Изобретение относится к сельскому хозяйству для автоматического управления движением колесного трактора и может быть использовано при работе на склонах.
Цель изобретения - упрощение устройства и расширение его области применения.
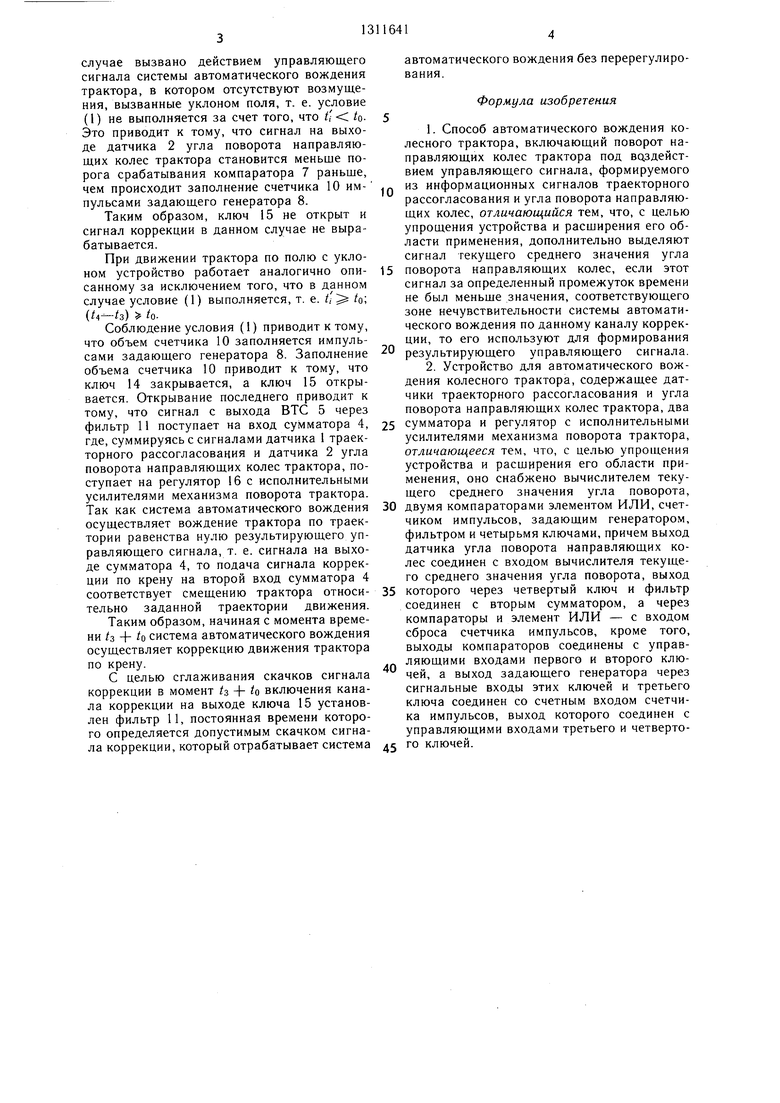
На фиг. 1 изображена функциональная схема устройства для автоматического вождения колесного трактора; на фиг. 2 - временная диаграмма выделения сигнала коррекции по крену.
В соответствии со способом автоматического вождения колесного трактора сигнал коррекции по крену выделяется при соблюдении условия
и,,и.
(1)
где Ua, Ua, величины сигналов текущего среднего значения датчика угла поворота направляющих колес трактора и зоны нечувствительности системы автоматического вождения по данному каналу соответственно; t - отрезок времени, равный 1, ti (,2,...), на котором соблюдаетсяусловие | t/J t/,,;
tQ - заданный промежуток времени, который отсчитывается от момента времени, при котором выполняется условие /„„.
Исходя из изложенного, для случая На., i сигнал коррекции по крену отсутствует, а результирующий управляющий сигнал формируется с использованием сигналов датчиков тракторного рассогласования и угла поворота направляющих колес трактора.
Для случая IL al б а,, /2 ) tu
сигнал коррекции выделяется и результирующий управляющий сигнал формируется с использованием не только сигналов датчиков траекторного рассогласования и угла поворота направляющих колес трактора, но и устройства по крену трактора.
