2
2;
4; 3; 3;
7:
1
Изобретение относится к машинам для | ид)ав;1ической очистки рельсов и рельсовых скреп;|ений от загрязннте,лей, удаления засорите,1ей и ба.чласта из-под иодошиы piMbcoii и Г)а,,1аста из liiiia. ibHbix ящиков струями Воды вь;соко1Ч) да15, 1ения при ре- моитс и текуи11 1 содержании желе. -чюдорож|;ОГ() .
Цс.чь изобретения расширение техно- .:о1 IIческиX возможностей.
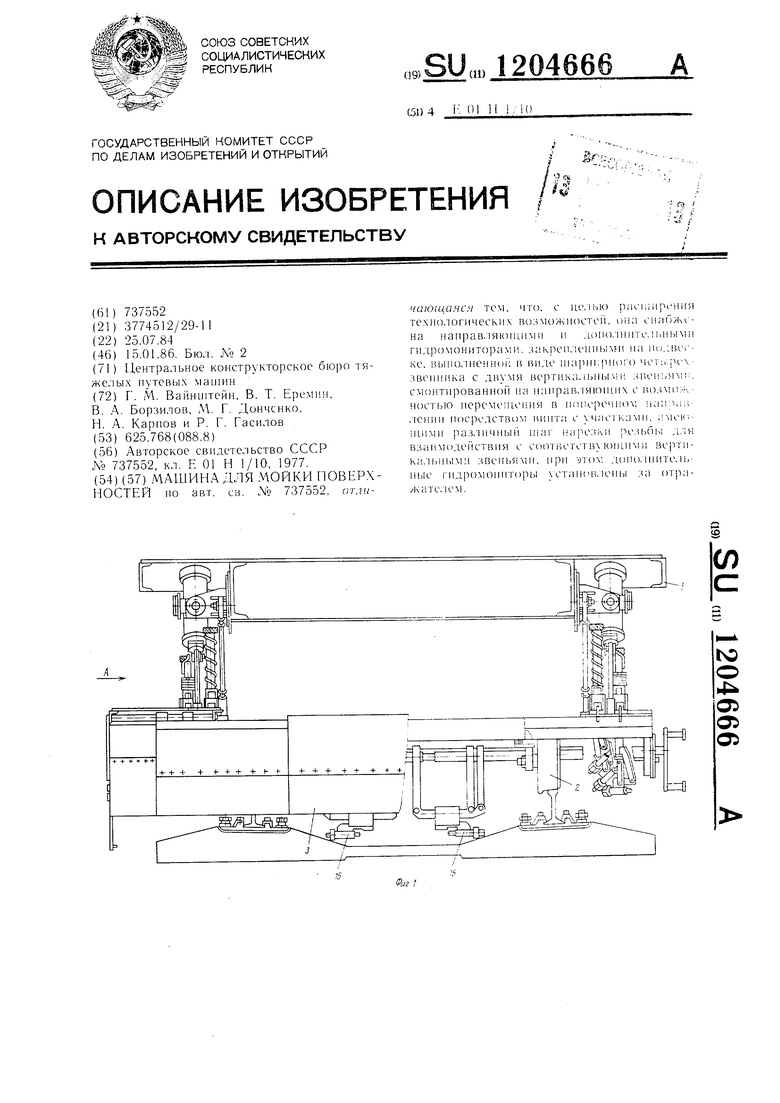
1 изображеиа ма1нииа. {|)нг. 2 1и1д А на фиг. 1; разрез Б В на фиг. вид В на фиг. разрез Г Г иа фи1 . разрез Л- Д на . разрез Н- Е на фиг. разрез Ж- Ж на . щд И иа (|)иг. 3.
