(54) МАШИНА ДЛЯ БАЛЛАСТИРОВКИ ПУТИ УЗКОКОЛЕЙНОЙ ЖЕЛЕЗНОЙ ДОРОГИ
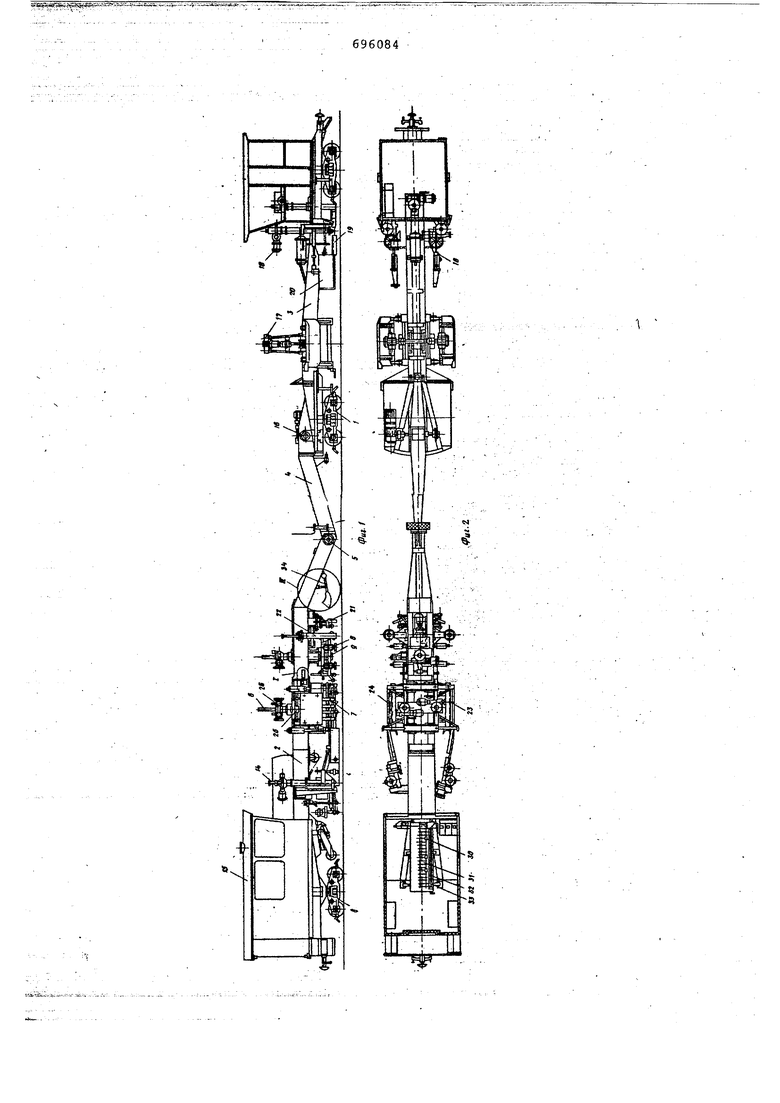
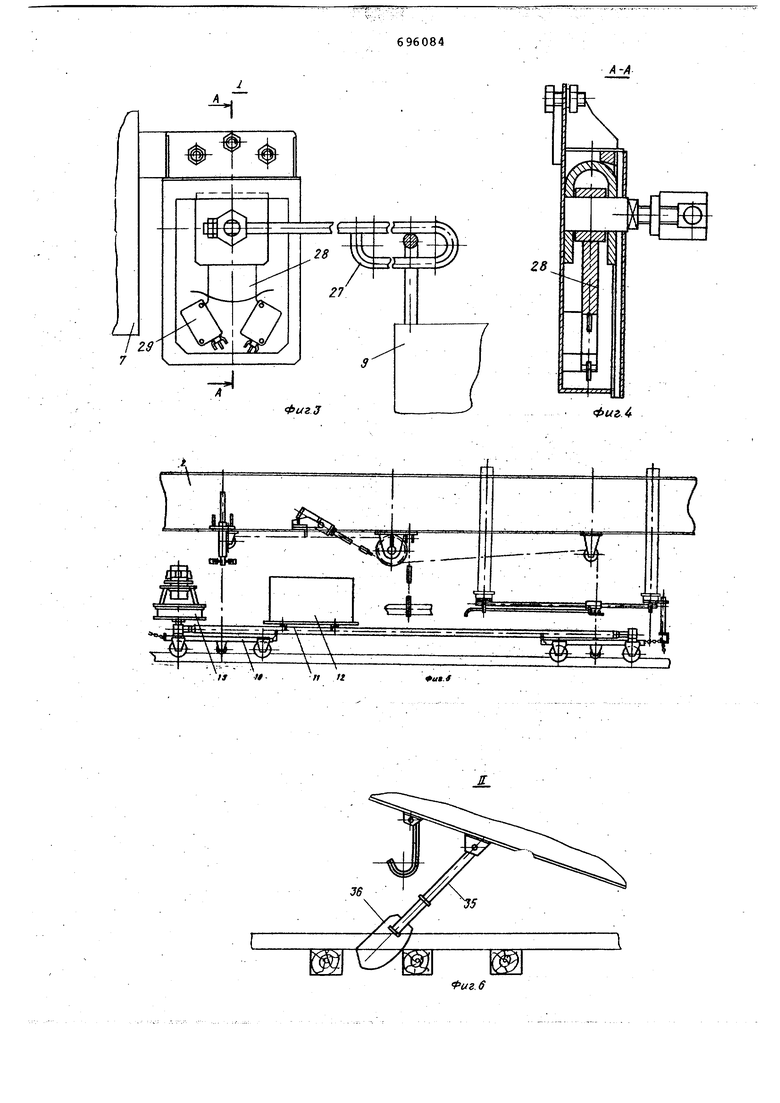
у на фиг. 3 - узел I фиг, 1; на иг, 4 г разрез А-А Фиг, 3; на иг, 5 - койтрЬлькб-измерИФельная истема;на фиг, 6, - узел II фиг,1 г на фиг, 7 ;- тд же, вид Сверху,
Машина для балластировки пути 5 узкоколейной железной дороги содерит опирающиеся на ходовьае тележки 1 фермы 2 и 3, сочлереннве посредством балки 4 с шаровым шарниром 5, ерма 2 выполнена консольной и на Q ней смонтиро)&аны устройство 6 для подбивки шпал с рабочими органами 7, рельсовый захват, состоящий из четырех пар роликовых клещей 8, шарйирно закрепленных на раме 9, контрольво-иэмерительная система, включающая измерительные тележки 10, балку-хорду 11/ связывающую тележки. На балке-хорде 11 установлены датчик плана 12 и датчик 13 уровнями 2п продольного профиля. На ферме 2 также смонтированы устройство 14 оправки балластной прйзлш и центральный пост уйравленвя 15,
На вtopoй ферме ймо нтнров аны устрОйство 16 сдвига пути,уплотнитель от- косов 17 и дозируквдее устройство 18 на каждую рельсовую ниТь с ножом 19 и крыльями 20, при этом каждое устро йств о имеет индив идуаль ный привод.
Перед рельсовым захватом располо- 30 жены шпальная щетка 21 сплавакнаей подвеской и стойки 22 балластерной струнки, позволяющие регулировать высоту установки струнки по отнсяиея к рельсошпальной рапетке, . 35
Установленное за рельсовым захватом устройство 6 для подбивки шпал состоит из правого 23 и левого 24 рибрационных рабочих органов с амортизирующими подвесками и винтовым 40 механизмом заведения 25, механизма подъема и опускания рабочих органов 26,. .
