Изобретение относится к машиностроению и может быть ис.чользовано в MHOIO позиционном сборочном оборудовании.
Известно транспортное устройство ;ыя сборочной автоматической линии, содержащее установленный на приводной и натяжной звездочках вертикально замкнутый 1яговый орган с закрепленными на нем спутниками, подпружиненный фиксатор, и}1дексирующий механизм, привод с распреде.чительным валом и блок управления 1.
Однако при недоходе спутников до фиксатора, а следовательно, до рабочих позиций, возможно возникновение аварийных ситуа ций на оборудовании, работающем с данным транспортным устройством.
Целью изобретения является повышение надежности работы транспортного устройства за счет отключения привода при иедохол.е спутников до рабочих позиций.
Указанная цель достигается тем, что транспортное устройство для сборочной автоматической линии, содержащее установленный на приводной и натяжной звездочках вертикально замкнутый тяговый орган с закрепленными на нем спутника.ми, подпружиненный фиксатор, индексирующий механизм, привод с распределительным валом и блок управления, снабжено .механизмом контроля положения спутника, установленным в подпружиненно.м фиксаторе с возможностью взаимодействия с тяговым органо.м и связанным с блоком управления.
На фиг. 1 изображено устройство. обп1ий вид; на фиг. 2 - вид А на фи1. 1: на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 разрез В-В на фиг. 1; на фиг. 5 - вид Г на фиг. 4, при нижнем положении 1 одпружиненного фиксатора; на фиг. 6 - то же, при верхне.м положении подпружиненного фиксатора.
