1
Изобретение относится к станкостроению, в частности к устройствам для управления механизмами подачи металлорежущих станков, и может быть использовано в токарных, сверлильных,, расточных, фрезерных и других станках.
Цель изобретения - упрощение конструкции путем объединения управления движениями ручного и механического, например, от электродвигателя перемещений.
На чертеже изображен устройство общий вид.
Вращающийся шпиндель I станка смонтирсгван внутри гильзы 2 9 иа- резанной на ее поверхности зубчатой рейкой, находящейся в зацеплении с щестерней 3, закрепленной на втулке 4. На торцах втулки 4 имеются, две полумуфты: ручного перемещения 5 и механического перемещения 6. Одна из полумуфт (5) закреплена на ползуне 7, который связан со ступицей 8 с помощью пшицевого вала, а другая (6) связана кинематически с помощью шлицевого вала с электродвигателем 9 привода подач. Ступица 8 снабжена поворотным диском 10, который может вращаться относительно оси 11. На поворотном диске 10 закреплена рукоятка 12 управления подачей, на конце которой находится кнопка 13 включения ускоренных перемещений шпинделя. Для.уравновешивания гильзы 2 служит устройство 14. На штанге 15, связанной посредством пальца 16 с кольцевым поводком, выпохшениым на поворотном диске 10, установлены вилки 17 и 18, служащие для переключения соответственно полумуфт 5 или 6. Толкатель 19 закреплен на ползуне 7 и воздействует на электрические контакты включения прямого и обратного направлений движения меха1етчес кой подачи через блок 20 згправления двигателем 9. Цилиндрический выступ 21 закреплен на ползуне 7 и монет перемещеаться по вырезам фигурной маски 22, установленной на неподвижном корпусе. Узкий участок (а) маски, разделяющий зону 5 управления ручными и зону & управления механическими подачами, имеет ширину, равную диаметру выступа 21, Зацеп 23 связан пружиной растяжения 24 с шарниром 25, установленным на неподвижном корпусе. На штанге 15
109962
расположена пружина сжатия 26, предназначенная для возвращения рукоятки 1 2 в положение механической подачи. Для угловой фиксации рукоятки
5 в положении включения прямой или обратной механической подачи на ползуне 7 установлен подпружиненный фиксатор 27 с возможностью взаимодействия с фиксирующими гнездами
10 28, расположенными на неподвижном корпусе.
Устройство работает следующим образом,
В исходном положении, показанном
15 на чертеже, рукоятка 12 под действием пружин 4 и 26 находится в положении управления механической подачи и расположена вертикально. Штанга 15, связанная с помощью пальца 16
20 с поворотным диском 10 рукоятки 12, находится в крайнем правом положении. При этом посредством, вилок 17 и 18 соответственно полумуфты 5 разомкнуты, полумуфты 6 сцеплены, осуществля25 ется кинематическая связь электродвигателя 9 со шпинделем 1.
При повороте рукоятки 12 вокруг продольной оси ползуна 7 толкатель 19 замыкает электрические контакты и через блок управления 20 включает электродвигатель 9, вращение которого посредством шестерни 3 и рейки преобразуется в механическую подачу гильзы 2 шпинделя 1. При повороте
35 рукоятки 12 по часовой стрелке включается подача шпинделя вверх; при повороте против часовой стрелки - вниз. Для получения ускоренной подачи шпинделя нажимают кнопку 13 ру коятки 12, в результате чего через блок 20 управления подается команда на включение повьш1енных оборотов электродвигателя. Жестко связанный с ползуном 7 цилиндрический выступ
21 поворачивается в ту же сторону, что и рукоятка в вырезах фигурной маски 22 в управления механическими подачами. Боковые стенки этой зоны ограничивают угловое
перемещение рукоятки 12, Дпя предотвращения колебаний рукоятки под действием вибраций станка предусмотрена угловая ее фиксация с помощью подпружиненного фиксатора 27, кото55 рый заскакивает в одно из трех
гнезд 28, расположенных на неподвиж ном корпусе и фиксирующих рукоятку в одном из трех угловых положений30
3
нейтральное (рукоятка установлена вертикально); Подача вверх (руко- йтка повернута по часовой стрелке) и ПодаЧа вниз (рукоятка повернута часовой стрелки). Эта угловая фиксация рукоятки осуществляется только в исходном положении включения механической подачи.
Для включения ручной подачи рукоятку 12 устанавливают в вертикальное положение и перемещают по стрелке Р При этом штанга 15 посредством пальца 16 перемещается влево, увлекая за собой посредством вилки 17 ползун 7, Жестко связанный с ползуном фиксатор 27 отходит от неподвижных гнезд 28, полумуфты 5 сцепляются, полумуфты 6 вилкой 18 размыкаются. Разрывается кинематическая связь электродвигателя со шпинделем. Цилиндрический выступ 21, пройдя узкий участок of фигурной маски,
соответствующий разомкнутому положению обеих муфт и вертикальному положению рукоятки 12, попадает в зону фигурной маски, соответ109964
ствующую положению возможности осуществления ручной подачи. Ручная подача в нужном направлении осуществляется поворотом рукоятки 12 так5 же, как и при включении механической подачи. Угловые перемещения рукоятки 12 ограничиваются боковыми стенками зоны- И.
