(Л
Ияобрете1 ие относится к подъемно - транспортному оборудованик), а именно к устройствам для управления приводом передвижения тележки с гибкой под- веской груза.
Цель изобретения - повьпчение надежности.
На чертеже изображена функциональная схема устройства,
Устройство для управления приводом передвижения телйжки 1 содержит датчик 2 углового отклонения гибкой подвески груза, датчик 3 ускорения тележки 1 и датчик 4 длины гибкой подвески груза. Датчик 2 подключен через, первый вход блока 5 перемножения сигналов к первому входу блока 6 суммирования и через блок 7 дифференцирования - к первому входу блока 8 перемножения сигналов $ выход которого соединен с вторым входом блока 6. Датчик 3 через блок 9 возведения в квадрат подключен к первому входу блока 10 умножения, второй вход кото рого соединен с выходом интегратора 11, а третий - с выходом блока 12 возведения в квадрат. Выход блока 1 соединен также с первыми входами блоков 13 - 15 умножения.
Выход блока 10 через инвертор 16 связан с первым входом блока 17 суммирования, выход которого через интератор 18 и инвертор 19 соединен с первым входом блока 20 суммирования Выход блока 20 через интегратор 21 связан с первым входом блока 22 умножения, с вторыми входами блоков 5 и 14 и с входом блока 23 возведения в квадрат, выход которого соединен черея второй вход блока 15 с вторым входом блока 17. Датчик 4 через первый вход блока 24 деления связан с лходом блока 2, с первым входом б юка 25 умножения, с третьим входом б.юка 5 и вторым входом блока 8. Второй вход блока 25 связан с первым входом задатчика 26 режима работы, а его выход - с первыми входами блоков 27 и 28 умножения. Второй вход блока 28 соединен с выходом блока 21, а третий вход вместе с вторым входом блока 22 подключен к второму входу задатчика 26.
Выход блока 28 соединен с третьим входом блока 17, четвертый вход которого вместе с вторым входом блока 24 подключен к третьему выходу задатчика 26. Выход блока 2. через первый
вход блока 29 суммирования пoдKJmчeн к входу интегратора 11, выход которого связан с третьими входами блоков 8 и 14, а также с вторым входом блока 27 через инвертор 30.
Выход блока 11 связан через блок 31 возведения в квадрат с вторым входом блока 13, соединенного своим выходом с вторым входом блока 29. Второй вход блока 20 связан с выходом блока 14, а третий - с выходом блока 27. Выходом устройства управления является выход сумматора 6, который связан с управляющим входом привода передвижения тележки 1. Блоки 9-25, 27-31 образуют блок вычисления решения системы трех уравнений.
Устройство работает следующим образом.
Сигнал с датчика 2 поступает в блок 5 непосредственно и в блок 8 поле дифференцирования в блоке 7. В блоке 5 и 8 поступают также сигналы с датчика 4 после их деления в блоке 24. На выходе сумматора 6 необходимо ПОЛУЧИТЬ управляющий сигнал вида
и, -L Р Y - , (I)
где L - длина подвески груза;
М - угол отклонения подвески от
вертикали;
У - скорость изменения угла отклнения; решения уравнения Риккати,
определяемые из системы вида
Р., -2аР„, Р Ь -1 - Pi e V ;и
и
Р,. -PU -Р.г гг ; 2) P.Z -2Р,, Р/, Ъ- где а -gL , Ъ L ; - Ь
g - ускорение свободного падения;
- интенсивность случайных возмущений .
Сигналы Рг2 и р2 , необходимые для формирования управления, подаются на входы блоков 5 и 8 с выходом интеграторов 11 и 21 после решения системы (2) на блоках 9-25, 27-31, соединенных согласно выражению (2).
Значения постоянных коэффициентов, входящих в выражения (1) и (2), формируются при поморди задатчика 26, с первого, второго и третьего выходов которого снимаются соответственно величины -2; 1.
314
Таким обрапом, получаемый на выходе сумматора 6 сигнал упрапления обеспечивает движение тележки 1, на гибкую нодвеску которой воздействуют случайнъш возг-гущения с эффективным гашением колебаний гибкой подвески груза при минимальных энергозатратах на управление, что повышает надежность устройства.
