2.Механизм поп.1, 0 т л н ч а ю-; , 1щ н и с я тем,чтоон снабжепкольцом,
Изобр1ете1ше относится к машиностроению,
Цель изобретения повышение на- дежности и упрощение конструкции.
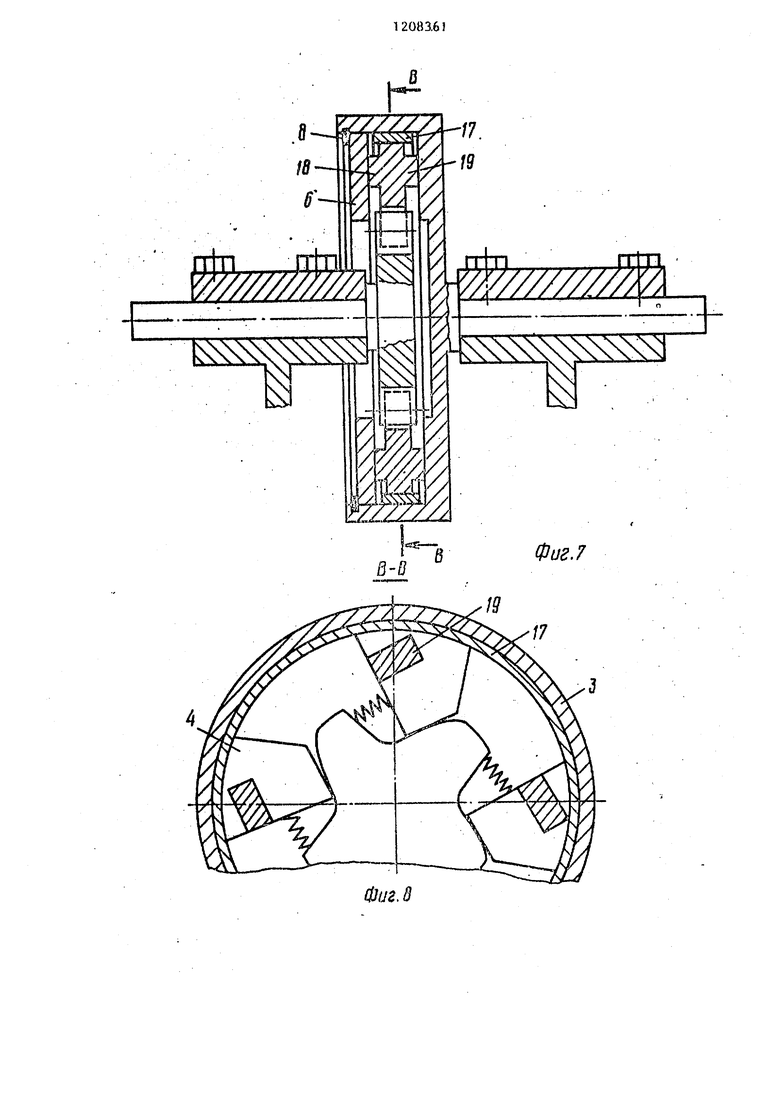
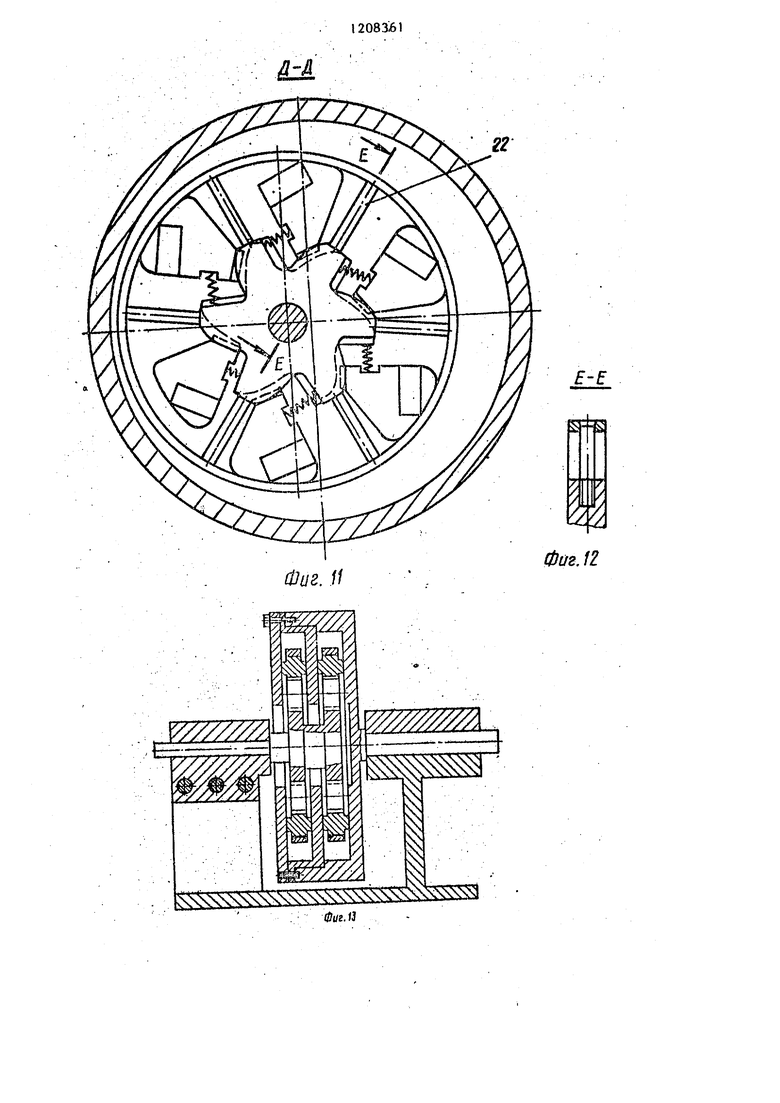
На фиг. 1 изображен механизм об- щнй пид и продольном разрезе (пер-- iibn i париант) ; на фн1 . 2- разрез на фиг. 1-; на фиг. 3 разрез. Б-1.1 на фиг. 2 (заклининающип эле- неит, парный вариант); на фиг. ч. механизмJ общий пид D продольном разрезе (jJTopoii париант) 5 на фиг. 5 .и 6 - разрез Б-Б па фиг. 2, заклинивающий элемент .(второй вариант), jia фиг-. 7 - механизм, продольный разрез (третий вариант); на фиг.8 - разрез В -В па фнг. 7, фиг. 9 - .механизм, нродольньш разрез (четвер- ты1{ вариант), на фиг. 10 - разрез Г-Г на фиг. 9; на фиг. 11 - разрез Д-Д па фиг. 9; на фиг. 12 разрез- Г,-Е на фиг. 1 Г, на фиг. 13 и 14 - MGxainiSM, ПРОДОЛЬНЫ разрез (пятьш и шестой варианты).
