1
Изобретение относится к устройствам для перемещения рук роботов и может быть использовано при разработке конструкций манипуляторов промыш ленных роботов.
Цель изобретения -расширение функциональных возможностей манипулятора путем расширения рабочей зоны.
На фиг. I изображено устройство
при помощи вин Говьк механизмов 17 и 18 1см. фиг, 2).
Устройство работает следующим образом.
Звено 2 при вращении кривошипов относительно осей звеньев I и 2 с помощью двигателей 6 и 7 участвует одновременно в двух движениях: вместе с осью, проходящей через оси
относительного поворота звеньев мани-- Ю двигателей, и вокруг этой оси. Звено
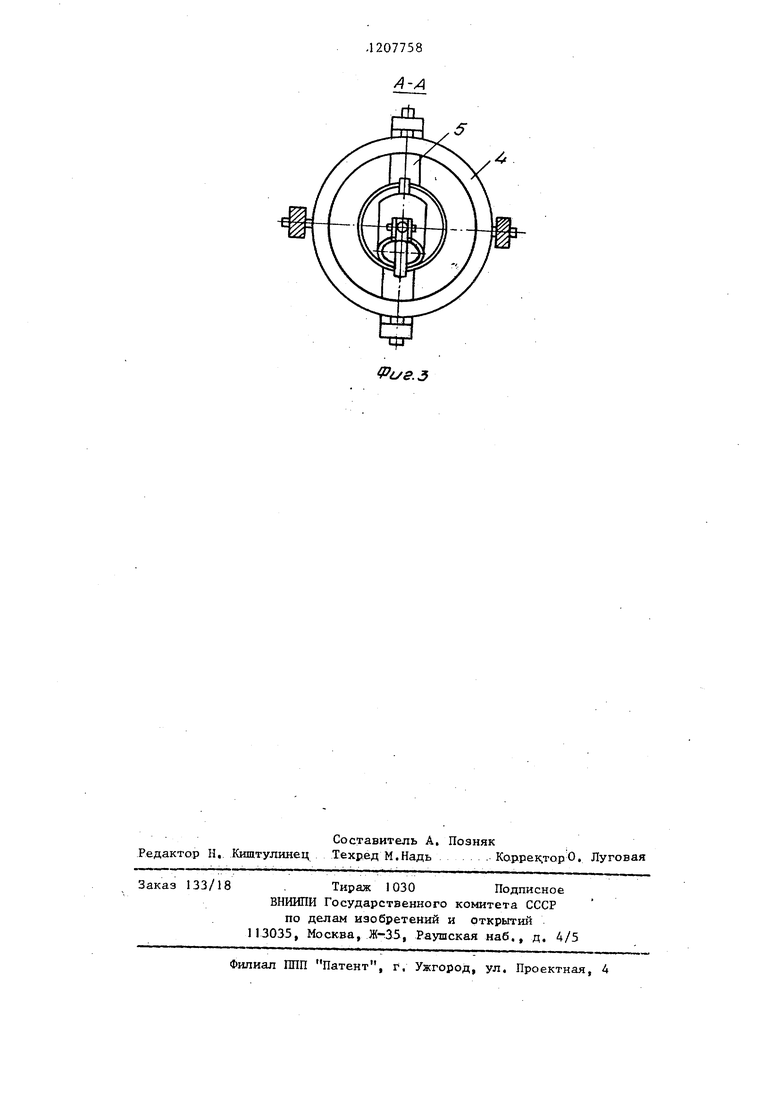
пулятора;, на фиг. 2 - то же, второй вариант исполнения; на фиг..З - разрез А-А на фиг, 2.
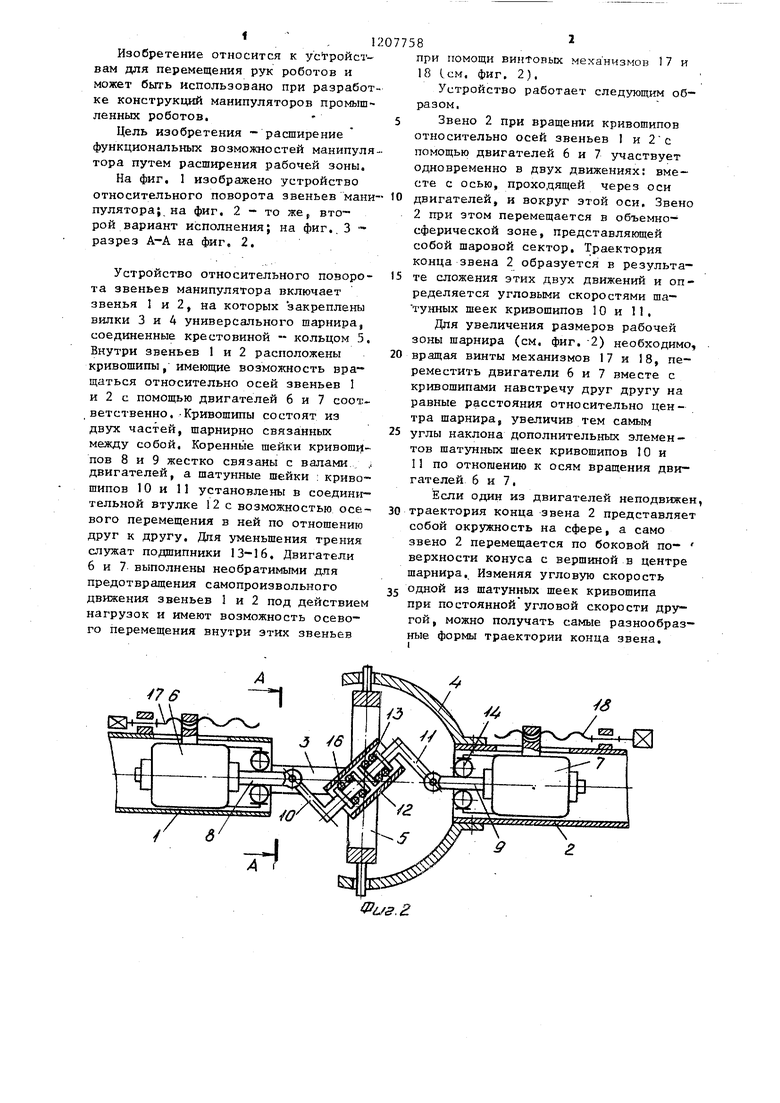
Устройство относительного поворота звеньев манипулятора включает звенья 1 и 2, ма которых закреплены вилки 3 и А универсального шарнира, соединенные крестовиной - кольцом 5. Внутри звеньев 1 и 2 расположены кривошипы, имеющие возможность вращаться относительно осей звеньев 1 и 2 с помощью двигателей б и 7 соответственно. -Кривошипы состоят из двух частей, шарнирно связанных между собой. Коренные шейки кривош - пов 8 и 9 жестко связаны с валами ,. двигателей, а шатунные шейки : кривошипов 10 и 11 установлены в соединительной втулке 12 с возможностью осе вого перемещения в ней по отношению друг к другу. Дпя уменьшения трения служат подшипники 13-16. Двигатели 6 и 7 выполнены необратимыми для предотвращения самопроизвольного движения звеньев 1 и 2 под действием нагрузок и имеют возможность осевого перемещения внутри этих звеньев
2 при этом перемещается в объемно- сферической зоне. Представляющей собой шаровой сектор. Траектория конца звена 2 образуется в результа- 15 те сложения этих двух движений и определяется угловыми скоростями ша- ТУ.ННЫХ шеек кривошипов 10 и 11.
Для увеличения размеров рабочей зоны шарнира (см. фиг. -2) необходимо 20 вращая винты механизмов 17 и 18, переместить двигатели 6 и 7 вместе с кривошипами навстречу друг другу на равные расстояния относительно цен- тра шарнира, увеличив тем самым 25 углы наклона дополнительных элементов шатунньк шеек кривошипов 10 и 11 по отношению к осям вращения двигателей 6 и 7.
Если один из двигателей неподвиже 30 траектория конца звена 2 представляе собой окружность на сфере, а само звено 2 перемещается по боковой по- верхности конуса с вершиной в центре шарнира. Изменяя угловую скорость 35 одной из шатунных шеек кривошипа
