1
Изобретение относится к машиностроению и может быть использовано в приводах машин.
Целью изобретения являетйя повышение нагрузочной способности путем увеличения поверхности контакта и снижения динамических нагрузок при включении.
На фиг,1 показан предлагаемый механизм свободного хода, первый вариант; на фиг.2 - то же, второй вариант; на фиг.З - упругие элементы, варианты.
Механизм свободного хода содержит ведущую зведочку 1, ведомую обойму 2, ролики 3, поджатые пружинами 4. Часть контактной зоны звездочки вьшолнена в виде симметричного участка 5 с переменной жесткостью (в виде балки переменного сечения с защемленными концами),
Зона 6 прогиба участка 5 выполнена малой кривизны, исключающей появление концентрации напряжений, и может быть заполнена вставками из упругих элементов - пружинной втулкой 7, набором пластин-пружин 8 или материалом 9 и 10 с модулем упругости, меньшим чем у стали. Кроме того, ось симметрии зоны прогиба смещена на величину +f или -.€ в зависимости от требуемого угла заклинивания в направлении рабочего перемещения ролика.
Конструктивные размеры контакт- ной зоны, т.е. параметры г, S, h определяются требуемой величиной прогиба ii в зоне контакта в зависимости от погрешностей изготовления
12065222
и предельного износа поверхностей контактирующих тел. Параметр f задается в зависимости от требуемого угла заклинивания, так при & О 5 и + угол ot увеличивается, при -Е. угол .-оС уменьшается.
10
15
20
25
30
35
Механизм работает следующим образом.
При рабочем ходе ведущая звездочка 1, вращаясь со скоростью oj , приводит в заклиненное состояние ролики 3 и увлекает силами трения ведомую обойму 2 в том же направлении. При обратном ходе звездочки 1 ролики 3 проскальзьгоают, вращаясь вокруг своих осей, и расклиниваются создавая свободньй ход механизма.
В процессе заклинивания ролики нажимают на рабочую поверхность звездочки и создают прогибы Л| ее выравнивания, углы заклинивания d и величину давления на ролики. Таким образом, изобретение позволяет компенсировать погрешность изготовления рабочих поверхностей роликов, звездочки и обоймы, свести к минимуму неравномерность распределения давлений на ролики, снизить динамичность -включения механизма за счет прогиба балки переменного сечения, увеличить зону контакта на звездочке, снижая тем самым ее износ, исключить концентрацию напря-. жений изгиба. Следовательно, предлагаемый механизм имеет повьш1ен- ные несущую способность, надежность и долговечность.
Механизм работает следующим образом.
При рабочем ходе ведущая звездочка 1, вращаясь со скоростью oj , приводит в заклиненное состояние ролики 3 и увлекает силами трения ведомую обойму 2 в том же направлении. При обратном ходе звездочки 1 ролики 3 проскальзьгоают, вращаясь вокруг своих осей, и расклиниваются создавая свободньй ход механизма.
В процессе заклинивания ролики нажимают на рабочую поверхность звездочки и создают прогибы Л| ее выравнивания, углы заклинивания d и величину давления на ролики. Таким образом, изобретение позволяет компенсировать погрешность изготовления рабочих поверхностей роликов, звездочки и обоймы, свести к минимуму неравномерность распределения давлений на ролики, снизить динамичность -включения механизма за счет прогиба балки переменного сечения, увеличить зону контакта на звездочке, снижая тем самым ее износ, исключить концентрацию напря-. жений изгиба. Следовательно, предлагаемый механизм имеет повьш1ен- ные несущую способность, надежность и долговечность.
Ли,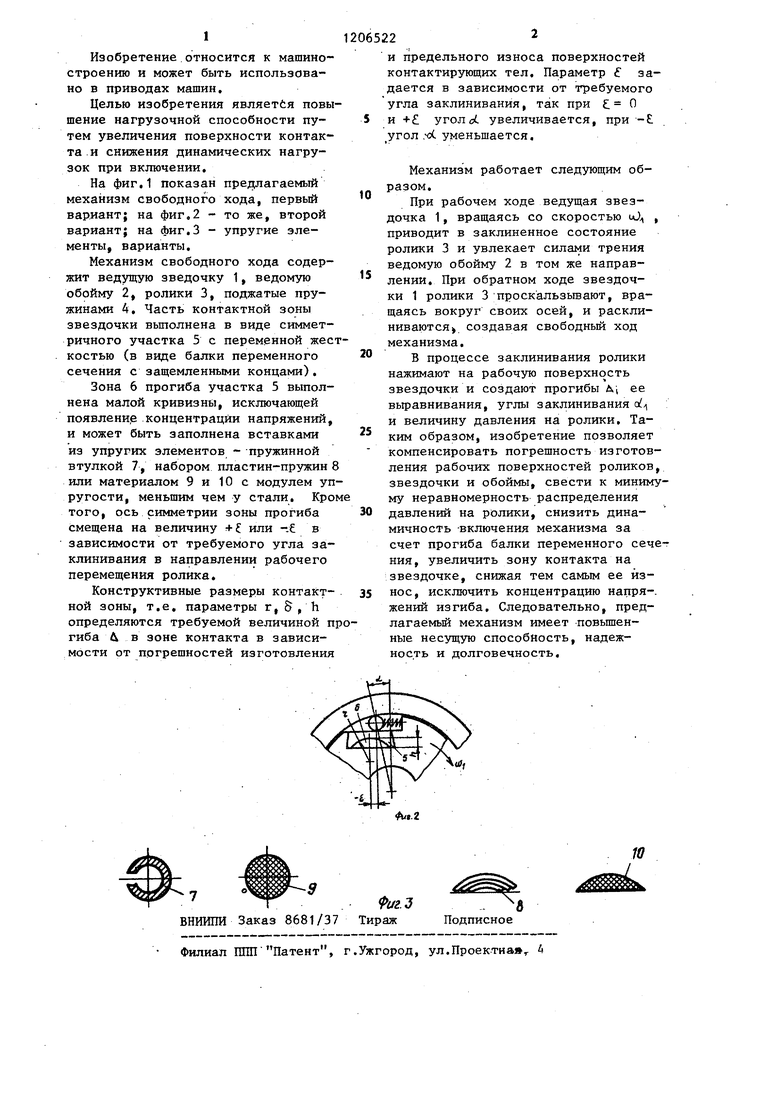
| название | год | авторы | номер документа |
|---|---|---|---|
| Вариатор Н.П.Ефимова | 1981 |
|
SU1199674A1 |
| Вариатор Н.П.Ефимова | 1987 |
|
SU1430646A1 |
| Механизм свободного хода Н.П.Ефимова | 1981 |
|
SU1208361A1 |
| Механизм для преобразования вращательного движения в возвратно- вращательное | 1978 |
|
SU777288A1 |
| Измеритель крутящего момента | 1976 |
|
SU696313A1 |
| МУФТА СВОБОДНОГО ХОДА | 2011 |
|
RU2468266C1 |
| Механизм привода хода гусеничных машин | 1986 |
|
SU1315570A1 |
| Клиновой механизм свободного хода | 1981 |
|
SU966354A1 |
| Стенд для испытания муфт свободного хода | 1978 |
|
SU720332A1 |
| Клиновый механизм свободного хода | 1986 |
|
SU1434179A1 |

.З
,
ВНИИПИ Заказ 8681/37 Тираж Подписное Филиал ПИП Патент, г.Ужгород, ул.Проектна i
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 0 |
|
SU347482A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| МУФТА СВОБОДНОГО ХОДА | 0 |
|
SU207593A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