Механизм свободного хода содержит корпус 1 , 13 котором размещены на подш пшиках качения или скольжения звездочка 2, обойма 3 и заклинивающие элементы 4. Обойма 3 имеет на- правллгощую (кольцевую канавку) 5. Заклинивающие элементы 4 взаимодействуют со звездочкой 2 и с наирав- ллющей 5 обоймы 3.: они находятся ц задепленш с зубьями звездочки 2 и подвижно установлены в нанравляю- щеГ 5 обоймы 3. Заклинивающие элементы имеют не . трек опорных поверхностей, из которых две соседние установлены с возможностью изаимодействия с напраиля ощай 5 обоймы, а третья.- со звездочкой.
Обойма 3 содержит .диск б, жестко соединенный с обоймой болтами 7. через npymiiHHoe разрезное кольцо 8 или другим способом. Направляющая 5 оСоймы образована поверхностями обоймы 3 и диска 6. Поверхности 9 и 10 направляющей 5,взшмо;:;ействуга1цие с
закрепленным на звездочке т охватьша- пщим заклинивающие элементы.
5
0
5
0
5
0
5
2
заклинивающими элементами 4, выполне-- ны плоскими и нернёндикулярнь& И оси обоймы. Цилиндрическая поверхность 11 обоймы 3 взаимодействует с.внешней поверхностью 12 заклинивашищх эле- ме.птов 4 и имеет с ней начальный линейный контакт, для чего одна из этих поверхностей имеет бочкообразную форму.
