t
Изобретение относится к грузоподъемным устройствам и может быть использовано для дистанционного захвата и трелевки деревьев.
Цель изобретения - повышение производительности захвата деревьев.
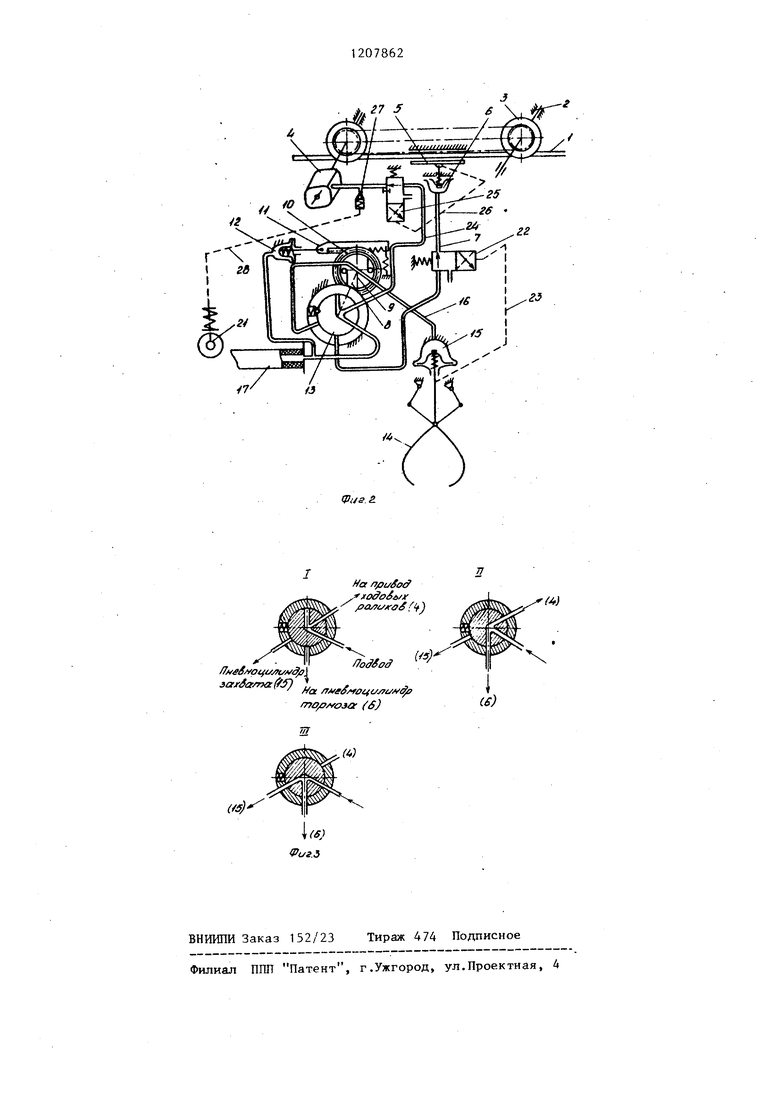
На фиг, 1 схематически показана канатная система грузозахватным устройством; на фиг. 2 - схема грузозахватного устройства; на фиг. 3 - схема работы радиального золотника управления.
Грузозахватное устройство, навешиваемое на несущий канат 1, состоит из корпуса 2, в котором установлены ходовые ролики 3 с приводом 4, тормозная система, состоящая из тормоза 5, пневмоцилиндра 6 и пневмома- гистрали 7 тормоза 5. В корпусе 2 установлено управляющее устройство, состоящее из вала 8, на котором экспериментально посажен ротор муфты 9 обгона, корпус которой совмещен с шестерней 10, находящейся в зацеплении с подпружиненной зубчатой рейкой 11, шарнирно связанной с пневмо- цилиндром управления 12. Управляющее устройство связано посредством вала 8 с ротором радиального золотника 13 управления. На корпусе 2 установлен захват 14, имеющий привод от пневмоцилиндра 15, захвата 14, связанного с радиальным золотником управления пневмомагистралью 16 захвата 14. С корпусом 2 одним концом соединен гиб кий пневматический тяговый орган 17, который непосредственно соединен с ротором радиального золотника 13 управления, а другрй конец гибкого пневматического тягового органа соединен через тяговый барабан 18 с пультом управления 19 и компрессо- ром 20. На гибкий пневматический тяговый орган 17 опирается подпружиненный ролик 21, установленный в корпусе 2. В пневмомагистрали 7 тормоза 5 установлен разгрузочный золотник 22, соединенный тягой 23 с штоком пневмоцилиндра 15 захвата 14, а в пневмомагистрали 24 привода 4 ходовых роликов 3 установлены разгрузочный золотник 25, связанный тягой 26 с штоком пневмоцилиндра 6 тормоза 5, и предохранительный клапан 27, связанный тягой 28 с подпружиненным роликом 21.
