13
выполнены пазы, в которых расположены опоры. Посредством опор со звездочкой 10 связаны две пары упорных полуколец 20, 21 и 22, 23. При включении закрепленных на раме привода тяговых гидроцили щров (ГЦ) через связанные с их штоками рычаги обойм 8 и 9 и обгонную муфту вал 6 приводится в непрерывное вращение. За счет того, что шток одного тягового ГЦ втягивается, а шток другого вьщви1
Изобретение относится к самоходным машинам на гусеничном ходу, а более конкретно к механизмам привода ходовой части.
Цель изобретения - повьшение удобства эксплуатации.
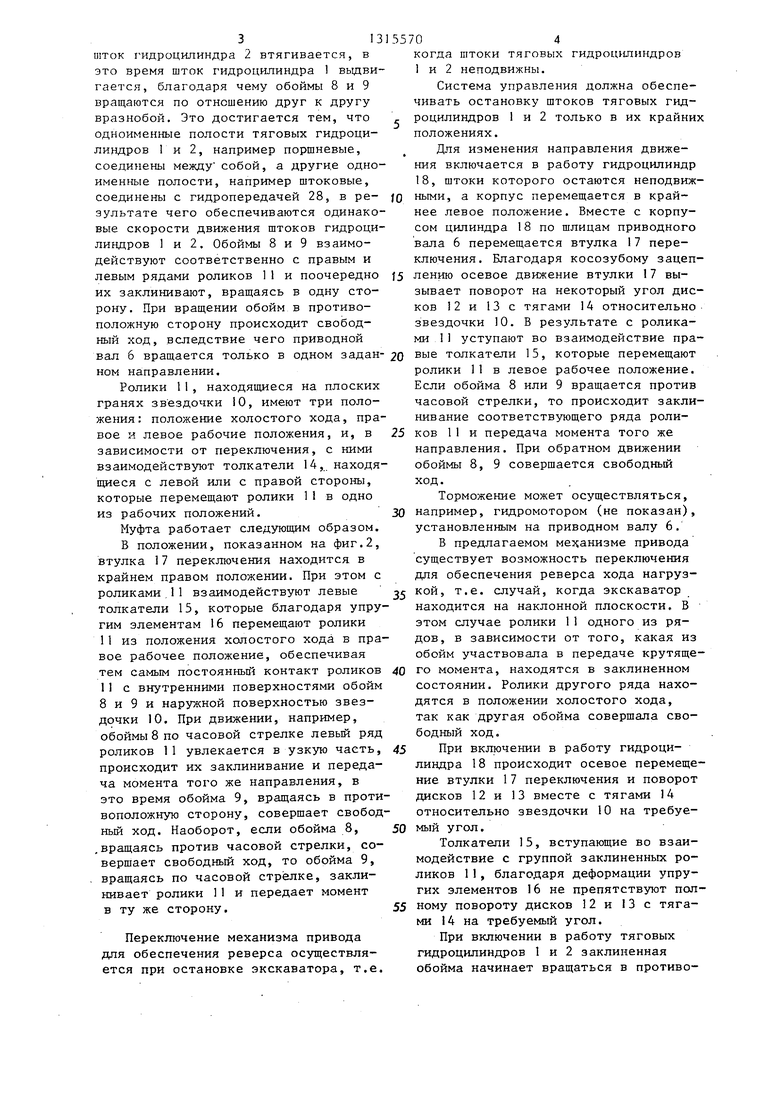
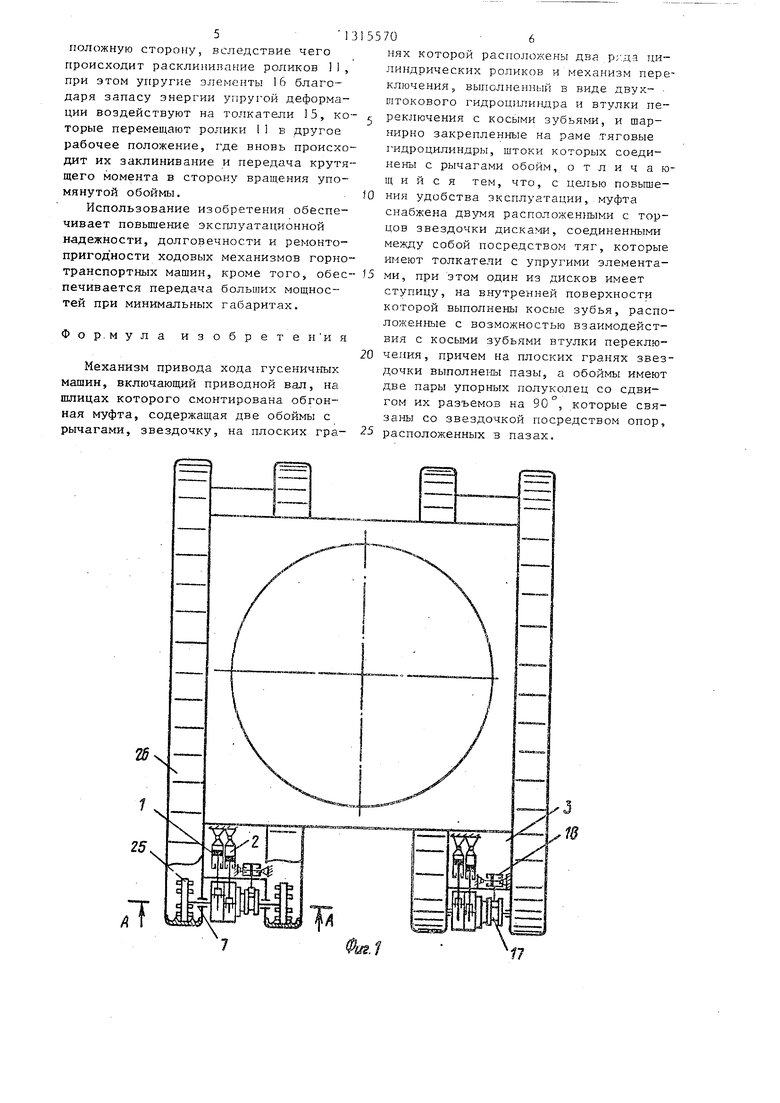
На фиг.1 изобрежен механизм привода хода экскаватора; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг,4 - разрез Б-В на фиг.2; на фиг.5 - вид Г на фиг.З.
Механизм привода хода гусеничных машин включает два тяговых гидроцилиндра I и 2, шарнирно закрепленных на раме 3, штоки которых соединены с рычагами 4 и 5, приводной вал 6, смонтированный на подшипниках 7, на шлицах которого установлена обгонная муфта, содержащая две обоймы 8 и 9, наружные поверхности которьп жестко соединены с рычагами 4 и 5, звездочку 0, на плоских гранях которой рас положены два ряда роликов 11, два диска 12 и 13, установленные на звез дочке 10 и соединен1№ е посредством тяг 14, на которых закреплены толкатели 1 5 с упругими элемента -зи I 6. Тяги 14 расположены таким