Каждый рабочий орган устройства для подбивки шпал включает Следящую -е систему, содержащую рычаг 27 с продольным пазом на конце, связанный с рамой 9 рельсового захвата. Другой конец рычага 27 взаимодействует через толкатель 28 с микровыключателями ел 29, жестко закрепленными аа рабочих орга-нах 7 устройства для ЪЬдбйвйи шпал, . .. . ПРИ помощи датчиков 12 и 13 гфоизводитсй запись натурного состояния плана пути на планшете 30, ко- 55 торое используется как база для настройки шаблона 31 (программа) для производства автоматической рихтовки. Программа выправки пути и продольном профиле и по уровню задается 60 шаблонами 32 и 33,
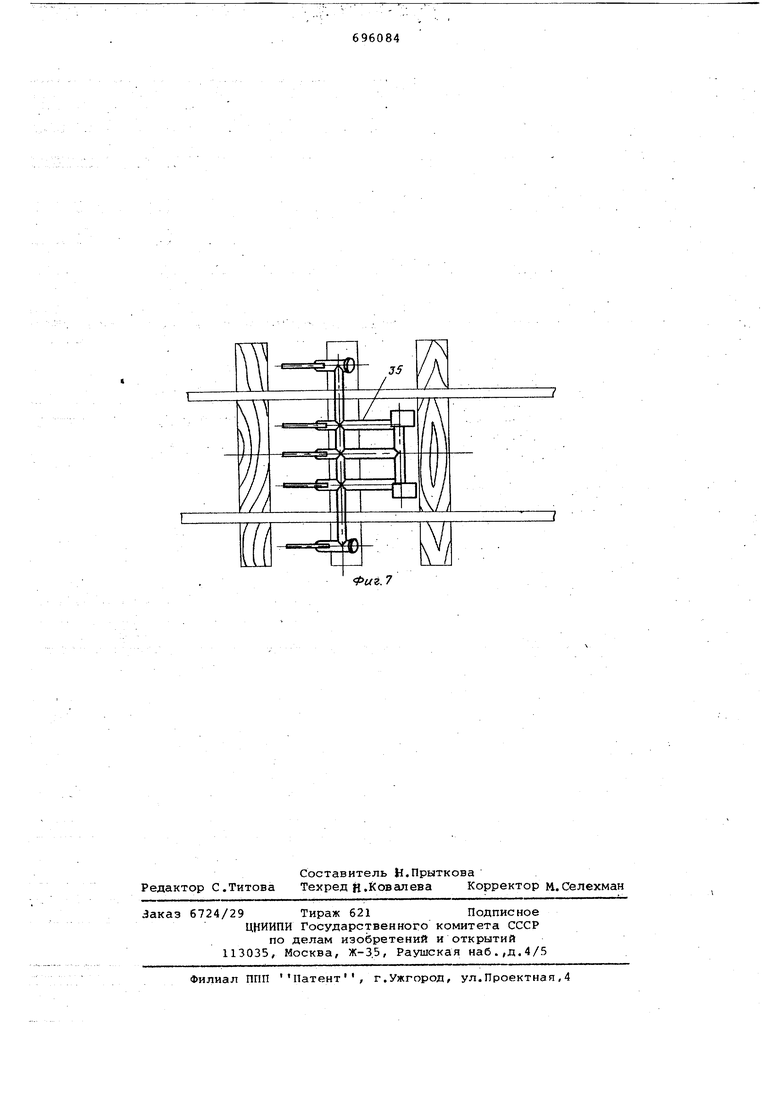
Для работы со слежавшимся и уплотнейным балластомП1 и подъемке пути перед рельсовым захват ей установлен рыхлитель 34. 1ыхлитёль состоит из 65
шарнирно закрепленных на ферме рычагов 35 с режущими элементами 36 на конце, обеспечиёакндими при движении машины обрушение Поднятого вместе с рельсошпальной решеткой слежавшегося баЛласта в межшпальные ящики,
Предлагаемой машиной может выполняться дозировка балласта, подъем на балласт, выправка пути во всех трех плоскостях с одновременной подбивкой, заправка и уплотнение откосов балластной призмы,
Предварительно выгруженный на путь балласт устройством 18 распределяется по всей поверхности пути. Для этого раскрываются крылья 20 и нож 19 устанавливается на заданную высоту,Подъемка пути осуществляется рель.«овым эахватсм клещи 8 которого йывешй)ва1от рельсошпальную решетку на эесданн по высоту. Под рельсошпальную решетку пропускается и закрепляется на стойках 22 балластерная стрункА в рабочее положение переводится рыхлитель 34 щётка 21 переводится в рабочее положение, она опирается своими роликами на рельсы; во время движения маииины струнка разравнивает и рыхлит балласт под шпалами, а щетка сметает балласт с постелей шпал в междушпальные ящики и на плечи балластной призмы.
Для рихтовки пути при предварите льнс$4 проходе машины посредством контрольно-измерительной системы производился запись натурного состоя«ия 21Лана железнодорожного пути,
Затем, по данным записи настраивается шаблон 31, задающий программу рихтс ки. Непосредственно рихтовк железнодорожного пути производится при заправленнсий рельсовом захвате посредством устройства 16,
Выправка в продольнсам профиле и по уровню п оизёодится без предварительной записи натурного состояния пути от шаблонов, задающих программу, с помощью рельсового захвата и контрольно-измерительной системы.
