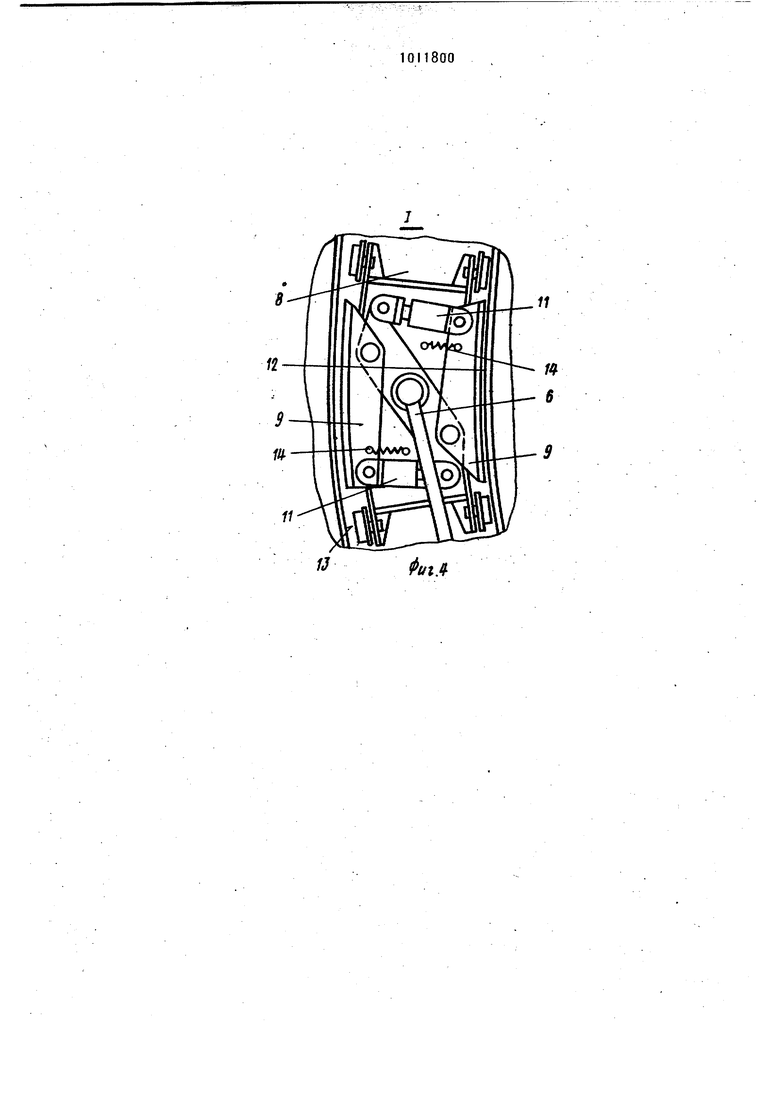
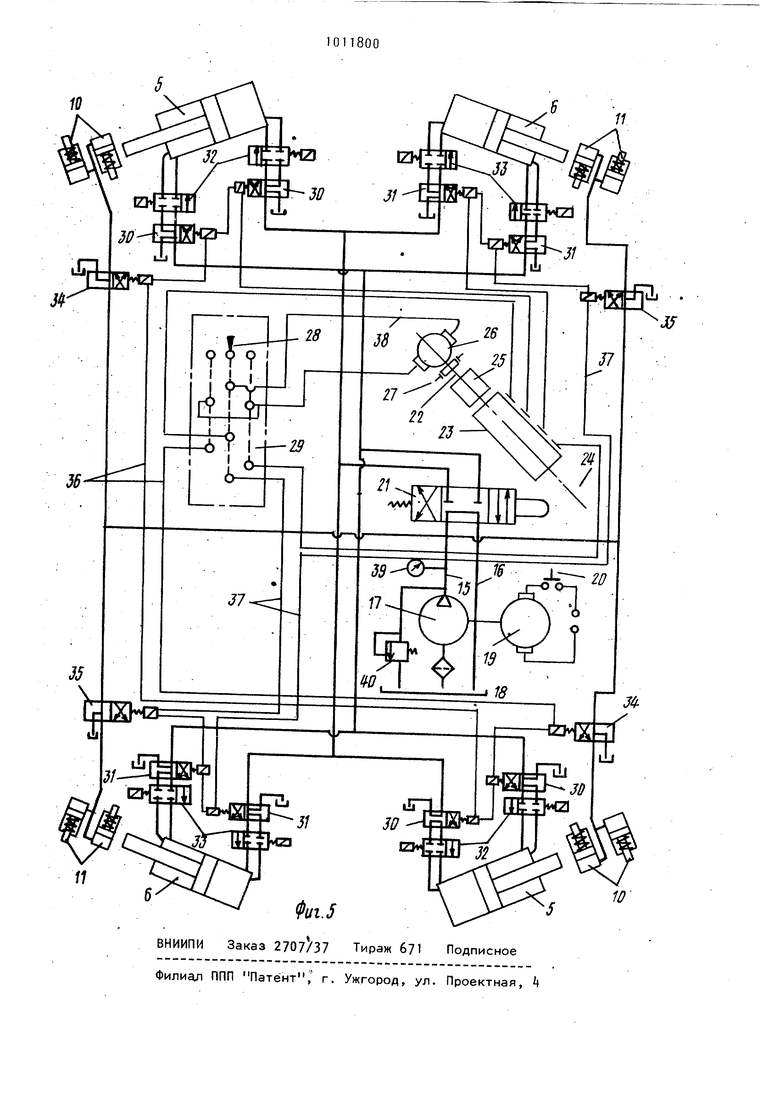
Изобретение относится к транспорт ному машиностроению и может быть использовано, например, в роторных экскаваторах и отвалообразователях. Известен гидравлический поворотный механизм для мощных экскаваторов содержащий опорную базу, поворотную платформу, опирающуюся на опорную базу через роликовый круг, и шарнирн закрепленные на поворотной платформе силовые гидравлические цилиндры двухстороннего действия, штоки которых шарнирно соединены с эксцентрически установленной на поворотной платфооме центральной цапфой l. Такое устройство значительно усложняет конструкцию поворотной платформы и схему управления поворотом, кроме этого, эксцентренное приложение действия силовых гидроциг 1ндров на поворотную платформу обуславливает возникновение весьма значительных радиальных нагрузок на роликовый круг, что приводит к быстрому износу его элементов. Наиболее близким к изобретению является гидравлический механизм по-. ворота, включающий опорную базу с роликовым кругом, на котором установлена поворотная платформа, и механизм поворота с гидроцилиндрами 1;2 Недостатками такого механизма поворота являются его сложность, малая надежность ввиду наличия открытой зубчатой пары, а эксцентреннре прило жение действия силовых гидроцилиндро обуславливает неравномерность вращаю щего момента платформы экскаватора. Цель изобретения - повышение надежности. Поставленная цель достигается тем что в гидравлическом механизме поворота, включающем опорную базу с роли ковым кругом, на котором установлена поворотная платформа, и механизм пов рота с гидроцилиндрами, опорная база снабжена установленной соосно с пово ротной платформой кольцевой направля щей, а .механизм поворота выполнен в виде попарно установленных в кОльцевой направляющей тормозных тележек между которыми установлены гидроцилиндры, штоки которых соединены с то мозными тележками, а корпуса - с поворотной платформой. Кроме того, тормозные тележки имеют фрикционные колодки, установленные с возможностью взаимодействия с кольцевой направляющей. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - вид сверху (поворотная платформа .поворачивается на угол сС) ; на фиг. k - тормозная те.