Взаимодействующие поверхности заклиниваю1дих .элементов 4 и звездочки 2 выполнены наклонными к оси обоймы 3, причем угол определчется из следуюи1его выражения:
, .. f..eos.oC .
где h - минимальное расстояние в тордовой плоскости между точкамт контакта каждого заклинивающ его элемента со г звездочкой и с обоймой; С - максимальная длина линии
контакта заклинивающего элемента с обоймой в тордовой плоскости;
f- коэффидиент трения J . р, - угол наклона взаимодействующих поверхностей заклинивающего злемента и звездочки к оси обоймы;
о. - тордовьй угол задепления эаклигшвающего элемента со звездочкой.
Механизм содержит регулировочные прокладки 13, устаповленные между диском 6 и -обоймой 3. Заклинивающие элементы 4 соединенв со звездочкой 2 через пружины 14 сжатия. , Звездочка 2 может содержат не одйн, а два зубчатых венца 15 и 16j например, с противоположным (шевронным) направлением угла наклона к оси обоймы рзаимодействующнх по верхностей зубьев звездочки и заклинивающих элементов. Механизм содержит также кольцо 1-7, свободно .
охватывающее заклинивающие элементы и подвижно установленное в обрййе 3
Взаимодействующие порерхнрсти заклинивающих элементов 4 и звездочки 2 могут иметь любой профиль в сечении (эвольвентный по спирали по прямой или по другой кривой), Они могут иметь начальный поверхностный, линейный или точечный контакт-Целесообразно выполнять одну из этих поверхностей бочкообразной формы..
Поверхности заклинивающих элементов 4i взаимодействующие с плоскими поверхностями 9. и 10 направ - ляющей 5 обоймы 3 могут быть плоскими, выпуклыми цилиндрическими с радиусами кривизны Р. и я с Центрами 0 и . 0 Или иными. Эти элементы могут иметь начальный поверхностньш, линейный или точеч- нЬш контакт с направляющей 5 обоймы 3. Заклинивающие элементы 4 могут иметь выступы 18 и 19, взаимодействующие с направляющей 5. Эти выступы целесообразно выполнять прямоугольной формы на торцовой поверхности- Нерабочие профили 20 и 21 соответственно зубьев звездочки 2 и заклинивающих элементов 4 могут выполняться без наклона или с наклоном к оси обоймы. Кольцо 17 может быть установлено в обойме 3 свободно, с большим зазором. Корпус 1 может иметь любую форму. Звездочка 2 и обойма 3 могут быть несо- осны, а несоосность их в корпус 1 может регулироваться. Регулировочные прокладки 13 могут быть установлены между кольцом 8 и диском 6. Все элементы муфты могут быть как стальными (закаленными и незакален- ными), так и не стальными. Взаимодействующие поверхности заклиниваю- пщх элементов 4 и зубьев звездочки 2 могут быть винтовыми,плоскими,бочкообразными. При выполнении звездочки 2 с шев роннымй зубьями осевая сила замыкается на пеицах 15 и 16 .звездочки и на обойме 3, на подтипНИКИ не передается.
Кольцо 17 может быть жестко соединено со-звездочкой 2 винтами 22, закрепленными на вершинах зубьев звездочки.
Механизм содержит также регулирующее устройство в виде плиты 23,. соединенной с корпусом 1 поступательно через стержни 24 п винт 25.
2083614
Стержни 24 соединены жестко с корпусом 1 и подвижно - с плитой 23. Винт 25 соединен с плитой 23 через резьбу., а с корпусом 1 - шарнирно. J На винт 25 жестко установлена рукоятка 26 управления. На плите 23 установлен через подшипники о дин из валов,- например, вал 27.
Механизм работает следующим об10 разом.