Подбивка шпал производится устройством 6 при приподнятой рельсошпальмой решетке. Согласованность работы рельсовсйо захвата и устрой ства для подбивки шпал производится слёдящей системой, обеспечивающей зазор безопасности между верхней гранью рабочего органа и нижней постелбю вшалы при любом полбжении рельсошпальной решетки, Рельсовый . захват в процессе работы под действием сигналов Контрольно-измерительной системы изменяет свое положение по высЬте (поднимается, опускается, перекашивается), Поскольку его рама соединена с рычагами следящей системы правого и Левого подбивочного органа, изменение наклона рычага
27, а следовательно, поворот Толкателя 28, взаимодействующего с рычажками микровыключателей 29/ вызывает замыкание контактов соответстByroidero микровыключателя, которые включают электроприводы мёханиэмдЕ подъема рабочих .органов для работы вверх или вниз; действие мexaниэ 4a продолжаете до fex nojp, пока parta захвата и рабочей орган не займут относительно друг друга прежнее положение.
ТраН1аеи, образуемые механизмом подбивки шпал с боков балластной призмы, засыпаются крыльями устройства 14 оправки балластной, призмы. Уплотнителем откосов 17 производитс вибрационное yплotнeниe откосов балластной призмы.
а зависимостей от условий работы выправка, рихтовка и подбивка ьтал могут производиться одновремейнЬ за один проход.
В связи с ограниченной мощностью уксоколейных локомотивов дозатор балласта и уплотнитель откосов балластной призмы установлены для работы машины при обратном проходе.
Формула изобретения
1, Машина для балластировки пути узкоколейной железной дороги по авт.св. 323498, отличающа я с , 1г Целью повышеВИЯ производительности в работе и расширения ее функциональных возможностей, она снабжена устройством для :подбивки шпал с рабочими органами, контрол15но-йзмерительной системой, смонтйррваннЕЛъШ на консольной ферме, и упйб нител ем;Ь к0йов, установлен- , нь1М на вторбй , на которой так «ё cMoHTHpoiaifid дбзирующёе устройство
2.Машшна по ri.l, о т л и ч а н$.
б ща я с я тем/ что контрбльно-измерительная система содержит измерительные тележки/ валку-хорду, связывающую те чежкй, на которой установлены датчики плана и уровня.
5
3.Мгиаина, по п.п« 1-2/ о т л и ч а ю « а Яс я тем, что, с целью Повышения надёжности, она снабжена установленными на рабочем органе микровшлючатёЯгМй и рычагом, один
0 конец KOTOEiord вьвтолнён с продольным пазом, а второй связан с микрог
рыключател1ЯМй, прйчеаи конец рычага с прбдоль ным паз ом ев я за н. с рель сой ьм захватом.
5
4.Машина по п.1, о т л и ч а -
ю и а я с я тем, что, сцелью рых- ; лёния уплотнённого балласта при подъёмке пути, рельсовым захват(а1 Устанорлёя рш{литёль, представ0лякший -собойЩарнирно закрепленные на ферме (Рычаги с режущими элемента Мйгйаконцё. ./.... .
ФигЗ
Фиг,4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъемки железнодорожного пути на балласт | 1979 |
|
SU855108A1 |
| Устройство для подъемки железнодорожного пути на балласт | 1981 |
|
SU1025772A1 |
| Устройство для подъемки железнодорожного пути на балласт | 1982 |
|
SU1030453A1 |
| Путевая машина | 1977 |
|
SU734330A1 |
| МАШИНА ДЛЯ ПУТЕВЫХ РАБОТ | 2008 |
|
RU2379401C1 |
| Устройство для реконструкции железнодорожного пути | 1941 |
|
SU67036A1 |
| ВЫСТУП ШПАЛЫ | 2017 |
|
RU2646703C1 |
| СПОСОБ ВЫПРАВКИ ПУТИ | 2007 |
|
RU2385978C2 |
| ЖЕЛЕЗОБЕТОННАЯ ШПАЛА | 2013 |
|
RU2536433C2 |
| СПОСОБ ПОДБИВКИ СТРЕЛОЧНОГО ПЕРЕВОДА НА ПЛИТНОМ ОСНОВАНИИ | 2021 |
|
RU2789281C1 |
и н
Фиг.7
