; Изобретение относится к подъемно- т эанспортному оборудованию, а именно к устройствам управления приводами горизонтального перемещения груза, закреп- л энного на гибком подвесе, например, п эиводами перемещения моста и тележки мостового крана, перемещения и поворота пЬртового или башенного крана и т.п.
Целью предлагаемого решения являет- OJ повышение надежности управления за c«jeT эффективного гашения колебаний перемещаемого груза и перехода к управлению скоростью самого груза.
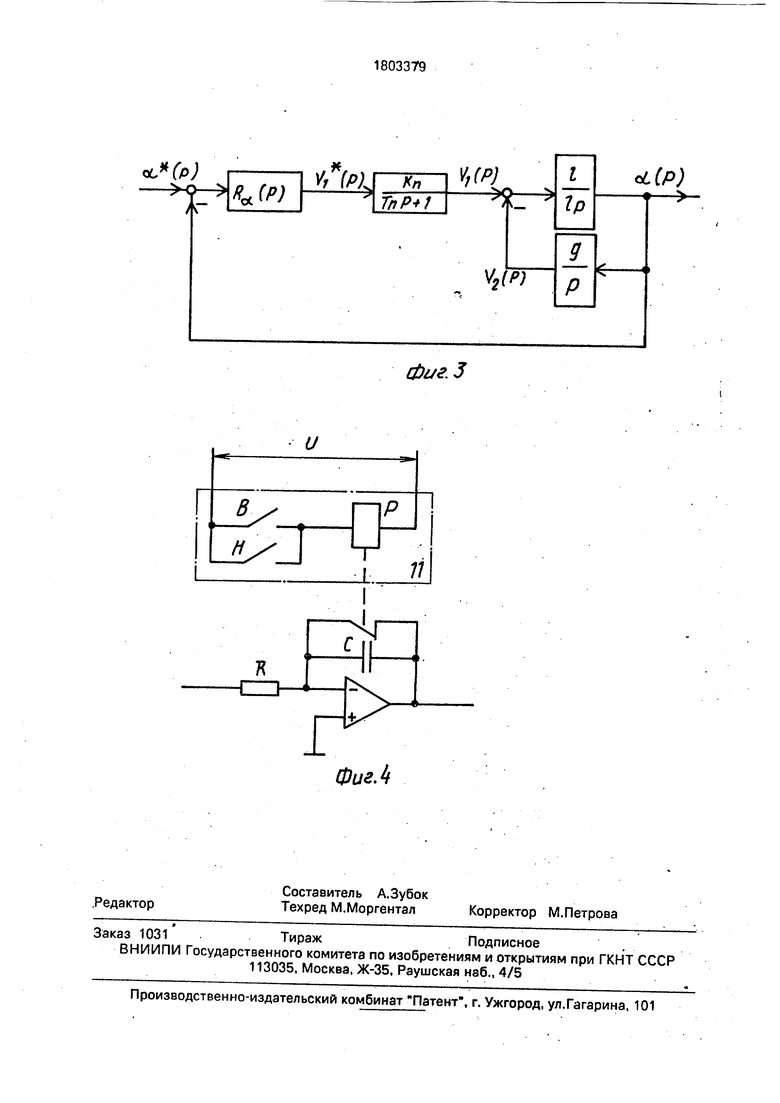
Нафиг.1 представлена функциональная оема предлагаемого устройства; на фиг.2 - функциональная схема регулятора угла от- кг онения гибкого подвеса; на фиг.З - структурная схема контура регулирования угла отклонения гибкого подвеса; на фиг.4 - при- мфр возможной реализации узла установления нулевых начальных условий.
На фиг.1 показан механизм 1 горизонтального перемещения груза 2 на гибком подвесе 3, устройство управления которым содержит датчик 4 угла наклона подвеса 3 и датчик 5 скорости механизма 1 и регулятор 6 скорости механизма, один вход которого соединен с датчиком 5, а выход подключен к управляющему входу привода механизма 1, а также задатчик 7 скорости перемещения груза 3, интегратор 8, вход которого соединен с датчиком 4, регулятор 9 скорости груза, входы которого подключены к задатчику 7 и к выходу интегратора 8, регулятор 10 угла отклонения подвеса 3, входы которого подсоединены к датчику 4 и к выходу регулятора 9, а выход подключён к другому входу регулятора 6. При этом для ограничения угла а отклонения подвеса 3 на максимально допустимом уровне ama регулятор 9 имеет ограничение выходного сигнала
а на уровне «max Узел 11 установления нулевых начальных условий задает нулевые
ел
С
со
о со
СА) VJ О
начальные условия интеграторам 8 и входящим в регуляторы 9, 10 при отключенном приводе механизма 1.