При вращении звездочки 2 против часовой стрелки механизм заклинивается, -обойма. 3, заклинивающие эле ментш 4, пружина 14 и кольцо 17 вра15 щаются вместе со звездочкой как одно жесткое звено. При этом в месте взаимодействия заклинивающих элементов 4 со звездочкой 2 на заклинивающие элементы действует торцовая
2Q сила Q и осевая сила S . Под действием осевой силы S заклинивающие элементы перекашиваются на небольшую величину (на несколько угловых м1П1ут). На заклинивающие элемен25 ты 4 действует со стороны направляющей 5 обоймы 3 нормальные силы N, N. И силы трения F «Fj.- Торцевая сила Q уравновешивается суммой сил трения . Поэтому заклинивающие элементы сцеплены с направ- ляющей обоймы жестко, неподвижно, и с тем большей надежностью, чем меньше коэффициент трения при.расчете и проектировании муфты. MexaHiTsM работает аналогично и в том случае.
30
35
если ведущ гм ее звеном является обойма вращающаяся по часовой стрелке.
При вращении звездочки 2 по часо7 40 вой стрелке механизм расклинивается и вращение на обойму 3 не /тередает- ся. Обойма 3 находится в покое или может вращаться,со скоростью, меньшей скорости вращения, звездочки. За- 45 клининающие элементы 4 вращаются вместе со звездочкой с помощью пружин 14. Звездочка 2 имеет свободный ход относительно обоймы 3 с небольшим трением, обусловленным действием 50 пружин 14.
Центробежные силы заклинивающих элементов 4 могут восприниматься кольцом 17 и на обойму 3 не пере- .даются. Это позволяет исключить 55 износ поверхности 11 обоймы и по- (Верхпостей 12 заклинивающихся эле- eнтoв ц исключить те потери мощности при свободном ходе, которые обусловлены действием центробежных
йл-инерции.
При вращении звездочки 2 по часовой стрелке муфта работает, как.вариатор , если валы звездочки и обоймы имеют несоосность. При этом клиниться может только тот заклинивающий элемент, который може.Т сообщать ведомому элементу наибольшую скорость вращения. Все .остальные заклинивающие элементы.свободно проскальзывают в направляющей 5. После
поворота ведущего вала на некоторый угол заклиненный заклинивающий элемент расклинивается в направляющей 5 и Перестает передавать вращение. Вместо него автоматически -заклинивается в направляющей следующий зшашнивающий элемент и передает вращение. Механизм работает в режиме ускорителя, т. е. ведомый вал вращается быстрее ведущего вала.
fi-fi .
- ,
1лз1--
fl 2Q
Фие..
0
15
20