при постоянной угловой скорости другой, можно получать самые разнообраз ные формы траектории конца звена.
при помощи вин Говьк механизмов 17 и 18 1см. фиг, 2).
Устройство работает следующим образом.
Звено 2 при вращении кривошипов относительно осей звеньев I и 2 с помощью двигателей 6 и 7 участвует одновременно в двух движениях: вместе с осью, проходящей через оси
двигателей, и вокруг этой оси. Звено
2 при этом перемещается в объемно- сферической зоне. Представляющей собой шаровой сектор. Траектория конца звена 2 образуется в результа- 5 те сложения этих двух движений и определяется угловыми скоростями ша- ТУ.ННЫХ шеек кривошипов 10 и 11.
Для увеличения размеров рабочей зоны шарнира (см. фиг. -2) необходимо, 0 вращая винты механизмов 17 и 18, переместить двигатели 6 и 7 вместе с кривошипами навстречу друг другу на равные расстояния относительно цен- тра шарнира, увеличив тем самым 5 углы наклона дополнительных элементов шатунньк шеек кривошипов 10 и 11 по отношению к осям вращения двигателей 6 и 7.
Если один из двигателей неподвижен, 30 траектория конца звена 2 представляет собой окружность на сфере, а само звено 2 перемещается по боковой по- верхности конуса с вершиной в центре шарнира. Изменяя угловую скорость 35 одной из шатунных шеек кривошипа
при постоянной угловой скорости другой, можно получать самые разнообразные формы траектории конца звена.
/J
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1988 |
|
SU1502300A1 |
| ИНЕРЦИОННЫЙ ТРАНСФОРМАТОР МАТВЕЕВА | 2012 |
|
RU2526729C2 |
| Механизм преобразования вращательного движения в возвратно-поступательное | 1986 |
|
SU1379533A1 |
| Направляющий механизм | 1983 |
|
SU1116246A1 |
| Грейферный механизм | 1988 |
|
SU1529163A1 |
| Половонабиватель зерноуборочного комбайна | 1981 |
|
SU986336A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2009 |
|
RU2441994C2 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| Манипулятор | 1988 |
|
SU1636204A1 |

Составитель А. Позняк Редактор Н, Киштулинец Техред М.НадьKoppei TopO. Луговая
133/18
Тираж 1030 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-:35, Раушская наб., д, 4/5
Филиал ППП Патент, г, Ужгород, ул. Проектная, 4
| Устройство перемещения руки робота | 1980 |
|
SU905065A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
