Изобретение относится к машиностроению и может быть использовано в приводах машин.
Цель изобретения - повышение передаваемой маховику энергии за счет того, что ведущее зв ено поочередно воздействует на плечи основных и дополнительных рычагов, связанных с пружинами, а маховику передается энергия . основных, так и дополнительных пружин.
На фиг. 1 изображен механизм для поддержания вращения маховика, общий вид на фиг. 2 - разрез А-А на фиг. 1; .на фиг. 3 - разрез Б-Б на фиг.1. .
Механизм для поддержания враш,ения маховика содержит корпус 1, установ- ленн ые в нем ведомое звено 2, основные рычат и 3, расположенные равномерно по окружности вокруг ведомого звена 2 на шарнирах 4, закрепленных на корпусе 1 , собачки 5, установленные на шарнирах 6 на каждом рычаге, храповое колесо 7, закрепленное на ведомом звене 2, ведущее звено
8,закрепленное на зубчатом колесе
9,кинематически связанном с зубчатым колесом 10, закрепленном на двигателе (на чертеже не показан). Кажды1-1 рычаг 3 связан с пружиной 11, размещенной на напр авляющей 12, которая в свою очередь закреплена посредством шарнира 13 на.корпусе
15
083732
1 . Механизм снабжен дополнительным храповым колесом 14, закрепленным на ведомом валу аксиально храповому колесу 7, дополнительными рычага- 5 ми 15 с пружинами 16, установленными на направляюшдх 17. Рычаги 15 и направляющие 17 установлены па шарнирах 18 и 19 закрепленных на корпусе 1 и повернутых относитель10 но шарниров 6 и 13 в одной и той же плоскости на угод, соответствующий длине сжатой пружины 11. Собач- кп 20 закреплены на дополнительных рычагах 15 на шарнирах 21. Ведомое звено 2 соединено с маховиком 22 посредством механизма 23 свободного хода.
Механизм работает следующим об-- разом. .
При вращении двигателем .колеса 10 вращается колесо 9. При этом ведущее звено 8 поочередно воздействует на рычаги 3 и 15, тем самым сжимая поочередно пружины 11 и 16.
25 Собачки 5 или 20 проскальзывают по зубьям храповых колес 7 и 14 до тех пор, пока конед рьиага 3 или 15 не перестанет взаимодействовать с ведущим звеном 8. После этого рычаг 3 или 15 под действием пружины 11 или 16 начин ает обратно двигаться, поворачивая храповые колеса 7 и 14, тем самым вращая ведомое 3 в е н о 2.
20
30
т ф„г г
13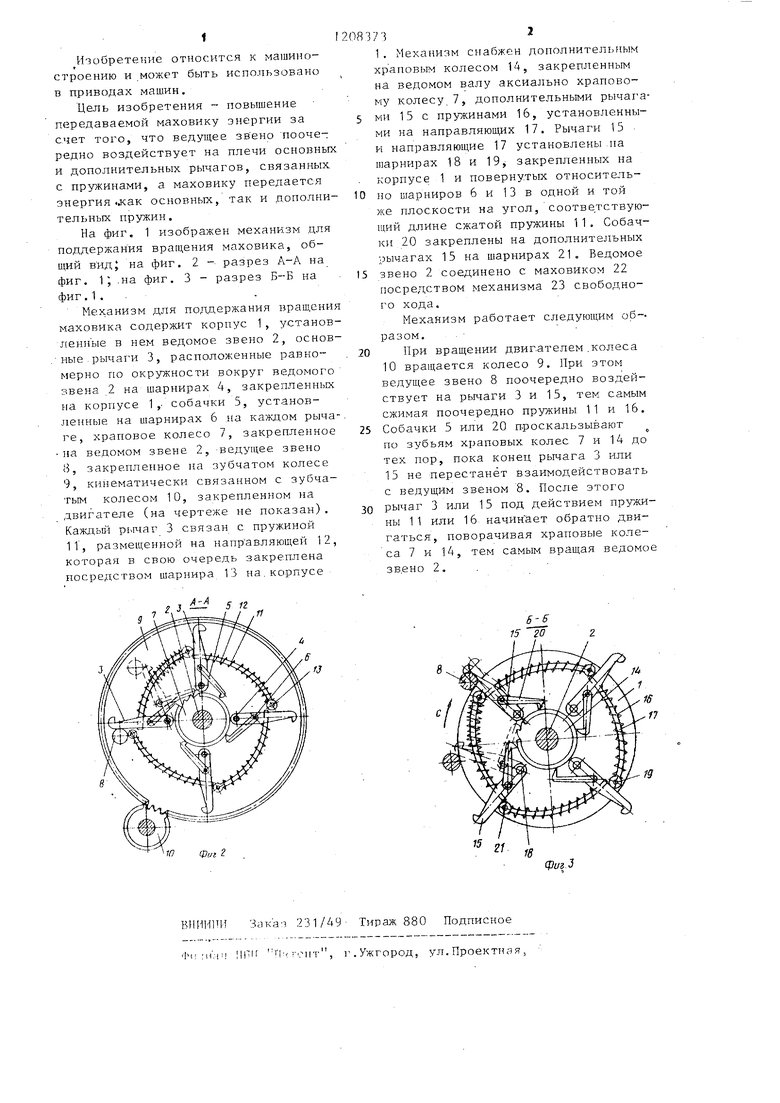
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для поддержания вращения маховика | 1986 |
|
SU1388619A1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2151323C1 |
| Автоматический привод | 1990 |
|
SU1772493A1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2153099C1 |
| ПРИВОД ВРАЩАЮЩЕГОСЯ КОНВЕЙЕРА АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 1999 |
|
RU2172457C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ НАТЯГИВАНИЯ И ЗАМЫКАНИЯ БАНДАЖНЫХ ЛЕНТ | 1994 |
|
RU2118277C1 |
| Привод стартера | 1985 |
|
SU1320491A1 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| Поворотно-стопорное устройство | 1988 |
|
SU1590754A1 |

ВНИИПИ Заказ 231/49- Тираж 880 Подписное 1 1 и .ч I ПРИ 1ч онт , Г.Ужгород, ул. Проектная ,
| Датчик уровня жидкости | 1974 |
|
SU497480A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Устройство для передачи механической энергии | 1978 |
|
SU1043394A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
