ранстве. По сигналу от системы программного управления включается соответствующий привод. При выдвиже- нии штока 22 гидроцилиндра 21 кривошип 3 двигается против часовой стрелки и поворачивает в том же направлении коромысло 5 и шатун 4. Последний в свою очередь с помощью зубчатого колеса 8 поворачивает зубчатые колеса 9, 10 с жестко связанными с ними рычагами 11, 12. Длины звеньев и передаточные отношения зуб
чатых зацеплений подобраны так, что при движении звеньев манипулятора центры шарниров 16 и 17 перемещаются по прямой, проходящей через центр вращения кривошипа 3. Таким образом, обеспечивается возвратное прямолинейно-поступательное движение платформы 2. Для изменения положения траектории движения платформы 2 зубчатое колесо 8 перемещается относительно шатуна 4 посредством гидроцилиндра 18. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЫЧАЖНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ НОГИ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2402450C2 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| Горная машина | 1986 |
|
SU1448041A1 |
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ (2 ВАРИАНТА) | 2004 |
|
RU2281352C1 |
| Механизм транспортировки материала на швейной машине | 1983 |
|
SU1208112A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Механизм преобразования вращательного движения в возвратно-поступательное | 1985 |
|
SU1298458A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| "Устройство для шлифования гнутых деталей из древесины "Адзура" | 1990 |
|
SU1776223A3 |
Изобретение относится к машино- строению, а именно к манипуляторам с поступательно движущейся механической рукой, предназначенным для механизации и автоматизации вспомогательных технологических операций. Целью изобретения является расширение технологических возможностей за счет обеспечения изменения положения траектории движения платформы в простС5 СО OS ND О Јь
Изобретение относится к машиностроению, а именно к манипуляторам с поступательно движущейся механической рукой, предназначенным для механизации и автоматизации вспомогательных технологических операций.
Целью изобретения является расши- рение технологических возможностей за счет обеспечения возможности изменения положения траектории движения платформы в пространстве.
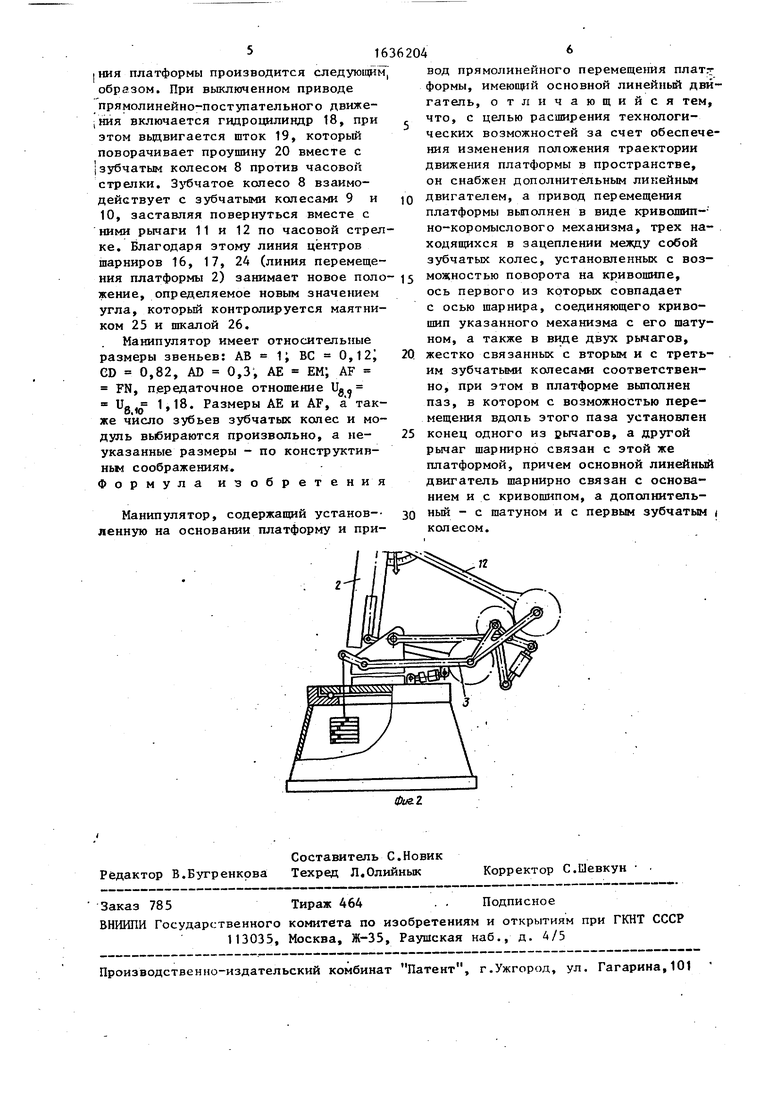
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - то же, в сложенном положении.
Манипулятор содержит поворот.ное основание 1, на котором установлена платформа 2 с приводом ее пер смещени включающим кривошип 3, шатун 4 и коромысло 5 кривошипно-коромыслового механизма, при этом в платформе 2 выполнен паз 6, в котором установлен ролик 7. Привод включает также три находящихся в зацеплении зубчатых колеса 8-10 и два рычага 11 и 12.
Все зубчатые колеса установлены с возможностью поворота на кривошипе 3, в подшипниках 13-15, при этом оси зубчатого колеса 8 и шарнира, связывающего кривошип 3 с шатуном 4 совпадают, а рычаги 11 и 12 одним концом скреплены соответственно с зубчатыми колесами 9 и 10, а другим концом с помощью шарниров 16 и 17 связаны - первый с роликом 7, а второй - с платформой 2.
Между шатуном 4 и зубчатым колесом 8 установлен дополнительный линейный двигатель, выполненный, например, в виде гидроцилиндра 18 со штоком 19, которые шарнирно связаны соответственно с шатуном 4 и
0
5
0
5
0
5
0
5
проушиной 20, закрепленной на зубчатом колесе 8. Этот привод предназначен для изменения положения траектории прямолинейного движения платформы 2 в плоскости этого движения путем изменения положения шатуна 4 относительного зубчатого колеса 8. Основной линейный двигатель представляет собой гидроцилиндр 21, корпус которого шарнирно связан с поворотным основанием 1, а шток 22 - с кривошипом 3, на котором установлен противовес 23 для уравновешивания веса подвижных звеньев манипулятора.
Кривошип 3 связан с основанием 1 шарниром 24, а угол наклона платформы контролируется маятником 25 с помощью шкалы 26.
Манипулятор работает следующим образом.
По сигналу программного управления включается соответствующий привод, например гидроцилиндр 21.
При выдвижении штока 22 гидроцилиндра 21 кривошип 3 двигается против часовой стрелки и поворачивает в том же направлении коромысло 5 и шатун 4. Последний в свою очередь с помощью зубчатого колеса 8 поворачивает зубчатые колеса 9 и 10 с жестко связанными с ними рычагами 11 и 12. Длины звеньев и передаточные отношения зубчатых зацеплений подобраны таким образом, что при движении звеньев манипулятора центры шарниров 16 и 17 перемещаются по прямой, проходящей через ось шарнира 24. Таким образом обеспечивается возвратное . прямолинейно-поступательное движение платформы 2. Изменение направления прямолинейно-поступательного движе72
/
| Кожевников С.Н | |||
| и др | |||
| Справоч- |ное пособие | |||
| Механизмы | |||
| - М.: Машиностроение, 1976, с | |||
| Способ получения бензидиновых оснований | 1921 |
|
SU116A1 |