Для изменения частоты вращения изменяют величину.нёсросности валов. Для этого вращают рукоятку 26 управления. При этом изменяется величина -несоосности, валов и угловая скорость, ведомого вала при постоянной частоте вращения ведущего вала.
Некоторый износ рабочих поверх- ностей 9 и 10 направляющей 5 обоймы и заклинивающих элементов А может происходить при заклинивании - и расклинивании механизма. В предлагаемом механизме влияние этого износа на его работоспособность мол1- но исключить, заменив регулир овоч- ные прокладки 13 .(круглой формы, стальные в виде тонких дисков) или подтянув болты 7 при очередном техническом обслуживании муфты или при ремонте..
в-в
Фиг.З
f-eziZZZZZZ
/5
V/////7/,
v
ts
TZZZZTZT,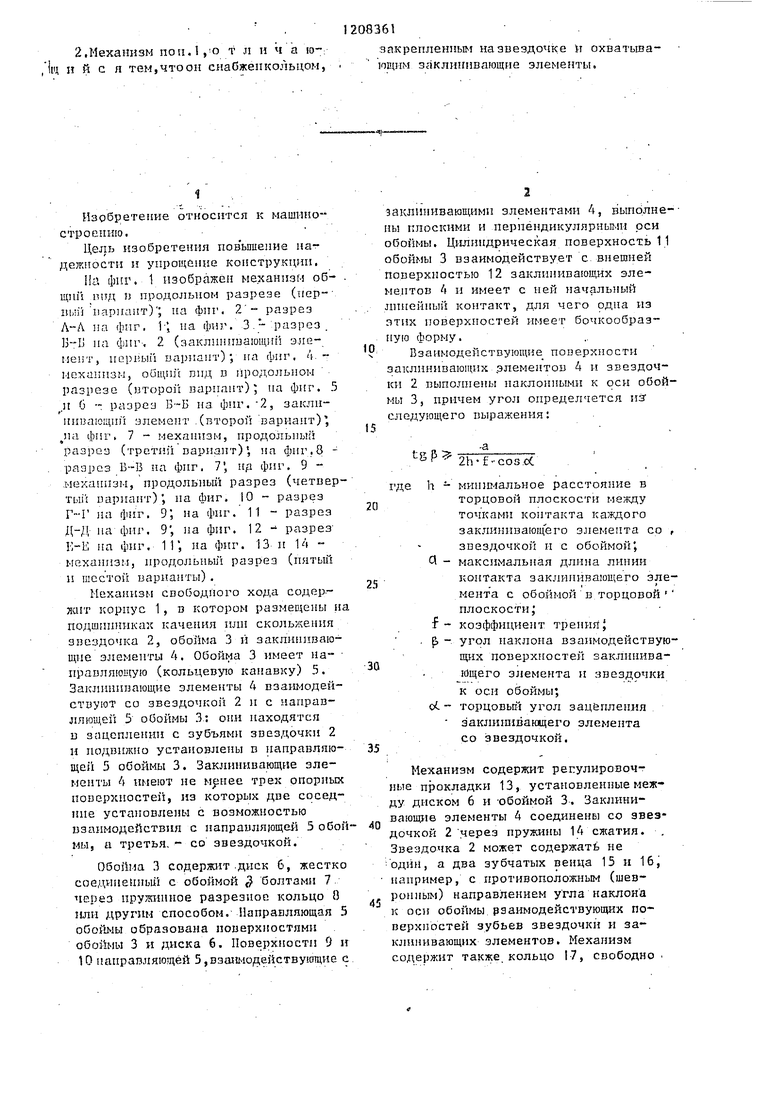


| название | год | авторы | номер документа |
|---|---|---|---|
| Вариатор Н.П.Ефимова | 1981 |
|
SU1199674A1 |
| Вариатор Н.П.Ефимова | 1986 |
|
SU1514995A2 |
| ЗУБЧАТАЯ МУФТА | 2012 |
|
RU2505720C1 |
| Реверсивная муфта свободного хода | 1991 |
|
SU1809202A1 |
| ЗУБЧАТАЯ МУФТА | 2011 |
|
RU2463494C1 |
| Измеритель крутящего момента | 1976 |
|
SU696313A1 |
| Вариатор Н.П.Ефимова | 1989 |
|
SU1698549A2 |
| Муфта свободного хода с принудительным переключением режимов | 1989 |
|
SU1684554A1 |
| Предохранительная фрикционная муфта | 1982 |
|
SU1059308A1 |
| Муфта свободного хода | 1989 |
|
SU1732060A1 |


1. Механизм, свободного хода, содержащий звездочку, охватывающую ее обойму с направляющими и заклинивающие элементы, установленные D направляющих обоймы с возможностью взаимодействия со звездочкой, о т - л и ч а ю 1д и и с я тем, что, с целью повышения надежности и упрощения конструкции, поверхности контакта заклинивающих элементов со звездочкой выполнены наклонными к оси муфты под углом, определяемым из выражения Ц tS Р . 217ГГ cos сс где h - минимальное расстояние в торцовой плоскости между точками контакта каждого заклинивающего элемента со звездочкой и обоймой , Л - максимальная длина линии контакта заклинивающего элемента с обоймой в торцовой плоскости - коэффициент трения; ,оС - торцовый угол зацепления заклинивающего элемента со звездочкой. ю О со | -Ч:Ь: :У: Ф//г/ 
5-5
ФигЛ
6-5
Фив, 5
Фиг.В
У////////////Л
S
Hiuz.u
У
2
Фиг. 9
:
a-/
I
23 -25
Й
M
XXX/V
fe w
Фиг. 11
22
Е-Е
V
т
Фиг. 12
Редактор Л.Пчелинскап
Составитель Л.Атрушкевич
Техред Ж.Кастелевот Корректор В.Синицкая
Заказ 230/48
Тираж 880Подписное
ВНИИПИ Государственного, комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ПШ1 Патент, г. Ужгород, ул. Проектная, 4
| СПОСОБ ПОЛУЧЕНИЯ ГЛИЦЕРОЛОКСИДАЗЫ | 1995 |
|
RU2117702C1 |