образом, что между каждой их парой находится по одному ролику 1 каждого ряда. Диск 13 имеет ступицу, на в1-гутренней поверхности которой расположены косые зубья, входящие в зацепление с косыми зубьями, расположенными на на ружной поверхности втулки 17 переклю чения, которая установлена на привод ном валу 6 с возможностью осевого перемещения-.
Переключение осуществляется гидро цилиндром 18, штоки которого закреп
570
гается, обоймы 8 и 9 вращаются вразнобой и взаимодействуют с рядами расположенных на плоских гранях звездочки 10 роликов 1. Закрепленные на тягах толкатели с упругими элементами перемещают ролики 1. Для изменения направления движения включается двухштоковый ГЦ 18, Происходит осевое перемещение втулки 17 и поворот дисков 12 и 13 с тягами относительно звездочки 10 на требуемый угол. 5 ил.
5
0
-
0
5
0
5
0
лены на раме 3, а корпус соединен с втулкой 17 переключения.
Обоймы 8 и 9 посажены на опоры 19, которые крепятся в прямоугольных пазах звездочки; 10.
Для предотвращения осевого смещения обоймы 8 и 9 снабжены двумя упо рами кольцами 20 и 21, закрепленными на торцовой поверхности каждой обоймы, и двумя парами упорных полуколец 22 и 23, установленными на наружной поверхности обойм, которые взаимодействуют, например, с буртами.
Для предотвращения самопроизвольного разъединения полуколец плоскости разъема каждой пары расположены по отношению друг к другу под уг- лом 90°.