Устройство работает следующим образом.4
Задатчик 7 задает скорость V 2 горизонтального перемещения груза 2, Однако пока не включен привод механизма 1, узел 11 своими выходами шунтирует обратные связи интеграторов 8 и в регуляторах 9, 10, что сохраняет нулевые начальные условия до момента включения привода.
При включении привода механизма 1 срабатываетузел 11, который пускает интеграторы в работу. На входе регулятора 9 сигнал задания скорости перемещения груза 2 сравнивается с сигналом V12 оценки действительной скорости горизонтального перемещения груза 2; по результатам этого сравнения ив соответствии с законом регулирования на выходе регулятора 9 формируется сигнал « задания угла отклонения ее,
гибкого подвеса 3. Сигнал а не может превысить заданный максимально разрешенный уровень . На входе регулятора 10
сигнал о, сравнивается с сигналом а, снимаемым с датчика 4, и по результатам этого , сравнения и в соответствии с законом регулирования на выходе регулятора 10 формируется выходной сигнал V 1, задающий скорость Vi механизма 1 и отрабатываемый контуром регулирования скорости механизма 1, регулятор 6 которого в соответствии с установленным законом регулирования приводит значение скорости Vi, снимаемое с датчика 5, в соответствие с заданной величиной V 1. С появлением сигнала V 1 механизм 1 начинает двигаться со скоростью Vi. При этом груз 2, в силу своей инерционности/отстает от движения механизма 1 до появления угла отклонения подвеса 3 от вертикали а 0. При этом гтод действием силы тяжести
P m2 -д,(2) где та - масса груза 2,
g - ускорение свободного падения, создается сила горизонтального перемещения
F Р tg а Р а - m2 g а, (3) так как угол «относительно мал. Тогда ускорение горизонтального движения груза 2
а ---дай V2
g/adt, (4)
так что сигнал V12 обратной связи по скорости V2 может быть получен интегрировани
ем выходного сигнала а датчика 4, что и осуществляется интегратором 8. Как видно из фиг.1,
(Vi -V2)dt(5) или, при малых углах а,
a«j(Vi-V2)dt, (6)
где I.-длина гибкого подвеса 3.
Контур регулирования скорости меха- низма 1 с регулятором 6 и обратной связью отдатчика 5 может быть приближенно описан передаточной функцией
Wn(P) Кп
Тп Р + 1
(7)
где Кп - коэффициент усиления замкнутого контура регулирования скорости механизма 1,
Тп -эквивалентная постоянная времени этого контура,
Р - оператор Лаплас.а. Тогда, учитывая выражения (6) и (4). структурная схема контура регулирования угла а будет иметь вид, показанный на фиг.З,
где Ro(P) - передаточная функция регулятора угла а . Из этой структурной схемы следует, что. передаточная функция объекта регулирования в контуре
0
W0 (Р)
Кп ТП1
рз+1 р2+ар +
Тп
I
а
ТП1
. (8)
Принимаем передаточную функцию регулятора
КТп
КТП1
R(PHipip+ a +
КпКп
KTnl
КпР
Ь,(9)
где параметры К, a, b определяют на- стройку динамики контура регулирования угла а. Но при замкнутом контуре для компенсации действия форсировки в регуляторе RO(P) на внешний контур регулирования скорости V2 необходимо включить на входе контура динамическое звено с передаточной функцией
Wi(P)
1
К (Р г + а Р + Ь)
(Ю)
Тогда регулятор 10 может быть реализо- так, как показано на схеме фиг.2, где 12
- первый сумматор (узел сравнения), 13 - второй сумматор, 14 - третий сумматор, 15
- первый интегратор, 16 - второй интегратор, 17 - интегрально-пропорционально- дифференциальное звено (ИПД-звено).
