О 00
«
ifuffi
114
Изобретение относится к сельскому хозяйству, а именно к автоматизации вождения колесных тракторов при выполнении технологической операции в растениеводстве,
Целью изобретения является повышение качества вождения.
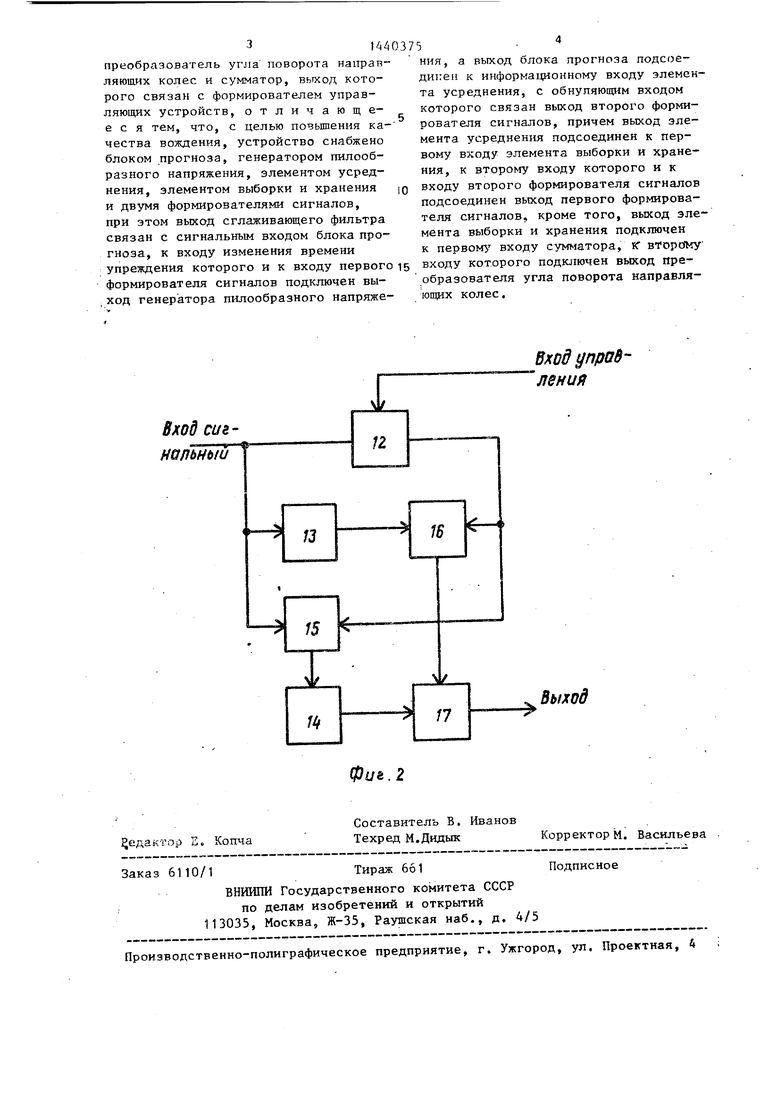
На фиг. 1 приведена функциональная схема устройства, на фиг, 2 - схема блока прогноза.
Устройство содержит преобразователь 1 траекторного рассогласования С механическим копирующим датчиком и преобразователь 2 угла поворота .направляющих колес, сглаживающей фильтр 3, блок 4 прогноза, элемент 5
вперед точки копирования системы автоматического вождения относительно выноса, обусловленного размерами механического копирующего датчика, ко- торьш определяется выражением
а
а + V (TI-T),
а - механический вынос точки копирования относительно кинематического центра трак- торг ,V - скорость движения трактора, TI - постоянная времени фильтра 3, Т - время упреждения блока 4 прогноза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Способ автоматического вождения колесного трактора и устройство для его осуществления | 1984 |
|
SU1311641A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для автоматического вождения колесного трактора | 1984 |
|
SU1210685A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1985 |
|
SU1336964A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1981 |
|
SU1001879A1 |
| Цифровой синтезатор функций | 1976 |
|
SU596977A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Фотооптический датчик системы автоматического вождения мобильного агрегата | 1986 |
|
SU1423012A1 |
Изобретение оФносится к сельско- .му хозяйству, а именно и автоматизации вождения колесных тракторов при вьшолнении технологической операции в растеневодстве. Целью изобретения является повышение качества вождения. При движении колесного трактора сигнал с выхода преобразователя траекторного рассогласования 1 поступает на сглаживающий фильтр 3, которьй отфильтровывает сигнал помехи. Далее блок прогноза 4 по сигналам траекторного рассогласования либо ликвидирует запаздывание, вносимое сглаживающим фильтром 3, либо вносит упреждение, что соответствует выносу вперед точки копирования системы автовождения. Генератор пилообразного напряжения 9 обеспечивает изменение электрического выноса копирующей точки. Формирователи 10 и 11 обеспечивают требуемый режим работы элемента усреднения 5 и элемента выборки и хранения 6 за счет формирования в заданные моменты времени со- g ответствующих импульсов управления. Сглаженный сигнал и сигнал с преобра- ГЛ зователя угла поворота направлякяцих колес суммируются в сумматоре 7, который управляет работой формирователя Q управляющих воздействий. 2 ил.