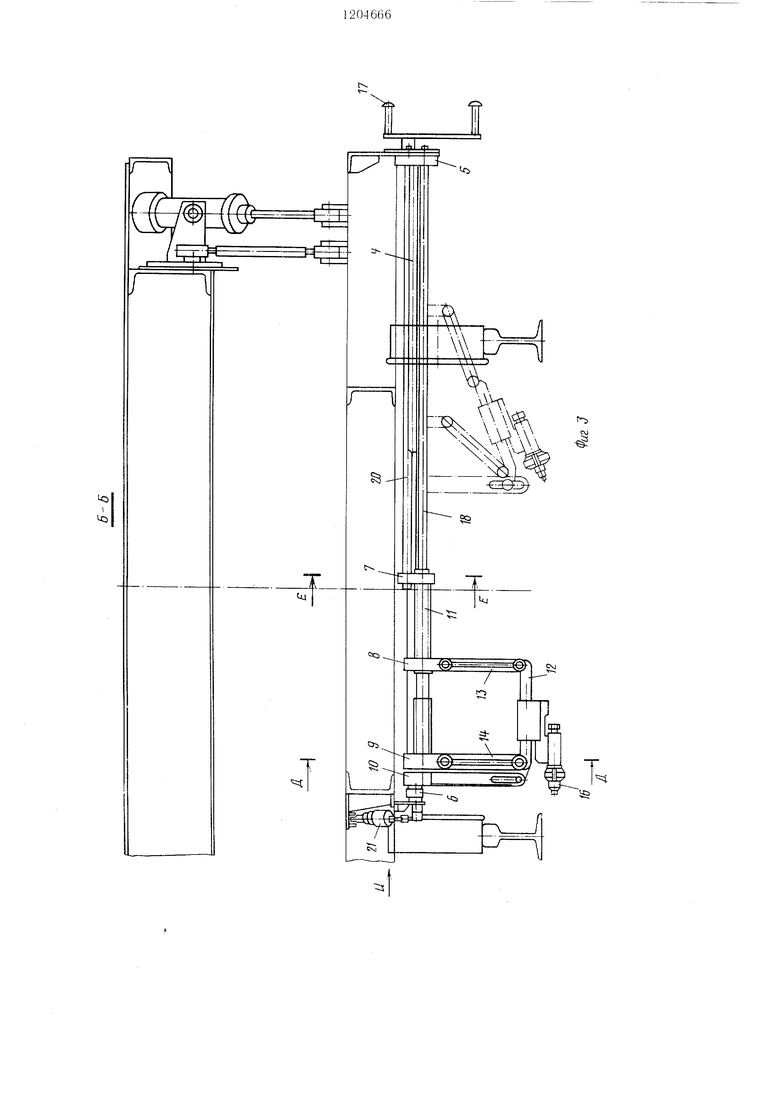
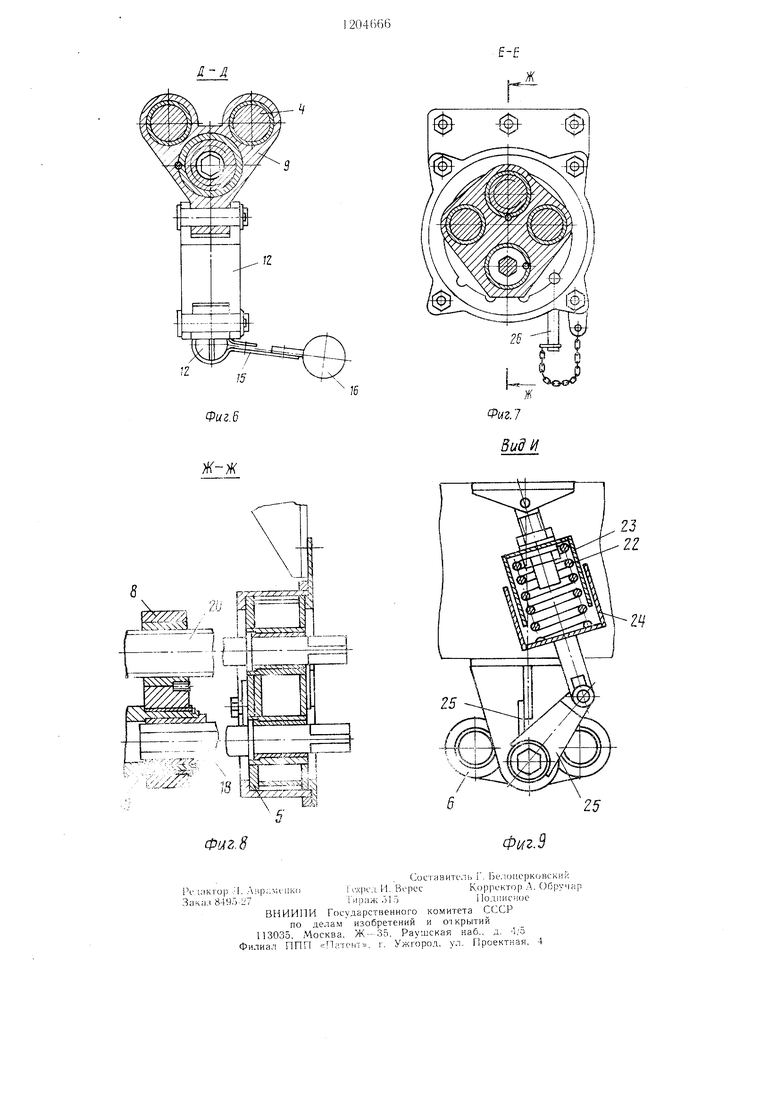
Машина д. 1я очнсткн иоверхиостей содержит базовое 1насси I, на раме KOTOpoi o смоитнрованы си. ювая и насосная установка, а также резервуар с MOIOHICH жид- кост| ю (не иоказаиы) и технологическая тележка 2, несущая отражатели 3, на раме которой установлены исиолмительиые механизмы, в том числе гидромоторы для мойки рельсов и рельсовых скреплений. . а1нииа содержит направляющие 4. концы которых закрен.;1ены в диске 5 и серьге 6, кото)ые установ-лены с воз.мож- иост1)К) поворота вокруг горизонтальной оси на угол 90°. На направляющих 4 распо- ложеиы серьги 7, 8 и 9 и крожнтейп 10, взаимодействующие е винтом 11, который имеет участки с резьбой разного шага. Подвеска 12 выполнена в виде четырех- звеиника, вертикальные звенья 13 и 14 которой взаимодействуют через серьги 8 и 9 с разными участками винта 11. На подвеске 14 установлен хомут 15, па котором закреплен дополнительный гидромонитор .16. расноложенный за отражателем 3. Сдвигу подвески 14 в горизонтальпом направлении Г1реиятетвует Н1арнирная подвижыая заделка оси подвески 12 в подвижном крои- LHTci nie К), который яв;1яетея опорой вин- га 11. Второй оиорой випта 11 с.лужит серьга 7.
Винт 1 1 приводитея вручную рукояткой 17 и ключом 18, представляющим еобой И1ес- тиграппик, Д.-1Я которого в ви.нте 1 i нредуемотрена ответная вту, 1ка 19с впутрен- пим И1ести1 ранником. (Серьга 7 связаиа с ви1г:ом 20, размеренным в диске 5.
