы и повышение точности позиционирования. Указанная цель достигается тем, что в шарнире соединения звеньев манипулятора, содержащем ось, волновой редуктор, смонтированный на оси и связанный с электродвигателем зубчатой передачей, генератор волн волнов го редуктора выполнен в виде кулачка имеющего наружную поверхность, эквидистантную равноскоростной кривой гибкого колеса этого редуктора, и св зан с ротором электродвигателя, кото рый расположен внутри гибкого колеса На фиг.1 изображен шарнир соединения звеньев манипулятора, общий вид; на фиг. 2 - вид А н.а . Шарнир соединяет звенья 1 и 2 манипулятора. На оси 3 шарнира закреплен Гстатор 4 обращенного электродвигателя, например синхронного гистерезисного, и генератор 5 волн деформации, представляющий собой кулачок, имеющий наружную поверхность, эквидистантную равноскоростной кривой.гибкого колеса 6,и являкяцийся одновременно ротором обращенного электродвигателя. На кулачке запрессованы четыре шариковых подшипника 7 с гибкими деформируемыми обоймами. Гибкое, колесо 6 выполнено в виде тонкостенной трубы с внешним зубчатым венцом, имеющим число зубьев 2ч , и в состоянии упругой деформации надето на обоймы гибких подшипников 7.Форма кулачка генератора 5 волн деформации обеспечивает в зоне наибольшей деформации гибкого колеса 6 зацепление зубьев зубчатого венца Z-, на полной их рабочей высоте и в зоне наименьшей деформации полный отвод зубьев зубчатого венца из зацепления с зУбьями жестких зубчатых колес 8, 9 и 10. При этом жесткое зубчатое колесо 9 установлено неподвижно в звене 1 и имеет число зубьев Zg, примем . Жесткие зубчатые колеса 8 и 1() с числом зубьев Z, Z, равным числу зубьев гибкого колеса 6, Z, т.е. установлены неподвижно в звене 2. Принцип работы шарнира манипулятора заключается в следующем. Вращение кулачка (ротора) электродвигателя вызывает движение по окружности волны деформации гибкого колеса 6.- При равных числах зацеплений зубчатых колес и неподвижном жестком колесе 9, встроенном в звено 1, за один оборот кулачка, гибкое колесо б поворачивается относительно жесткого 9 н угол, соответствующий 1„-2 угловых шагов гибкого колеса б в направлении, обратном вращению кулачка. Звено 2, связанное с гибким колесом 6 волновыми зубчатыми передачами Z, Z , и. Z , Z, также поворачивается на такой угол относительно звена 1. При остановленном кулачке (роторе) волновая передача является тормозом, фиксирующим положение звена 2 относительно звена 1 и муф1ой предельного момента при превышении массы манипулируемого объекта предельной. По сравнению с известным предлагаемый шарнир манипулятора имеет меньший вес и габариты за счет отсутствия конической зубчатой передачи и совмещения функций ротора и генератора волн деформации в одном элементе, при этом повышается коэффициент полезного действия. Отсутствие конической зубчатой
31013269
передачи позволяет также уменьшить ет возможность не использовать корпус момент инерции. Размещение обращенно- и подшипниковые щиты электродвигателя, го электродвигателя на оси шарнира да- что также уменьшает вес шарнира.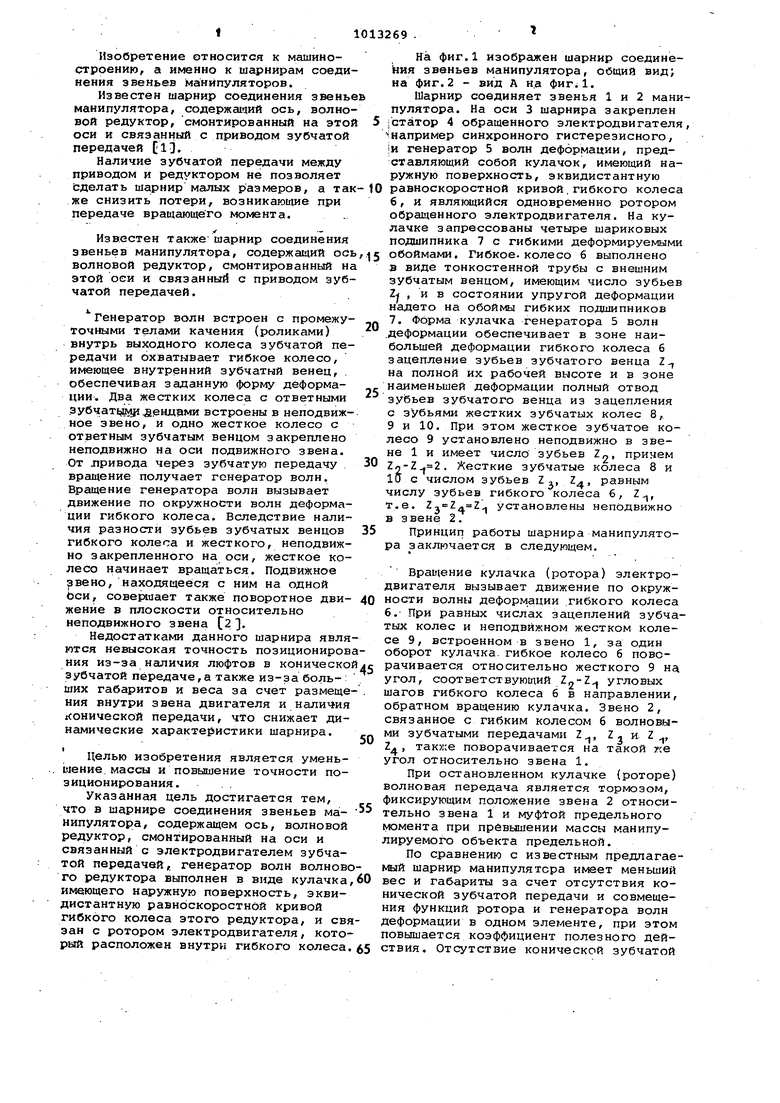

| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир соединения звеньев манипулятора | 1981 |
|
SU1135643A1 |
| Шарнир манипулятора Воробьева | 1984 |
|
SU1204375A1 |
| Шарнир для соединения звеньев манипулятора | 1980 |
|
SU882736A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Мотор-редуктор | 1985 |
|
SU1403269A1 |
| Шарнир манипулятора | 1989 |
|
SU1678607A1 |
| Привод манипулятора | 1982 |
|
SU1144877A1 |
| Шарнир манипулятора Полетучего | 1980 |
|
SU885002A1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |

ШАРНИР-СОЕДИНЕНИЯ ЗВЕНЬЕВ МАНИПУЛЯТОРА, содержащий ось, установленный на этой оси волновой редуктор, связанный с электродвигателем зубчатой передачей, отличающийся тем, что, с целью уменьшения металлоемкости, улучшения динамических характеристик и повышения точности позиционирования, генератор волн волнового редуктора выполнен в виде, кулачка, имеющего наружную поверхность, эквидистантную равноскоростной кривой гибкого колеса этого редуктора, и связан с ротором электродвигателя, который расположен внутри гибкого колеса. 5
Вид А
UB.Z
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АндронниКов G.H., Ворошилов М.С | |||
| , Петров R.A | |||
| Проектирование приводов манипуляторов | |||
| Л., Пашиностроение, 1975, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