Транспортное устройство для сб(;р(.)чной автоматической линии содержит станину 1, привод 2, кинематически соединенный с ним распределительный вал 3, подпружиненный фиксатор 4, приводную 5 и натяжную 6 звездочки, огибаемые вертикально замкнутым тяговы.м органом 7, вер.хняя ветвь к;;торого со спутниками 8 разменгена в направляющих 9, и индексирующий механизм.
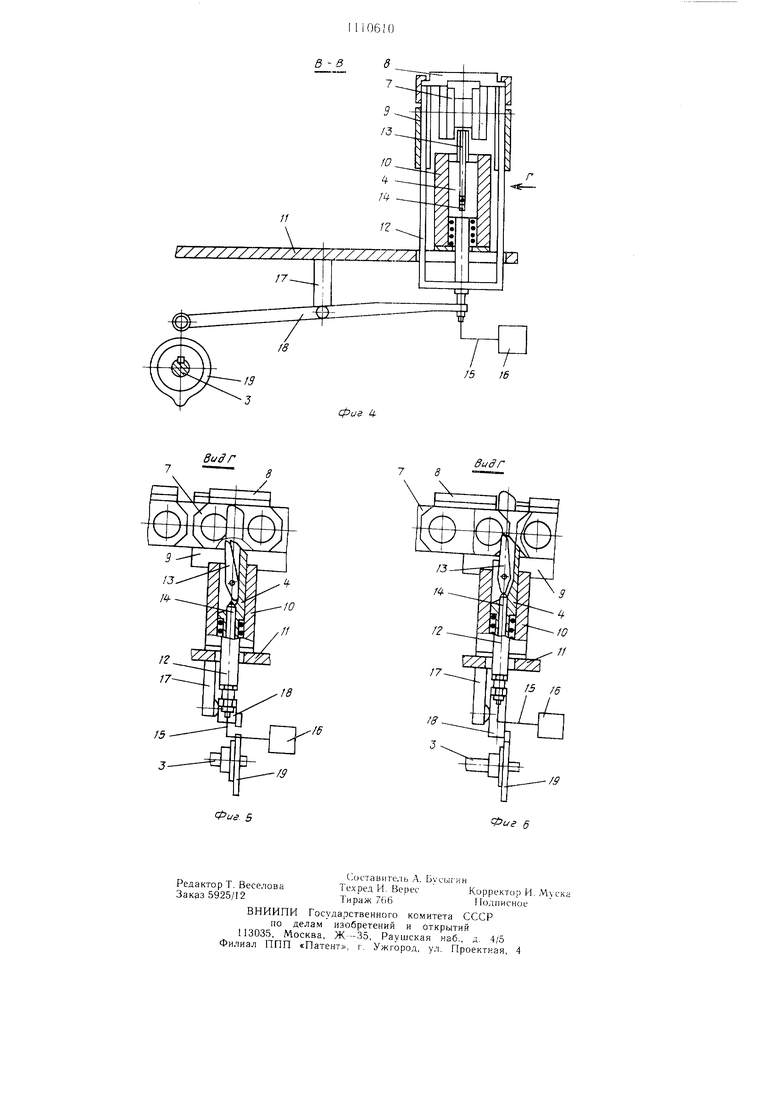
Подпружиненный фиксатор 4 установл1Ч) в направляюи.1.ей 10, закрепленной на ллите 11 станины 1, жестко соединен с П-образной планкой 12. Внутри него вмонтирован механизм контроля положения спутника. выполненный в виде подпружиненного дв-.плечего рычага 13 и датчика 14. Один конец рычага 13 взаимодействует с тяговым органом 7, а другой - с датчиком 14, выпол ненным в виде сопла заслонки, трубопроводом 15 соединенным с блоко.м управлении К; Под плитой 11 установлен кронштейн 17 с размещенным на нем рычагом 18, установленным с возможностью взаимодействия с кулачком 19 распределительного вала 3
к поднружиненны.м фиксатором 4, взаимодействуюп1,им с тигорл 1М органом 7.
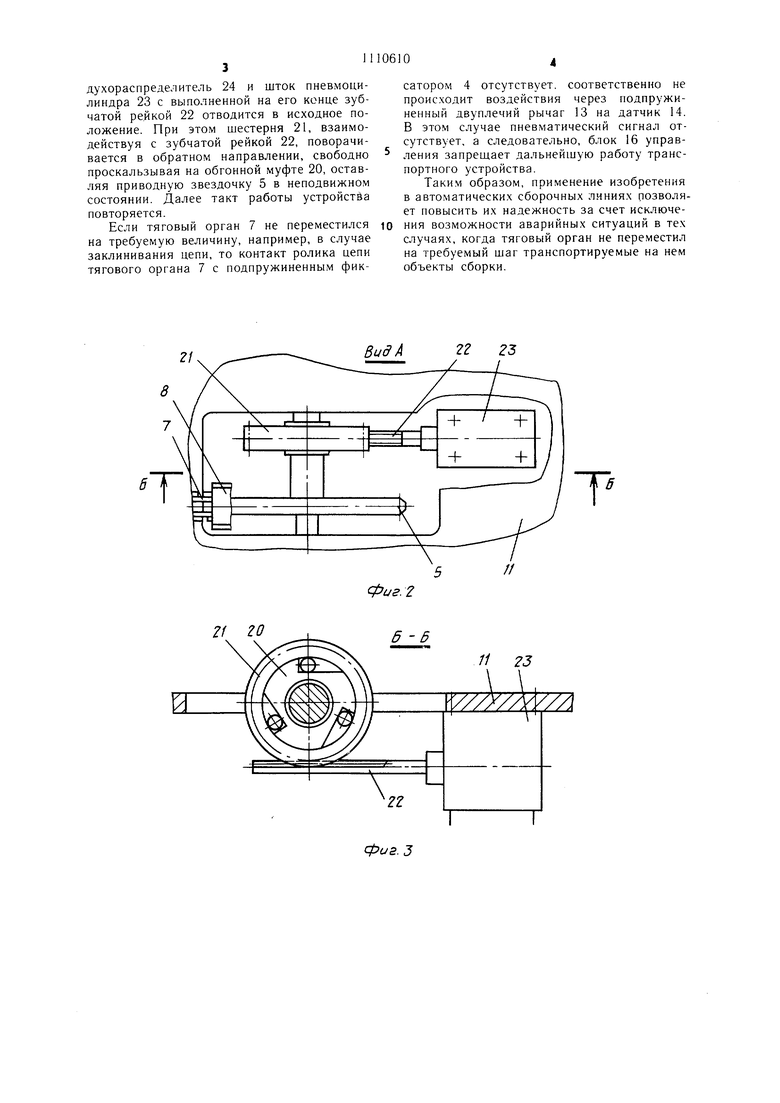
Индексирующий механиз.м выполнен в виде обгонной .муфты 20 с шестерней 21, смонтированной на валу приводной звездочки 5, зубчатой рейки 22, выполненной на штоке пневмоци. индра 23, кинематически связанного через воздухораспределитель 24 с распределительны.м валом 3 посредством ку.чачка 25.