Параметры настройки регулятора находят из соотношений
() )
Р Тп
(11)
rie А и В - желаемые коэффициенты оптимизации характеристического полинома,
0(Р)Р3 + А/эР2 +В/зг.Р.+/ог (12)
: .
Так, например, при оптимизации по критерию А.А.Фельдбаума
А В 1 ,4.
(13)
Задатчик 7 и датчик 4 могут быть выпол- н|вны на базе потенциометров, а интегратор 8; узлы регуляторов 6, 9, 10 и привод механизма 1 могут быть реализованы так, как это орисано в упомянутой книге В.К,Гарнова и др. i Такая реализация усилителей, узлов сравнения (сумматоров), интеграторов, ПИД - звена и др. в настоящее время является типовой.
Типовую реализацию может иметь и улел 11. схема которого и принцип действия из фиг.4: при отключенном приводе контакторы В и Н разомкнуты, контакторы р гле Р в цепях обратных связей шунтируют обратные связи интеграторов, удерживая и|с выходной сигнал на уровне, близком к нулевому; при включении привода вперед (н|азад) закрывается контакт В(Н), и напряжение U поступает на реле Р, которое срабатывает, размыкает свои контакты в цепях обратных связей интеграторов, запуская интеграторы на интегрирование.
Как видно из описания и прилагаемых , заявляемое устройство свободно от недостатков известных решений в рассматриваемой области, эффективно гасит колебания подвешенного на гибком подвесе груза (за счет введения контура регулирования угла отключения подвеса от вертикали), повышает надежность выведения груза в заданную точку (за счет введения контура регулирования скорости перемещения груза, т.е. за счет перехода к управлению движением непосредственно груза, а не транспортирующего механизма), увеличивает безопасность эксплуатации подъемно- транспортного механизма (за счет устранения раскачивания груза и увеличения точности управления его движением), увеличивает производительность подъемно-транспортного механизма (за счет увеличения точности управления его движением, что позволяет вести перемещение груза с максимальными прусловию ограничения угла отключения подвеса ускорения и максимально допустимыми скоростями работы механизма).
Формула изобретения
1. Устройство для управления приводом механизма горизонтального перемещения груза на гибком подвесе, содержащее датчики угла наклона гибкого подвеса и скорости механизма перемещения и регулятор
скорости механизма перемещения, один вход которого соединен с датчиком скорости механизма перемещения, а выход подключен к управляющему входу привода механизма перемещения, отличающеес я тем, что, с целью повышения надежности, оно снабжено задатчиком скорости перемещения груза и интегратором, вход которого соединен с датчиком угла наклона гибкого подвеса, регулятором скорости груза, входы которого подключены к задатчику скорости перемещения груза и к выходу интегратора, регулятором угла отклонения гибкого подвеса, входы которого подсоединены к датчику угла наклона гибкого подвеса и к выходу регулятора скорости груза, а
выход подключен к другому входу регулятора скорости механизма перемещения.
2. Устройство поп.1,отличающее- с я тем, что регулятор угла отклонения гиб- кого подвеса включает в себя сумматоры, одними входами первых двух из которых образованы входы регулятора, интеграторы, вход одного из которых соединен с выходом первого сумматора, а выход подключен к одному входу третьего сумматора, выход которого подключен к входу другого интегратора, и интегрально-про- порционально-дифференциальным блоком, вход которого соединен с выходом второго
сумматора, а его выходом образован выход третьего сумматоров подключены к выходу регулятора, причем другие входы первого и второго интегратора.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Устройство для управления приводом передвижения тележки с гибким подвесом груза | 1989 |
|
SU1684239A1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТИКАЛЬНЫМ ПЕРЕМЕЩЕНИЕМ ОБУЧАЕМОГО НА ТРЕНАЖЕРЕ ВЫХОДА В КОСМОС | 2007 |
|
RU2355039C1 |
| Система управления пресс-гранулятором | 1984 |
|
SU1194690A1 |
| Способ управления механизмом передвижения подвешенного на канате груза | 1989 |
|
SU1794865A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |

Фиг.1
Фи г. I
фие.З