Два полукольца 24, установленные в кольцевой проточке между обоймами 8 и 9, служат для осевой фиксации роликов 11. На приводной вал 6 кон- сольно посажены ведущие звездочки 25, взаимодействуюш 1е с гусеничными цепями 26 о Для предотвращення смещения звездочки 10 на ней закреплена упорная втулка 27, взаимодействующая с торцовой поверхностью подшипника 7.
Питание гидроцилиндров осуш;ест- вляется от гидропередачи 28.
Привод работает следующим образом.
При включении в работу тяговые гидроцилиндры 1 и 2 через рычаги 4 и 5 и обгонную муфту приводят в непрерывное вращение приводной вал 6 и ведущие звездочки 25, вследствие чего гусеничным цепям 26 сообщается движение.
Питание гидроцштиндров и 2 организовано таким образом, что если
313
шток гидроцилиндра 2 втягивается, в это время шток гидроцилиндра 1 вьщви- гается, благодаря чему обоймы 8 и 9 вращаются по отношению друг к другу вразнобой. Это достигается тем, что одноименные полости тяговых гидроцилиндров 1 и 2, например поршневые, соединены между собой, а другие одноименные полости, например штоковые, соединены с гидропередачей 28, в результате чего обеспечиваются одинаковые скорости движения штоков гидроцилиндров 1 и 2. Обоймы 8 и 9 взаимодействуют соответственно с правым и левым рядами роликов 11 и поочередно их заклинившот, вращаясь в одну сторону. При вращении обойм в противоположную сторону происходит свободный ход, вследствие чего приводной вал 6 вращается только в одном заданном направлении.
Ролики 11, находящиеся на плоских гранях звездочки 10, имеют три положения: положение холостого хода, правое и левое рабочие положения, и, в зависимости от переключения, с ними взаимодействуют толкатели 14,.. находящиеся с левой или с правой стороны, которые перемещают ролики 11 в одно из рабочих положений.
Муфта работает следующим образом.
В положении, показанном на фиг.2, втулка 17 переключения находится в крайнем правом положении. При этом с роликами , 11 взаимодействуют левые толкатели 15, которые благодаря упругим элементам 16 перемещают ролики 11 из положения холостого хода в правое рабочее положение, обеспечивая тем самым постоянньш контакт роликов 11 с внутренними поверхностями обойм 8 и 9 и наружной поверхностью звездочки 10. При движении, например, обоймы 8 по часовой стрелке левый ряд роликов 11 увлекается в узкую часть, происходит их заклинивание и передача момента того же направления, в это время обойма 9, вращаясь в противоположную сторону, совершает свободный ход. Наоборот, если обойма 8, .вращаясь против часовой стрелки, совершает свободный ход, то обойма 9, вращаясь по часовой стрелке, заклинивает ролики 11 и передает момент в ту же сторону.
Переключение механизма привода для обеспечения реверса осуществляется при остановке экскаватора, т.е.
704
когда штоки тяговых гидроцилиндров 1 и 2 неподвижны.
Система управления должна обеспечивать остановку штоков тяговых гид- роцилиндров 1 и 2 только в их крайних положениях.
Для изменения направления движения включается в работу гидроцилиндр 18, штоки которого остаются неподвижными, а корпус перемещается в крайнее левое положение. Вместе с корпусом цилиндра 18 по шлицам приводного вала 6 перемещается втулка 17 переключения. Благодаря косозубому зацеплению осевое движение втулки 17 вызывает поворот на некоторый угол дисков 12 и 13 с тягами 14 относительно звездочки 10. В результате с роликами 1 1 уступают во взаимодействие правые толкатели 15, которые перемещают ролики 11 в левое рабочее положение. Если обойма 8 или 9 вращается против часовой стрелки, то происходит заклинивание соответствующего ряда роликов 11 и передача момента того же направления. При обратном движении обоймы 8, 9 совершается свободный ход.
Торможение может осуществляться,
например, гидромотором (не показан), установленным на приводном валу 6.
В предлагаемом механизме привода существует возможность переключения для обеспечения реверса хода нагрузкой, т.е. случай, когда экскаватор находится на наклонной плоско.сти. В этом случае ролики 11 одного из рядов, в зависимости от того, какая из обойм участвовала в передаче крутящего момента, находятся в заклиненном состоянии. Ролики другого ряда находятся в положении холостого хода, так как другая обойма совершала свободный ход.