усреднения, элемент 6 выборки и хранения, су 1матор 7, формирователь 8 управляемых воздействий, генератор 9 пилообразного напряжения и первый 10 и второй 11, формирователи сигналов.
Блок 4 прогноза содержит апериодическое звено 12, два усилителя 13 и 14 и три сумматора 15-17.
Устройство работает следующим образом.
При движении колесного трактора на выходе преобразователя 1 появляется сигнал, пропорциональный траек- торному рассогласованию положения трактора относительно задающей базовой линии
При этом сигнал на выходе преобразователя 1 будет зашумлен помехами, обусловленными наличием различных неоднородностей на базовой линии в виде крупных комьев земли на дне борозды, осьшавтихся стенок профилированной поверхности и т.д. Влияние данных помех сглаживается фильтром 3, которьй однако вносит запаздывание в систему автоматического вождения, приводящее к ухудшению динамических характеристик трактора как объекта управления и, как следствие, к снижению качества вождения МТА.
Блок 4 прогноза по значению траекторного рассогласования в настоящий и предществующиё моменты времени ликвидирует запаздьшание вносимое сглаживающим фильтром 3 (при равенстве постоянной времени фильтра 3 и времени упреждения блока 4 прогноза) либо вносит упреждение (при вьшолнении условия, что время упреждения блока 4 прогноза больше постоянной времени фильтра 3). Последний случай соответствует электрическому выносу
0
5
0
5
0
5
Генератор 9 пилообразного напряжения обеспечивает изменение выноса копирующей точки в заданных пределах за счет изменения времени упреждения блока 4 прогноза. Кроме того генератор 9 вместе с формирователями 10 и 11 обеспечивает требуемый режим работы элементов 5 и 6 за счет формирования в заданные моменты времени соответствующих импульсов управления. Элемент 5 усредняет за период пилообразного напряжения генератора 9 значение Сигнала преобразователя 1, что обеспечивает сглаживание локальных искривлений базовой линии. Это среднее значение запоминается элементом 6 и сз мируется на сумматоре 7 вместе с сигналом преобразователя 2. Запись и хранение среднего значения сигнала преобразователя 1 осуществляется импульсом первого формирователя 10. Для устранения погрешности усреднения (интегрирования) обнуление элемента 5 осуществляется и fflyльcoм второго формирователя 11. Выходной сиг- гал сумматора 7, поступая на вход формирователя 8 управляющих воздействий обеспечивает отслеживание трактором базовой линии, поскольку система автоматического вождения осуществляет вождение трактора по траектории равенства нулю входного сигнала формировате,пя управляющих воздействий.
Формула изобретения
Устройство автоматического вождения колесных тракторов, содержащее преобразователь траекторного рассогласования с механическим копирующим датчиком и сглаживающим фапьтром.
преобразователь угла поворота направляющих колес и сумматор, выход которого связан с формирователем управляющих устройств, отличающееся тем, что, с целью повышения качества вождения, устройство снабжено блоком прогноза, генератором пилообразного напряжения, элементом усреднения, элементом выборки и хранения и двумя формирователями сигналов, при этом выход сглаживающего фильтра связан с сигнальным входом блока прогноза, к входу изменения времени упреждения которого и к входу первого формирователя сигналов подключен вы- , ход генератора пилообразного напряжеВход cuzиапьныи
ния, а выход блока прогноза подсоединен к информационному входу элемента усреднения, с обнуляюищм входом которого связан выход второго формирователя сигналов, причем выход элемента усреднения подсоединен к первому входу элемента выборки и хранения, к второму входу которого и к входу второго формирователя сигналов подсоединен вьгход первого формирователя сигналов, кроме того, выход элемента выборки и хранения подключен к первому входу сумматора, К Btopd ty входу которого подключен выход преобразователя угла поворота направляющих колес,
Вход управлений
Выход
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