Число зубьев на шестерне 10 и на зубчатой рейке 11 подобрано таким
2078622
образом, что за три хода зубчатой рейки 11 шестерня 10 и ротор муфты обгона 9 вместе с валом 8 и ротором радиального золотника 13 управления
5 делают один оборот, а угол поворота ротора радиального золотника 13 управления за каждый ход зубчатой рейки 11 различный и определен эксцентриситетом ротора муфты 9
10 обгона. Сверления, выполненные в
корпусе радиального золотника ynpas- .ления, расположены так, что за три хода зубчатой рейки 11 гибкий пневматический тяговьй .орган 17 после 5 довательно соединяет подвод воздуха с пневмомагистралью 24 привода 4, ходовых роликов 3, с пневмомагистра- лями 24.и 7, привода 4, ходовых роликов 3 н тормоза 5, пневмомагистра2Q лями 7 и 16 тормоза 5 и захвата 14, а ротор радиального золотника 13 управления фиксируется в каждом положении.
25 Грузозахватное устройство работает следующим образом.
Воздух от компрессора 20 подается через пульт управления 19 в гибкий пневматический тяговый орган 17.
2Q Воздух одновременно попадает в радиальный золотник 13 управления и в пневмоцилиндр 12 управления. Шток пневмоцилиндра 12 управления перемещается, сжимая пружину (не обозначена), и перемещает зубчатую рейку 11, которая поворачивает шестерню 10, совмещенную с корпусом муфты 9 обгона, а ротор муфты 9 обгона, находясь в зацеплении с корпусом муфты обгона, поворачивает вал 8, соединенный с ротором радиального золотника 13 управления и, поворачиваясь, занимает положение 1 (фиг. 3), соединяя подвод воздуха с пневмомагистралью 24 ходовых роликов 3. В привод 4 поступает воздух по пневмомагистрали 24 через разгр1узочный золотник 25 и предохранительный клапан 27, и ходовые ролики 3 под воздействием крутящего
5 момента, создаваемого приводом 4, перемещают грузозахватное устройство по несущему канату 1.
Одновременно с перемещением грузозахватного устройства разматы55 вается с барабана 18 и вытягивается вслед за грузозахватным устройством гибкий пневматический тяговый орган 17, натяжением которого создает35
40
Э
ся необходимое давление воздуха в приводе 4 посредством предохранительного клапана 27, связанного тягой 28 с подпружиненным роликом 21, опирающимся на гибкий пневматический тяговый орган 17.
При достижении нужного положения грузозахватного устройства вдоль несущего каната 1 оператор пультом управления 19 отключает подвод воздуха и снижает давление в пневмосистеме до такой величины, что шток пневмоцилиндра 12 под действием пружины возвращается в исходное положение, вытягивая.за собой рейку 11, которая поворачивает шестерню 10, совмещенную с корпусом муфты 9 обгона, а ротор радиального золотника 13 совместно с ротором муфты 9 обгона удерживается в положении 1.
