Изобретение относится к транспортному машиностроению, а именно к гидроприводам роторных экскаваторов.
Целью изобретения является повышение надежности его работы.
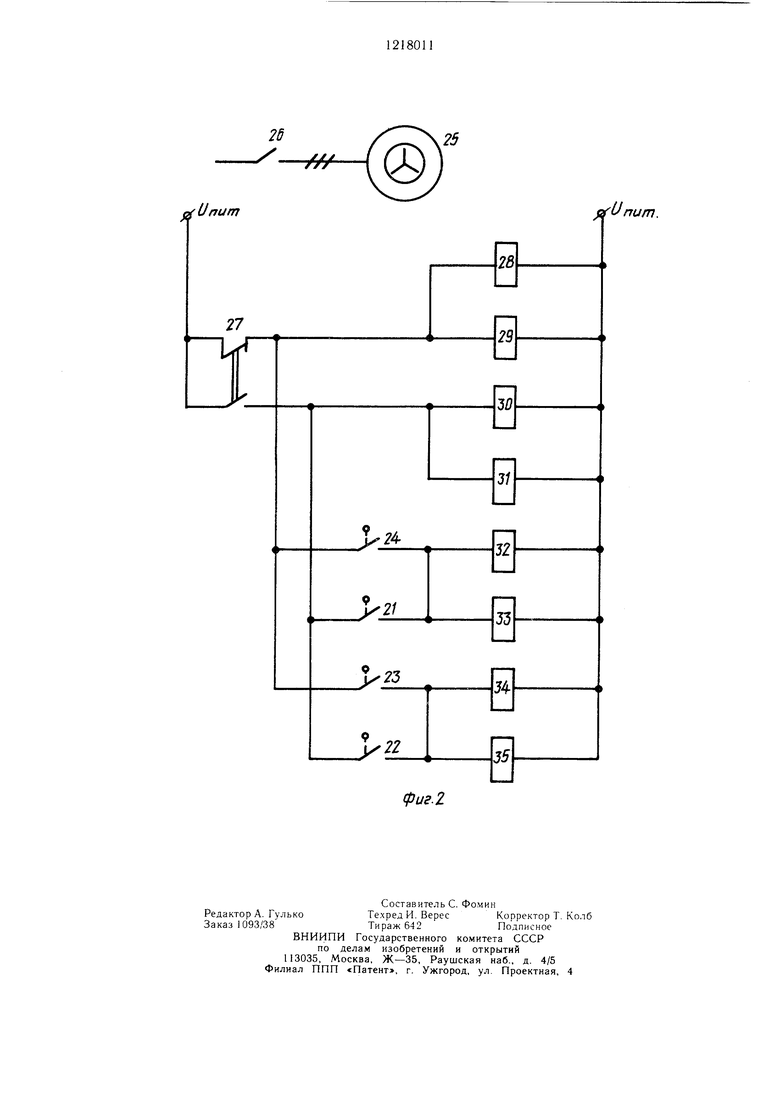
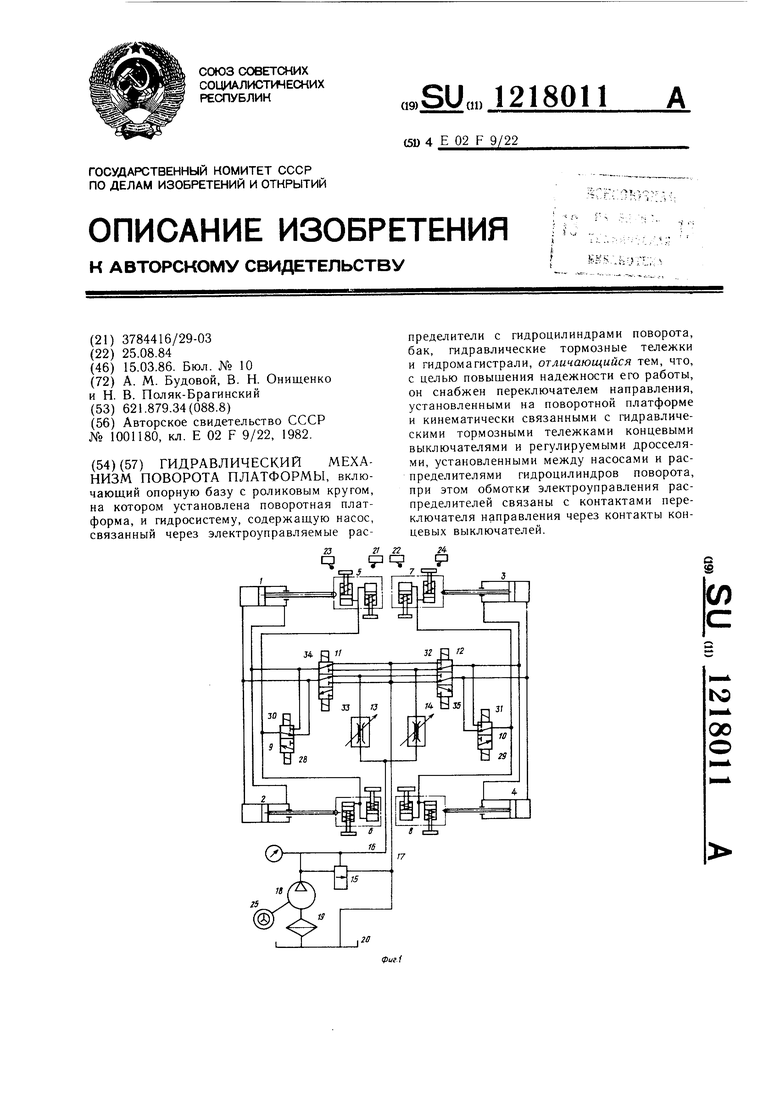
На фиг. 1 изображена гидравлическая схема управления механизма; на фиг. 2 - электрическая схема управления гидросистемой механизма.