После манипуляции ручного управ10 ления производится автоматический возврат рукоятки 12 в исходное положение (управления механической подачей). Посредством пружины 24 рукоятка поворачивается в вертикальное по15 ложание. Одновременно цилиндрический выступ 2 i устанавливается против узкого участка а фигурной маски. Затем пружина 26 перемещает штангу 15 в крайнее правое положение а
20 рукоятку 12 - в исходное положение. Полумуфты 5 размыкаются, полумуфты 6 сцепляются. Электродвигатель вновь кинематически соединяется со шпинделем, а толкатель 19 устанавливается
25 против электрических контактов клю- чения механической подачи iшпинделя.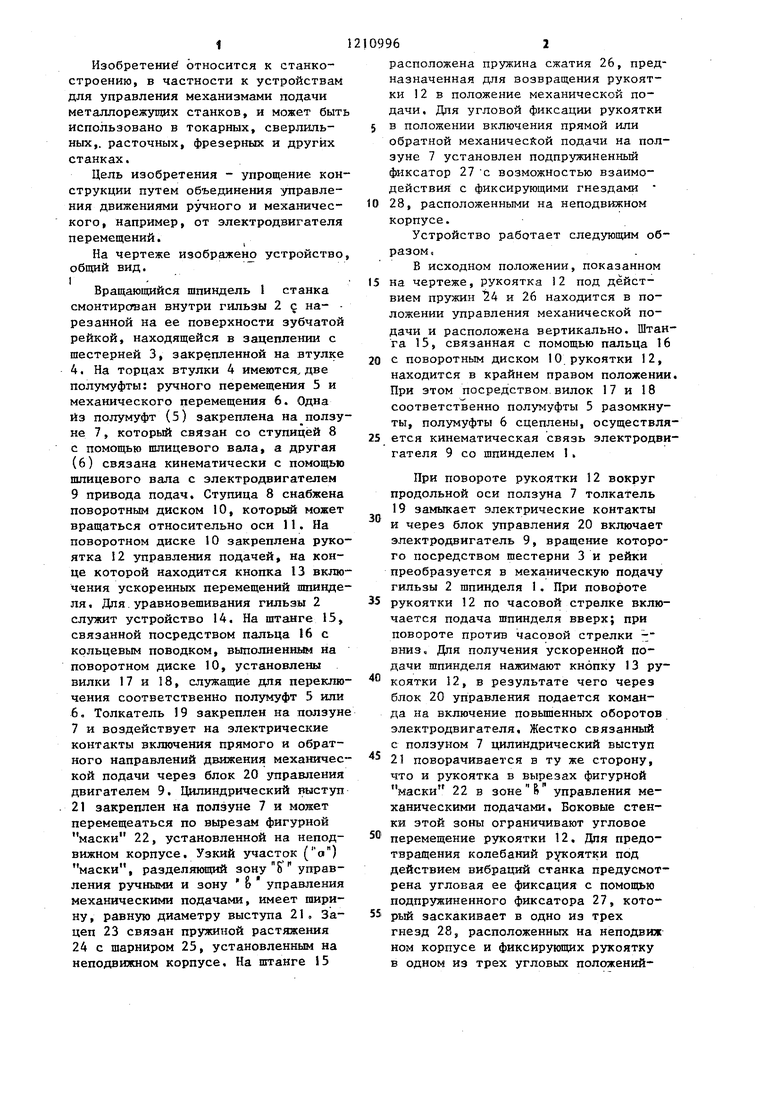
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод блока вакуумных клапанов | 1978 |
|
SU744143A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ТЕХНОЛОГИЧЕСКОГО КАНАЛА ИЗ УРАН-ГРАФИТОВЫХ АТОМНЫХ РЕАКТОРОВ | 1996 |
|
RU2094864C1 |
| РЕГУЛЯТОР НАТЯЖЕНИЯ НИТКИ ИГЛЫ НА ШВЕЙНЫХ МАШИНАХ | 2002 |
|
RU2202017C1 |
| МЕХАНИЗМ ПОДАЧИ ШПИНДЕЛЯ СВЕРЛИЛЬНОГО (РАСТОЧНОГО) СТАНКА | 1966 |
|
SU187480A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ШАРОВЫХ КРАНОВ И РУЧНОЙ ДУБЛЕР | 2001 |
|
RU2213890C2 |
| Устройство для комбинированного управления двигателем и муфтой сцепления транспортного средства | 1988 |
|
SU1523415A1 |
| Станок для обработки внутренней поверхности остова бочки | 1986 |
|
SU1437228A1 |
| Ленточно-шлифовальный станок | 1980 |
|
SU975348A2 |
| Система управления спусковыми механизмами пушек комплекса вооружения | 2020 |
|
RU2752111C1 |
| ЗАДНЯЯ БАБКА ТОКАРНОГО СТАНКА | 1971 |
|
SU307850A1 |
И
П
Редактор Л. Пчелинская
Заказ 583/16Тираж 1000 Подписное
ВНИИПИ Государственного комитета ССС
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная, 4
Составитель В. Алексеенко Техред Л.Микеш Корректор И. Муска
| Устройство для управления продольной подачей суппорта токарного станка | 1973 |
|
SU463515A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