Устройство автоматического вождения колесного трактора содержит датчик 1 траекторного рассогласования, датчик 2 угла поворота направляющих колес трактора, сумматоры 3 и 4, вычислитель 5 текущего среднего значения угла поворота (ВТС), компараторы б и 7, задающий генератор 8, элемент ИЛИ 9, счетчик 10 импульсов, фильтр 11, ключи 12-15 и регулятор 16 с исполнительными усилителями механизма поворота трактора. Выходы датчиков 1 и 2 соединены с входами сумматора 3, выход которого через сумматор 4 соединен с регулятором 16 с исполнительными усилителями механизма поворота трактора. Выход дат0
чика 2 угла поворота направляющих колес соединен также с ВТС 5, выход которого через компараторы 6 и 7, элемент ИЛИ 9 соединен с входом сброса счетчика 10 им- пульсов. Выход ВТС 5 через ключ 15 и фильтр 11 соединен с сумматором 4. Задающий генератор 8 соединен с сигнальными входами ключей 12 и 13, выходы которых соединены с сигнальными входами ключа 14. Выход последнего соединен со счетным входом счетчика 10 импульсов, выход которого соединен с входами управления ключей 14 и 15. Выходы компараторов 6 и 7 соединены с входами управления ключей 12 и 13.
5 Автоматическое вождение трактора осуществляется по траектории, определяемой равенством нулю управляющего сигнала, т. е. сигнала на выходе сумматора 4. Исходные состояния логических элементов устройства при сигнале датчика 2 угла поворота на0 нравляющих колес трактора, равном нулю, следующие: компараторы 6 и 7 не задействованы, счетчик 10 находится в исходном состоянии, ключи 12, 13 и 15 закрыты, а ключ 14 открыт.
5 При отсутствии уклона в процессе движения колесного трактора сигналы от датчика 1 траекторного рассогласования и датчика 2 угла поворота направляющих колес поступают на входы сумматора 3, где формируется управляющий сигнал, амплиту0 да и знак которого определяют величину и направление отклонения трактора относительно заданной трактории движения.
Данный сигнал через сумматор 4 воздействует на регулятор 16 с исполнительными усилителями механизма поворота трак5 тора, заставляя последний устремить управляющий сигнал к нулю за счет изменения угла поворота направляющих колес трактора и смещения трактора относительно базовой линии.
При движении трактора сигнал датчи ка 2 угла поворота направляющих колес через ВТС 5 поступает на компараторы 6 и 7. Причем последние настроены так, что один из них (например, компаратор 7) срабатывает при положительном значении
5 сигнала ВТС 5, а другой (компаратор 6) - при отрицательном значении этого сигнала. Если сигнал датчика 2 угла поворота направляющих колес трактора положительный и больще порога срабатывания компаратора, то срабатывает компаратор 7. Это при0 водит к тому, что элемент ИЛИ 9 вырабатывает сигнал, поступающий на вход сброса счетчика 10. Этот сигнал устанавливает счетчик 10 в исходное состояние. Срабатывание компаратора 7 открывает ключ 13 и импульсы задающего генератора 8 через от5 крытые ключи 13 и 14 поступают на счетный вход счетчика 10. Появление сигнала на выходе.-датчика 2 угла поворота направляющих колес трактора в данном
случае вызвано действием управляющего сигнала системы автоматического вождения трактора, в котором отсутствуют возмущения, вызванные уклоном поля, т. е. условие (1) не выполняется за счет того, что /, - to. Это приводит к тому, что сигнал на выходе датчика 2 угла поворота направляющих колес трактора становится меньше порога срабатывания компаратора 7 раньще, чем происходит заполнение счетчика 10 импульсами задающего генератора 8.
Таким образом, ключ 15 не открыт и сигнал коррекции в данном случае не вырабатывается.
При движении трактора по полю с уклоном устройство работает аналогично описанному за исключением того, что в данном случае условие (1) выполняется, т. е. /, о; m-ts) . to.