лежка (узел I на фиг. 3), общий вид; на фиг. 5 гидравлическая схема управления механизмом. Гидравлический механизм поворота состоит из. поворотной платформу 1, опорной базы 2 с роликовым кругом 3 и механизмом поворота с гидроцилиндрами двухсторо.ннего действия 5 и 6, корпуса которых шарнирно закреплены на поворотной платформе 1, а штоки - на тормозных тележках 7, установленных попарно в кольцевой направляющей 8 и несущих фрикционные колодки 9. а также гидроцилиндры 10 и 11. Фрикционные колодки 9 прижаты к поверхностям 12 и 13 кольцевой направляющей 8 пружинами 1. Гидроцилиндры 5 и 6 в каждой паре тормрзных тележек 7 имеют противоположное направление, .Одноименные полости гидроцилиндров 5 и 6 в схеме управления механизмом поворота соединены между собой. Схема управления механизмом поворота является следящей электрогидравлической. Она включает в себя напорную и сливную магистрали 15- и 1б, гидронасос 17, засасывающий рабочую жидкость из гидробака 18. Гидронасос 17 ПРИВОДИТСЯ .в движение электродвигателем 19, который включается и выключается пусковой кнопкой 20. Рабочая жидкость подается к золотниковому распределителю- 21, который управляется следящим устройством 22. Следящее устройство 22 состоит из контактного барабана 23, вращающегося на одной оси с кулачком и приводимого в движение через кинематический редуктор 25 электродвигателем 2б с нормально замкнутым тормозом 27. Пуск электродвигателя 26 осуществляется поворотом вправо и влево из нейтрального положения рукояти 28 командоаппарата 29. От золотникового распределителя 21 рабочая жидкость поступает через двухпозиционные распределители 30 и 31 и гидрокраны 32 и 33 к гидроцилиндрам 5 и 6. Тормозные гидроцилиндры 10 и 11 соединены с напорной магистралью 15 через двухпозиционные распределители 3 и 35. Электромагниты гидрораспределите лей 30 и З соединены последователь но цепью управления Зб, которая замыкается при соответствующем положе нии рукояти 28 и контактного бараба Аналогично соединены цепью управ ления 37 электромагниты гидрораспределит лей 31 и 35. Электромагнит гидрокрахов 32 и 33 соединены после довательно в цепи 38 управления электродвигателем 26. В напорной магистрали 15 установлены манометр 39 и гидроклапан lO. Устройство работает следующим образом. J. В исходном положении (фиг. 2) гид раелические краны 32 и 33 перекрываю