Устройство имеет силовые гидроцилиндры 1-4, которые собраны в пары одинакового действия. На гидравлических тормозных тележках 5-8 установлены пары тормозных гидроцилиндров, рабочие полости которых соединены обшими напорными магистралями. Гидрораспределители 9 и 10 служат для задания направления вращения, а гидрораспределители 11 и 12 - для управления силовыми гидроцилиндрами 1-4. В гидросистему входят также управляемые дроссели 13 и 14, регулятор давления 15, поддерживающий постоянство давления в напорной магистрали 16, сливная магистраль 17, напорный насос 18, фильтр 19, бак 20, конечные выключатели 21 и 22, фиксирующие момент, когда шток силового гидроцилиндра полностью выдвинут, и конечные выключатели 23 и 24, фиксирующие момент, когда штоки силовых гидроцилиндров полностью втянуты.
Приводной электродвигатель 25 включается в сеть выключателем 26. Контактами переключателя направления 27 подключаются к цепи питания обмотки управления 28-31 гидрораспределителей 9 и 10 и контакты конечных выключателей 21-24, через которые к цепи питания подсоединены обмотки управления 32-35 гидрораспределителей 11 и 12.
Устройство работает следующим образом.
Переключателем направления 27 подается напряжение либо на пару обмоток управления 28 и 29, либо на пару 30 и 31 гидрораспределителей 9 и 10. При этом рабочие полости тормозных гидроцилиндров, установленных на тормозных тележках 5-8, соединены либо со штоковой, либо с глухой полостью силовых гидроцилиндров 1-4 и тормозные тележки заторможены либо при втягивании, либо при вытягивании штоков силовых гидроцилиндров. После включения выключателя 26 приводной двигатель начинает разгоняться и вследствие этого плавно нарастающее на выходе напорного насоса 18 давление сдвигает механизм. На схеме (фиг. 1) положение гидропереключателей показано таким, что штоки силовых гидроцилиндров i и 2 начинают выдвигаться. При этом рабочие полости соответствующих им тормозных гидроцилиндров соединены с напорной магистралью 16, тор.моза отжаты
5
И тормозные тележки 5 и 6 свободно перемещаются внутри кольцевой направляющей. В это время штоки силовых гидроцилиндров 3 и 4 втягиваются, рабочие полости соответствующих им тормозных гидроцилиндров соединены со сливной магистралью 17, тормозные тележки 7 и 8 заторможены в кольцевой направляющей и поворотная платформа разворачивается. В силу того, что сопротивление движению расторможен0 ной тормозной тележки меньше, чем усилие разворота платформы, щтоки гидроцилиндров 1 и 2 быстрее занимают крайнее положение. В момент, когда штоки силовых гидроцилиндров 3 и 4 находятся в крайнем положении, замыкается контакт конечного выключателя 24, который через размыкающий контакт переключателя 27включает обмотки управления 32 и 33. При этом силовые гидроцилиндры 1 и 2, втягивая -щтоки, начинают разворачивать платформу, а силовые
0 гидроцилиндры 3 и 4, выдвигая штоки, совершают свободный ход. Обратное переключение совершает конечный выключатель 23, когда щтоки силовых гидроцилиндров занимают новое крайнее положение.
При изменении направления вращения
5 через замыкающий контакт переключателя направления движения 27 включены обмотки управления 30 и 31, а силовые гидроцилиндры переключаются конечными выключателями 21 и 22.