Соблюдение условия (1) приводит к тому, что объем счетчика 10 заполняется импульсами задающего генератора 8. Заполнение объема счетчика 10 приводит к тому, что ключ 14 закрывается, а ключ 15 открывается. Открывание последнего приводит к тому, что сигнал с выхода ВТС 5 через фильтр 11 поступает на вход сумматора 4, где, суммируясь с сигналами датчика 1 траек- торного рассогласования и датчика 2 угла поворота направляющих колес трактора, поступает на регулятор 16 с исполнительными усилителями механизма поворота трактора. Так как система автоматического вождения осуществляет вождение трактора по траектории равенства нулю результирующего управляющего сигнала, т. е. сигнала на выходе сумматора 4, то подача сигнала коррекции по крену на второй вход сумматора 4 соответствует смещению трактора относительно заданной траектории движения.
Таким образом, начиная с момента времени /3 + 0 система автоматического вождения осуществляет коррекцию движения трактора по крену.
С целью сглаживания скачков сигнала коррекции в момент з + to включения канала коррекции на выходе ключа 15 установлен фильтр 11, постоянная времени которого определяется допустимым скачком сигнала коррекции, который отрабатывает система
0
автоматического вождения без перерегулирования.
Формула изобретения
1.Способ автоматического вождения колесного трактора, включающий поворот направляющих колес трактора под вцздейст- вием управляющего сигнала, формируемого
Q из информационных сигналов траекторного рассогласования и угла поворота направляющих колес, отличающийся тем, что, с целью упрощения устройства и расширения его области применения, дополнительно выделяют сигнал текущего среднего значения угла
5 поворота направляющих колес, если этот сигнал за определенный промежуток времени не был меньще значения, соответствующего зоне нечувствительности системы автоматического вождения по данному каналу коррекции, то его используют для формирования результирующего управляющего сигнала.
2.Устройство для автоматического вождения колесного трактора, содержащее датчики траекторного рассогласования и угла поворота направляющих колес трактора, два
5 сумматора и регулятор с исполнительными усилителями механизма поворота трактора, отличающееся тем, что, с целью упрощения устройства и расширения его области применения, оно снабжено вычислителем текущего среднего значения угла поворота,
0 двумя компараторами элементом ИЛИ, счетчиком импульсов, задающим генератором, фильтром и четырьмя ключами, причем выход датчика угла поворота направляющих колес соединен с входом вычислителя текущего среднего значения угла поворота, выход
5 которого через четвертый ключ и фильтр соединен с вторым сумматором, а через компараторы и элемент ИЛИ - с входом сброса счетчика импульсов, кроме того, выходы компараторов соединены с управляющими входами первого и второго клю- чей, а выход задающего генератора через сигнальные входы этих ключей и третьего ключа соединен со счетным входом счетчика импульсов, выход которого соединен с управляющими входами третьего и четверто5 го ключей.
Фиг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство автоматического вождения колесных тракторов | 1986 |
|
SU1440375A1 |
| Устройство для автоматического вождения колесного трактора | 1984 |
|
SU1210685A1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Фотооптический датчик системы автоматического вождения мобильного агрегата | 1986 |
|
SU1423012A1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
Изобретение относится к сельскому хозяйству и может быть использовано при работе на склонах. Цель изобретения - упрощение устройства и расширение области его применения. Способ автоматического вождения колесного трактора включает поворот направляющих колес (НК), осуществляемый управляющим воздействием. Управляющий сигнал формируется из информационных сигналов траекторного рассогласования и угла поворота НК. Дополнительно выделяют сигнал текущего среднего значения угла поворота НК. Если этот сигнал за определенный промежуток времени не был меньще значения, соответствующего зоне нечувствительности системы автоматического вождения по данному каналу коррекции, то его используют для формирования результирующего управляющего воздействия. Устройство автоматического вождения колесного трактора содержит датчик 1 траекторного рассогласования, датчик 1 угла поворота НК трактора, сумматоры 3 и 4, вычислитель 5 текущего среднего значения угла поворота, компараторы 6 и 7, задающий генератор 8, элемент ИЛИ 9, счетчик 10 импульсов, фильтр 11, ключи 12-15 и регулятор 16 с исполнительными усилителями механизма поворота трактора. Вождение осуществляется по траектории, определяемой равенством нулю управляющего сигнала. При наличии уклона появляется сигнал на выходе датчика 2 угла поворота НК трактора, и логическая система коррекции вступает в действие. Осуществляется регулирование направления движения трактора. 2 с.п. ф-лы, 2 ил. Q оо Ci 4
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 0 |
|
SU312559A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