.V aHiiiHa содержит также фиксатор 21, состоящий из фужнны 22 и стаканов 23 и 24. Кронн1тейп 25 насажен на квадрат хвое- серьги 6 и иоджимается пружиной 22 к упору кронн1тейиа 25, жестко за крен- . 1сии()го на раме тележки 2. Пружина 22 зажата в стаканах 23 и , один из которых онираетея на кронн тейи тележки 2, а второй возде1 |ствует на рычаг кронштейна 25, обеспечивая вертикальное положение кроиштей1204666
5
5
0
5
0
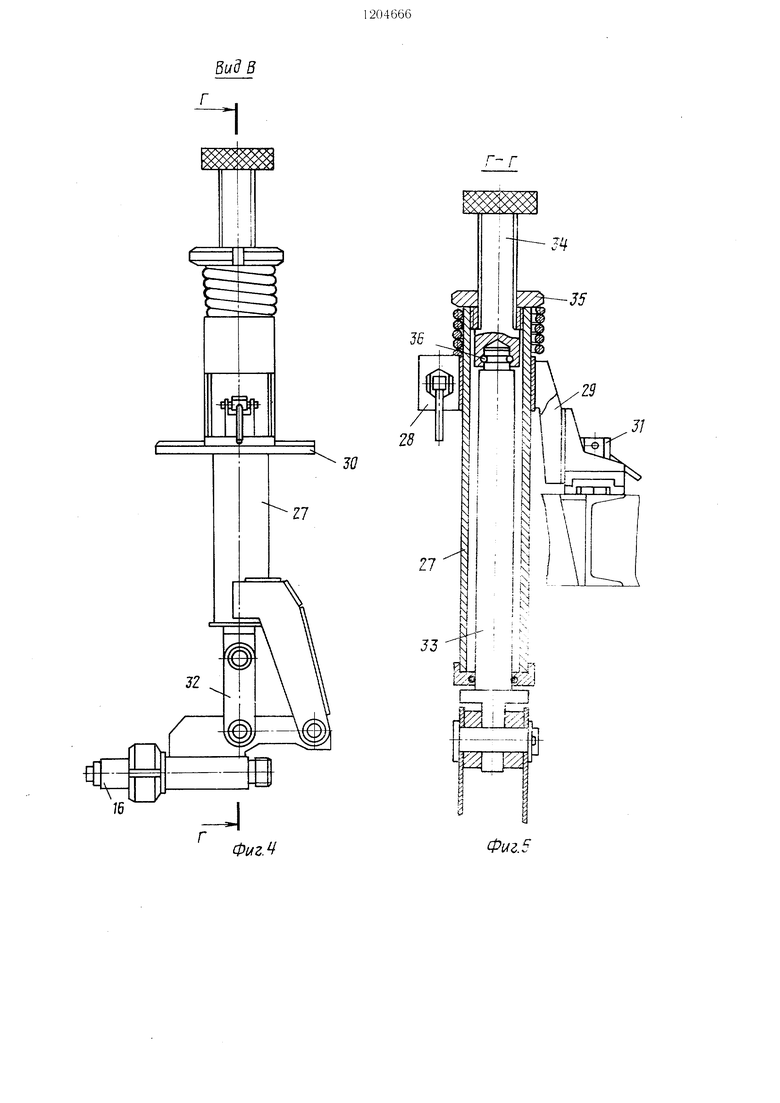
на 10. При транспортировании маи1ины механизм 2 может фиксироваться в наклонной плоскости нальнем 26. Кро.ме того, маншна содержит трубе 27, кот(;рая имеет J возможность поворачиваться вокру верти- ка. идюй оси и пере.меи1аетея к вертикальном паиравлеиии, закре11,:1яется в ве1гг 1ка,, 1ьиом по.южепчи xoMyTo.vi 28 крон1птейиа 29. Пружина предусмотрена для облегчени;я под ьема трубы 27. Кро 1Н1тейн 29 усталювО ;1ен на горизонта; ьпой нанравляюшеГ; 30, жеетко закреллеино на раме, Р, поперечном к оси iiyTii г:аправлении, крепится к направляюп1сй 30 гайкой 31. К пижнс части трубы 27 присоединен кронштейн, в котором н1арпирно закренлена одна ось хвостовика дополнительного гидро.монитора 1В. Вторая ось П1арнирно соединена с серьгой 32, связанной со иггангой 33, н.1ариирно соединенной с сер1згой. Вертикальное перемеи1е- пие игганги 33 обеспечивает винт 34
0 е гайкой 35.