При включении в работу гидроцилиндра 18 происходит осевое перемещение втулки 17 переключения и поворот дисков 12 и 13 вместе с тягами 14 относительно звездочки 10 на требуемый угол.
Толкатели 15, вступающие во взаимодействие с группой заклиненных роликов 1I, благодаря деформации упругих элементов 16 не препятствуют полному повороту дисков 12 и 13 с тягами 1 4 на требуемый угол.
При включении в работу тяговых гидроцилиндров 1 и 2 заклиненная обойма начинает вращаться в противо5 1з
положную сторону, вследствие чего происходит раскли}швание роликов 11, при этом упругие элементы 16 благодаря запасу энергии упругой деформации воздействуют на тoлкaтeJ: и 15, которые перемещают ролики 11 в другое рабочее положение, где вновь происходит их заклинивание и передача крутящего момента в сторону вращения упомянутой обоймы.
Использование изобретения обеспечивает повышение эксплуатапионной надежности, долговечности и ремонтопригодности ходовых механизмов горнотранспортных машин, кроме того, обеспечивается передача больших мощностей при минимальных габаритах.
Фор.мула изобретен и я
Механизм привода хода гусеничных машин, включающий приводной вал, на шлицах которого смонтирована обгонная муфта, содержащая две обоймы с рычагами, звездочку, на плоских гра
06
нях которой расположены два рг.да цилиндрических роликов и механизм переключения, выполненный в виде двух- 0ГТОКОВОГО гидроцилиьщра и втулки переключения с косыми зубьями, и шар- нирно закрепленные на раме тяговые гидроцилиндры, штоки которых соединены с рычагами обойм, отличаю- щ и и с я тем, что, с целью повьгшеНИН удобства эксплуатации, муфта
снабжена двумя расположенными с торцов звездочки дисками, соединенными между собой посредством тяг, которые имеют толкатели с упругими элементами, при этом один из дисков имеет ступицу, на внутренней поверхности которой выполнены косые зубья, расположенные с возможностью взаимодействия с косыми зубьями втулки переключеиия, причем на плоских гранях звездочки выполнешз пазы, а обоймы имеют две пары упорных полуколец со сдвигом их разъемов на 90 , которые связаны со звездочкой посредством опор,
расположенных в пазах.
23
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПРИВОДА ХОДА ГУСЕНИЧНЫХ МАШИН | 1990 |
|
RU2009301C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОГРЕЙДЕРА | 1997 |
|
RU2133317C1 |
| Привод транспортного средства, приводимого в действие мускульной силой человека | 1986 |
|
SU1505832A1 |
| МЕХАНИЗМ НАТЯЖЕНИЯ И ОТПУСКА ОСНОВЫ НА ТКАЦКОМ СТАНКЕ | 2003 |
|
RU2240390C2 |
| Канатная дорога | 1991 |
|
SU1796512A1 |
| Патрон для обработки наружных и внутренних цилиндрических поверхностей, смещенных относительно оси детали | 1979 |
|
SU872048A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| Устройство для автоматической подналадки осевого инструмента | 1983 |
|
SU1117199A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |

Изобретение относится к самоходным машинам и позволяет повысить удобство эксплуатации. Для этого смонтированная на шлицах приводного вала 6 обгонная муфта, содержащая две обоймы 8 и 9 с рычагами, снабжена двумя расположенными с торцов звездочки 10 дисками 12 и 3, соединенными посредством тяг. Диск 13 имеет ступицу. На ее внутренней поверхности выполнены косые зубья, взаимо - действующие с косыми зубьями установленной на валу 6 втулки 17 переключения. На плоских гранях звездочки 10 а S сл tl / (7 со сл сл / fS ч faf.g
В-В
(Zf/Zi /:( 1 Фиг Л
Видг
z
25
Редактор А.Шандор
Составитель М.Синицкая Техред М.Ходанич
Заказ 2325/31 Тираж 606Подписное
ВНИИПИ Государственного комитета СССР
по дапам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
иг.5
Корректор Г,Решетник
| Поляков B.C | |||
| и др | |||
| Конструкции и расчет, - Л | |||
| строение, 1973, с | |||
| Синхронизирующее устройство для аппарата, служащего для передачи изображений на расстояние | 1920 |
|
SU225A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