Такой режим переключения гидрораспределителей устраняет задержки механизма в так называемых мертвых точках. При этом величина усилия, развиваемого поршнем силового гидроцилиндра, зависит не только от величины давления развиваемого напорr ным насосом, но и от величины гидравлического сопротивления питающей магистрали и скорости перемещения порщня, а значит и скорости поворота механизма.
Для регулирования скорости поворота в напорные магистрали введены регулируемые дроссели 13 и 14, причем один из них работает при рабочем ходе силового гидроцилиндра, а второй - при возвратном. При изменении направления вращения их роли меняются местами.
Сопротивление вращению стрелы роторного экскаватора при отработке рабочего хода меняется в зависимости от толщины срезаемой стружки. Механизм при уменьшении толщины стружки автоматически увеличивает скорость, что позволяет стабилизи0 ровать производительность роторного экскаватора при отработке сравнительно однородных геологических структур без применения дополнительных регулирующих устройств.
0
5
Unum
U пит.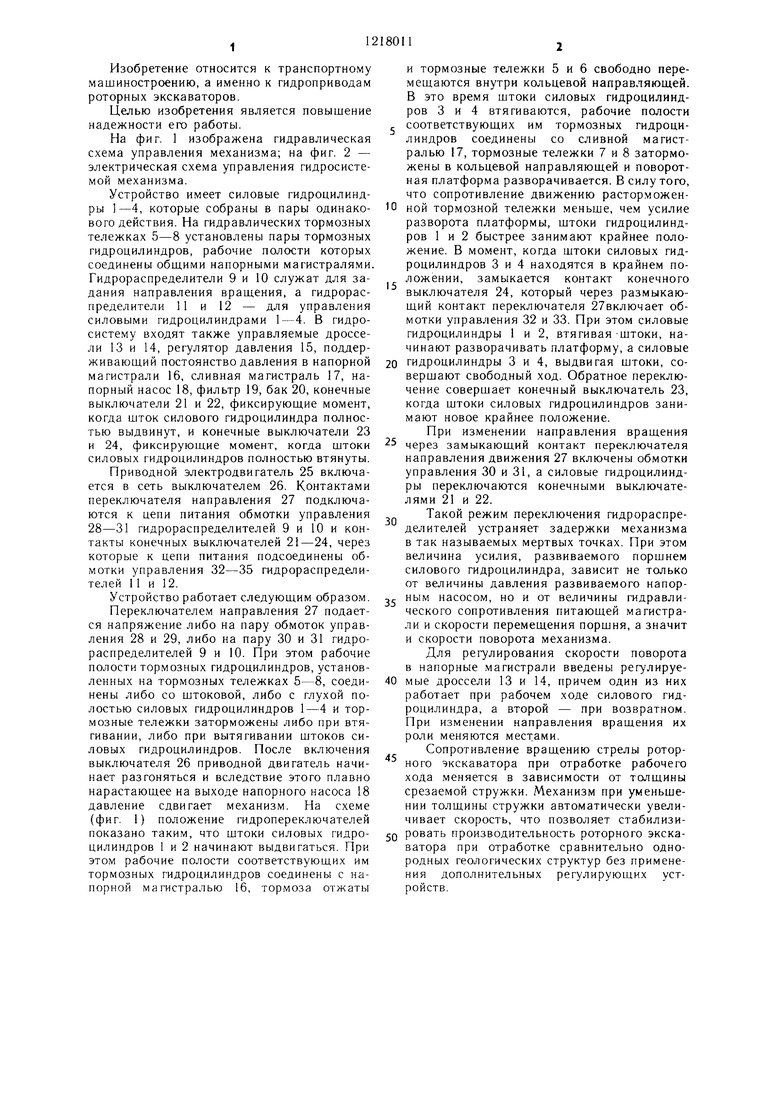
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический механизм поворота | 1981 |
|
SU1011800A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1980 |
|
SU899762A1 |
| ГИДРАВЛИЧЕСКИЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2010 |
|
RU2436696C1 |
| Пневмоэлектрогидравлический следящий позиционный привод подачи инструмента | 1974 |
|
SU488450A1 |
| МОЛОТ МАА ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 2002 |
|
RU2237808C2 |
| Устройство для стабилизации заданного положения платформы транспортного средства | 1990 |
|
SU1743916A1 |
| ПРУЖИННО-ГИДРАВЛИЧЕСКИЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2006 |
|
RU2337028C2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1967 |
|
SU202741A1 |
| Устройство для управления проходческим комбайном | 1977 |
|
SU720155A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1985 |
|
SU1271941A1 |
У
W
L
52
53
Jx23
54
фиг.г
| Устройство для контроля памяти | 1981 |
|
SU1001180A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