Винт 34 и.меет гнездо, в которое входит хвостовик итанги 33 с кольцевой канавкой и 1итифтами 36, установленными в винте 34. Ключ 18, винт 20 и винт 34 выведены из зоны действия гид)омо1 итор- пых струй.
А а111ипу подают к .месту производства работ транспортной скоростью. Техно югичес- кая тележка 1, зак|)еп,мениая на машине, опускается на рельсы и механизмы, смонтированные на ней, настраиваются па работу трех видов: удаление засорителя и ба, 1лас- та из-нод ПОДОН1ВЫ рельсов; удаление балласта из нитальпых ян 1иков и очистка pe. ibcoB и рельсовых скреплений от засорителей.
Удаление засорителей и балласта из-под ПОДОП1ВЫ рельсов осуществляется следую- ши.м образом.
При враплении ключа 18 рукояткой 17 вращение через ответную шестигранную втулку 19 передается випту 11, при этом
серьги 8 и 9, и.меющие гайки с резьбо(| разного И1а1 а, пере.меагаются но паправляю- HuiM 4 и через подвески 12 и 13 поворачивают подвеску 14 с закренлепны.м на ней догкх пнительным гидромонитором 16, при этом гидромонитор 16 устанавливается под углом 10-20° к поверхности балластной призмы. Расстояние от края выходного отверстия гидромонитора до края подошвы рельса внутри колеи устанавливают равным 400--600 .мм. Эта регулировка производится при вращении винта 20 рукояткой 17. Винт 20, ввертываясь в гайку серьги 7, перемещает ее по нанравляю- HUiM 4. Серьга 7. являясь юдвижно опорой винта 11, передвигает его, при этом но направляющим 4 скользят серьги 8 и 9,
5 а также кронп1тейн 10, который являете я второй нодвижной опорой винта 11.