Транспортное устройсгво автоматической
c6opt)4HOH ;1инии работает с; едуюп И.м обра зо.ч.
Ik.i сигналу с блок 16 управления привод 2 вран1ает ;аспрсделите.тьный вал 3. Воздухораспреде.гитель 24, взаимодействуя в такте )аботь; с кулачком 25, производит подачу сжатого воздуха в рабочую полость пнев.моцилиндра 23. Рейка 22, вынолненная па пггоке пнезмоцилиндра 23, взаи.модействуя с шестерней 21, через обгонную муфту 20 поворачивает на определенный угол приводную звездочку 5. Последняя, взаимодействуя с тяговым органом 7, перемещает ei( на iiiai
В начале цикла работы для обеспечения движения тя1ового органа 7 подпружиненный фиксато;) 4 с жестко соединенной П-об ;азной п..1анкой 12 с по.мощью ку;1ачка 19 и )ычага 18 от1 одятся в нижнее положение, тяговый opraii 7 свободно проходит над ними. В мо.мент начала движения тягового opiaiia 7 рычаг 18 сходит с кулачка 19, подпружиненный фиксатор 4 с жестко сое.циенной -образной планкой 12 поднимается я ущ.рается верхними концами П-образной п-ланки 12 в нижнюю поверхность движун1.егося спутника 8. После схода спутника 8 с П-образной планки 12 концы ее теряют контакт с нижней поверхностью спут:.|ика 8 и подпружиненный фиксатор 4 с жестко закрепленной П-образной планкой 12 поднимается в верхнее положение и устанав.ливается в промежутке .между спутниками 8. Тяговый орган 7, продолжая движение, .1 ирается ролико.м цепи тягового оГчина R подпружиненный фиксатс р 4, про;1..- иди-г остановка тягового opiana 7 и соотiH-icTBcnno :-;акре 1ленньгх на не.м спутников 8 ;; с).лснпом фиксированном по.ложении. ;1ри этом Р{.|,ЛИК тягового органа воздействует на верхнее плечо подпружиненного двун.лечеГО 13, нонорачивает его до плоскости конл-акга подпружипенногч) фиксато|)а 4 (фи1 ()). В этом |о;1ожении нижнее плечо двун.лечего подпружиненного рыча а ;3 воздействуе на датчик 14. который (})ормирует пнев.матнческий сипга: и подает cif) на блок 16 угфавления. При наличии п.невматического сшнали блок 16 управления разрешает перемещение транспортного устройства.
В конце рабочсг;; ля.чта трансгюртного устройства кулачок 25 переключает воздухораспределитель 24 и шток пневмоцилиндра 23 с выполненной на его конце зубчатой рейкой 22 отводится в исходное положение. При этом шестерня 21, взаимодействуя с зубчатой рейкой 22, поворачивается в обратном направлении, свободно проскальзывая на обгонной муфте 20, оставляя приводную звездочку 5 в неподвижном состоянии. Далее такт работы устройства повторяется.
Если тяговый орган 7 не переместился на требуемую величину, например, в случае заклинивания цепи, то контакт ролика цепи тягового органа 7 с подпружиненным фиксатором 4 отсутствует, соответственно не происходит воздействия через подпружиненный двуплечий рычаг 13 на датчик 14. В этом случае пневматический сигнал отсутствует, а следовательно, блок 16 управления запрещает дальнейшую работу транспортного устройства.