е т е н и я
Формула из обр
Устрой ство для управления приводом передвижения тележки с гибкой подвеской груза, содержащее датчик длины гибкой подвески, сумматор, входы которого соединены с выходами блоков перемножения сигналов, а выход подключен к управляющему входу привода
277
персдви7 ения .теле.хкм, блок дифференцирования, выход которого подсоединен к одному входу одного блока перемно-
жения сигналов, и задатчик режима работы, отличающееся тем, что, с целью повышения надежности, оно снабжено датчиком углового отклонения гибкой подвески, подключенным к входу блока дифференцирования и к одному входу другого блока перемножения сигналов, датчиком ускорения тележки и блоком вычисления решения системы трех уравнений, входы которого соединены с датчиком ускорения теле,(ки, датчиком длины гибкой подвески и задатчиком режима работы, а выходы подключены к другим входам блоков перемножения сигналов.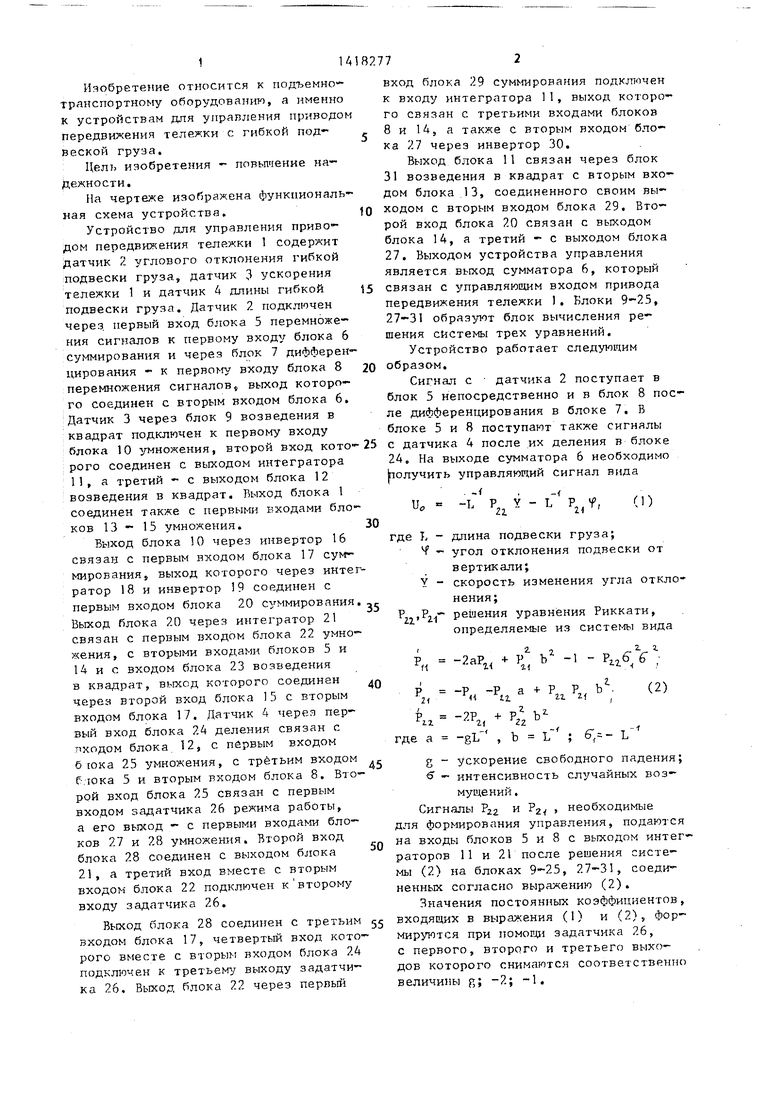
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления приводом передвижения крановой тележки | 1988 |
|
SU1564103A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛИЙ ЗАДАННОГО КЛАССА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2020513C1 |
| Устройство для управления приводом передвижения грузоподъемного средства с гибкой подвеской груза | 1984 |
|
SU1204546A1 |
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |
| Тренажер для подготовки яхтсменов | 1987 |
|
SU1515184A1 |
| Устройство для управления грузоподъемным транспортным средством с гибкой подвеской груза | 1981 |
|
SU1017655A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МЕХАНИЗМОМ ПЕРЕДВИЖЕНИЯ КРАНОВОЙ ТЕЛЕЖКИ | 1989 |
|
RU2013356C1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для управления приводом передвижения тележки с гибкой подвеской груза. Цель изобретения - повышение надежности. Устройство содержит датчик 2 углового отклонения гибкой подвески, датчик 3 ускорения тележки 1 и датчик 4 длины гибкой подвески. Устройство позволяет по сигналам датчиков 2-4 сформировать сигнал управления приводом передвиже- ния тележки 1, позволяюгшй эффективно гасить колебания гибкой подвески при наименьших энергозатратах на управление. 1 ил.
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