Пос. установки дополиительпого гидро- мопитора 16 в него подается вода нод давлением 100-150 атм и MaiuHna ДЕ ижо гся с рабочей скоростью 1,5-4 км/ч, что приводит к удалению засорителей 1 з-под подошвы рельсов.
При наезде гидромонитора 16 на препятствие механизм 2 отклоняется от вертикальной осн плоскости вокруг оси вращения диска 5 и серьги 6, При этом гидромонитор 16 поднимается, а после прохождения препятствия возвращается в исходное положение под действием фиксатора 21.
Удаление балласта из П1пальных ящиков осуществляется следующим образом.
Гидромонитор 16 устанавливается нод углом 15-25° к новерхности балластной призмы. Подается вода поддавлением 100-150 атм, и гидромонитор 16 перемещается вдоль нпального ящика, уда.чяя балласт от рельса до середины пути. Удаление балласта от середины нути до другого рельса нроизводится аналогично после передвижения мащнны таким образом, чтобы над этим ящиком завис гидромонитор 16, направленный в противоположную сторону.
Очистка рельсов и рельсовых скреплений осуществляется следующим образом. Направ
;iHK)T первую lapy гидромониторов на ооко- вую поверхность го. ювки рельсов под уг.-юм О (У к поверхности балластной npH3Miii и под углом 110-120° к поверхности очистки ре, тьсов по направлению движения машины. Вторую пару гидромониторов направ. 1яют на ineiiKH рельсов под уг,пом 5- 20 к поверхности балластной призмы и под углом 110-120° к новерхности Н1ейки рельса. Расстояние от края выходного отверстия гидромонитора до очищаемой поверхности 200-300 мм. Третья пара мониторов направляется на подоншу и скрепления рельсов под уг,10м 40-60° в вертика.пьной п,1оскости, норма, 1ьной к оси пути, на расстоянии 200-250 мм от очищаемой поверхности.
После настройки механизмов машина начинает движение с рабочей скоростью 1,5 - 4 км/ч, зависян1.ей от степенн загрязнения рельсов и скреплений.
В зависимости от конкретных условий все | идромониторы и дополнительные гидромониторы могут работать как раздельно, так и одновременно.

| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для мойки поверхностей | 1977 |
|
SU737552A1 |
| Машина для мойки поверхностей пути | 1986 |
|
SU1418384A1 |
| Щебнеочистительная машина | 2024 |
|
RU2834253C1 |
| Машина для удаления балласта из железнодорожного пути | 1983 |
|
SU1137134A1 |
| Щебнеочистительная машина Чекина | 1985 |
|
SU1300065A1 |
| Щебнеочистительная машина | 2024 |
|
RU2831848C1 |
| Машина для уплотнения балласта железнодорожного пути | 1982 |
|
SU1036821A1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ БАЛЛАСТА ИЗ-ПОД ПОДОШВЫ РЕЛЬСА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2005 |
|
RU2293812C1 |
| Машина для балластировки пути узкоколейной железной дороги | 1975 |
|
SU696084A2 |
| Щебнеочистительная машина | 2024 |
|
RU2839787C1 |
Напраёпение движения
iJTi
Ж
т.
.. )A V
Ч
IQ
SE
1ц
.Т
Вид В
16
Фиг.
Г-г
JJ
Фиг. 5
л-д
Фиг.5
Ж-Ж
.8
Сос 1 авитс, 11 Г. Be.ioucpKOBCKi
пктор I. A:ip;.Mi-iiK(I .1. И, ВересКорректор Л. Обр;
Зака, 849Г).27Гирал; . ilTjПодписмое
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, ,Носква, Ж-35, Раушская наб,, д,
Филиал ППП «П;пе -п, г. Ужгород, ул. Г1роект1;ая, 4
.9
| Машина для мойки поверхностей | 1977 |
|
SU737552A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