Таким образом, применение изобретения в автоматических сборочных линиях позволяет повысить их надежность за счет исключения возможности аварийных ситуаций в тех случаях, когда тяговый орган не переместил на требуемый шаг транспортируемые на нем объекты сборки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система для несинхронных автоматических линий | 1976 |
|
SU738835A1 |
| Транспортная система для несинхронных автоматических линий | 1982 |
|
SU1060420A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| Шаговый конвейер | 1973 |
|
SU557962A1 |
| Многопозиционный сборочный автомат | 1976 |
|
SU656798A1 |
| Многопозиционный сборочный автомат | 1982 |
|
SU1030139A1 |
| Автомат сборки внутренних звеньев втулочнороликовых цепей | 1981 |
|
SU958034A1 |
| Устройство Кривовязюка для отделения листа от стопы и подачи его в зону обработки | 1983 |
|
SU1133006A1 |
| Устройство для вырубки из листа заготовок,расположенных в шахматном порядке | 1979 |
|
SU839123A1 |
| Транспортное средство с перегружателем | 1986 |
|
SU1477588A1 |
ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ СБОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛИНИИ, содержащее установленный на приводной и натяжной звездочках вертикально замкнутый тяговый орган с закрепленными на нем спутниками, подпружиненный фиксатор, индексирующий механизм, привод с распределительным валом и блок управления, отличающееся тем, что, с целью повышения надежности работы устройства, оно снабжено механизмом контроля положения спутника, установленным в подпружиненном фиксаторе с возможностью взаимодействия с тяговым органом и связанным с блоком управления.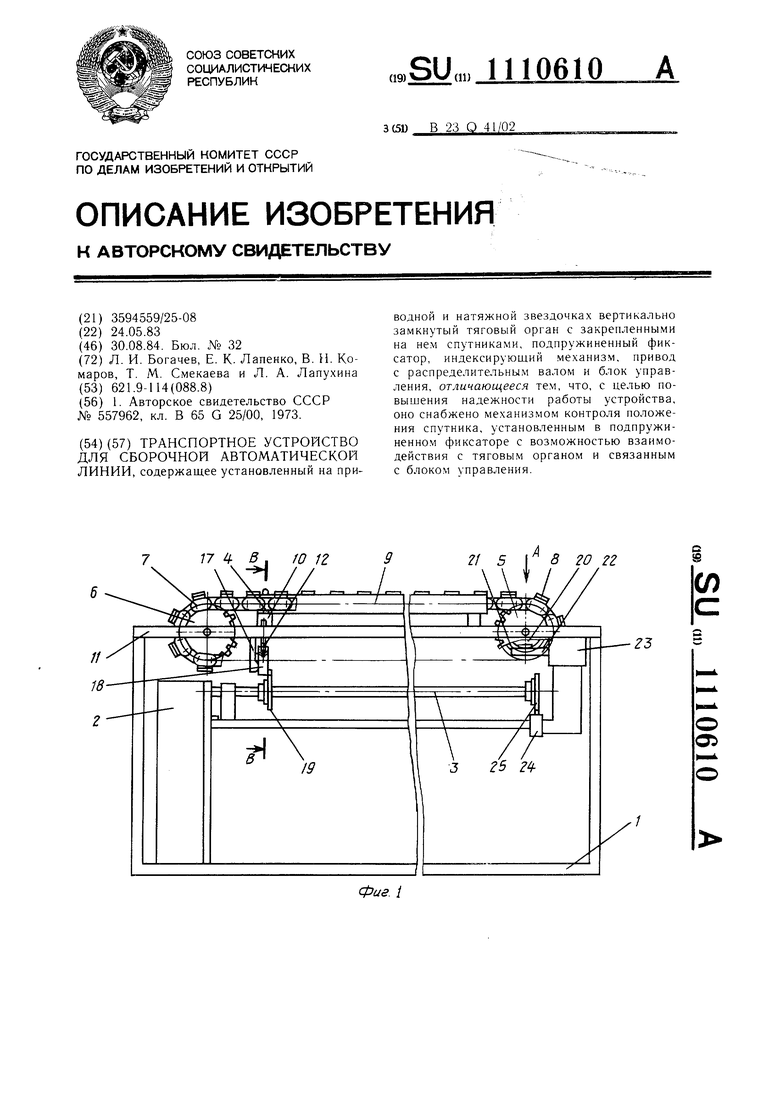
2f го Вид А 2Z
фиг. 2
6 -Б
// 23
фиг. 5 23
в -в
(pus 4
Л.
Ss
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шаговый конвейер | 1973 |
|
SU557962A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