Затем оператор вновь подает воздух по гибкому пневматическому тяговому органу 17 к грузозахватному устройству и пневмоцилиндр 12 управления, толкая зубчатую рейку 11, поворачивает через шестерню 10, совмещенную с корпусом муфты 9 обгона, ротор муфты 9 обгона, вал 8 и ротор радиального золотника 13 управления, который занимает положение П. Воздух подается через радиальный золотник управления в пневмомагистраль 24 привода 4, ходовых роликов 3 и в пневмомагистраль 7 тормоза 5. Пневмоцилиндр 6 прижимает тормоз 5 к несущему канату 1 и удерживает грузозахватное устройство на несущем канате 1. Одновременно шток пневмоцилиндра 6 торйоза 5 через тягу 26 перемещает разгрузочный золотник 25, который запирает пневмомагистраль 24 и соединяет привод 4 с атмосферой.
Оператор опускает грузозахватное устройство на лежащее дерево и отсоединяет при помощи пульта управле07862
ния 19 подвод воздуха к грузозахватному устройству, а затем вновь попадает воздух к грузозахватному устройству. Одновременно с подачей воздуха
5 пневмоцилиндр 12 управления поворачивает ротор радиального золотника 13 управления, который занимает положение Ш (фиг. 3). Воздух через радиальный золотник управления, через
10 соответствующие пневмомагистрали подается в пневмоцилиндр 6 тормоза 5 и пневмоцилиндр 15 захвата 14. Захват 14 зажимает дерево одновременно с перемещением штока пневмоцилинд15 ра 15, компрессор 20 посредством тяги 23 перекрывает пневмомагистраль 7 тормоза 5, соединяя пневмоцилиндр 6 тормоза 5 с атмосферой, и грузозахватное устройство растормаживает20 ся. Оператор включает привод барабана и пневматический тяговый орган 17, наматываясь на барабан 18, перемещает грузозахватное устройство вместе с зажатым в захвате 14 дере25 вом. В момент, когда скорость грузозахватного устройства под действием силы тяжести дерева начинает превышать скорость движения пневматического тягового органа 17,он провисает и
OQ подпружиненный ролик 21 через тягу 28 воздействует на предохранительный клапан 27, поднимая давление сброса воздуха через предохранительный клапан, а грузозахватное устройство затормаживается ходовыми роликами 3, соединенными с приводом 4. После доставки дерева на место складирования оператор отключает давление воздуха и дерево выпадает из захвата, а захват под действием пружины и
пневмоцилиндра 15 раскрывается. Подавая давление, оператор переводит
ротор радиального золотника 13 управления в положе«ие I (фиг. 3), и цикл повторяется.
г

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата, транспортирования и сброса груза | 1957 |
|
SU109522A1 |
| УСТРОЙСТВО для очистки РЕМИЗОК ТКАЦКИХ СТАНКОВ | 1970 |
|
SU271397A1 |
| Тормоз транспортного средства | 1982 |
|
SU1054159A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕДВИЖЕНИЯ ГРУЗА | 2001 |
|
RU2194005C2 |
| СПОСОБ И УСТРОЙСТВО ШКРАБАКОВ ДЛЯ ПРЕДОТВРАЩЕНИЯ ТРАВМАТИЗМА И ГИБЕЛИ ЛЮДЕЙ ПРИ НАЕЗДЕ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2303540C2 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2002 |
|
RU2208572C1 |
| СПОСОБ И УСТРОЙСТВО ШКРАБАКОВ ДЛЯ ПРЕДОТВРАЩЕНИЯ ТРАВМАТИЗМА И ГИБЕЛИ ЛЮДЕЙ ПРИ НАЕЗДЕ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2241614C1 |
| Устройство для перемещения вагонеток | 1987 |
|
SU1442446A1 |
| Пневматический привод, система и способ управления пневматическим приводом | 2019 |
|
RU2718382C1 |
| Транспортное устройство для сборочной автоматической линии | 1983 |
|
SU1110610A1 |

I
/J g oif cfoi °
3ajr a/y7a:(fS) ,,.
fftx /TMf6/ ot4a t A
то/ лгоза (6)
На /i/oufod pa f/fro fif
Л
ys)
(s)
| Патент США № 4164289, кл.212- 122 | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