яоступление и выход рабочей жидкости в полостях цилиндров 5 и 6, обеспечивая тем самым их работу в тормозйом . Пружины 1А прижимают тор мозныё; колодки 9 к поверхностям 12 и 13 направляющей 8, фиксируя тем гкэворотную платформу 1 в нерабочем (транспортном) положении. Для осуществления поворота машинист нажимает кнопку 20, при этом Гидронасос 17 начинает нагнетать рабочую Ж14Дкость в напорную магистраль 15. При повышении давления рабочей жидкое: ти в напорной магистрали 15 до необходимой величины поворотом рукояти 28 командраппарата 29 из нейтрал ьного положения влево машинист включает контактное устройство 22, которое своим кулачком 2 воздействует на шток золотника гидрораспределителя- 21. В зависимости от положения штока золотника гидрораспределителя 21 рабочая жидкость поступа ет в бесштОковую или штоковую полости гидроцилиндров 5 и 6. Скорость . вращения контактного барабана 23 подобрана так, что Один его оборот соответствует полному циклу работы цилиндров 5 и 6 (из втянутого положения шток вытягивается полностью из корпуса гидроцилиндра, а затем вновь втягивается до конца). При подаче рабочей жидкости в бес штоковые полости гидроцилиндров 5 и 6 одновременно через гидрораспреде лители З жидкость поступает в полос ти гидроцилиндров 10; при этом тормозные колодки 9 отходят от поверхностей 12 и 13 направляющей 8, растормаживая тем самым тормозные тележки 7, соединенные с гидроцилиндрами 5. Силовые гидроцилиндры 6, штоки , которых в этот момент зафиксированы тормозными колодками 9 тормозных тележек 7 на направляющей8, создают i крутящий момент, воздействующий на поворотную платформу 1, одновременно штоки силовых гидроцилиндров 5 выдвигаются свободно и перемещают тележки 7 по направляющей 8, Гидрораспределители 30 и 31 обеспечивают подачу рабочей жидкости через разные канат) в зависимости от включения и отклю- . чения цилиндров 1.0 и 11, выравнивая тем самым скорости нагруженных и ненагруженных цилиндров 5 и 6. При подаче рабочей жидкости в штоковые полости гидроцилиНдров 5 и 6 (фиг. 3) срабатывают гидрораспределители 35 И жидкость подается в гйдроцилиндры 11. В этом случае рабочий крутящий момент создают гидроцилиндры 5 а штоки гидроцилиндров 6 свободно втягиваются . Под воздействием крутящего момента поворотная платформа 1 поворачивается на ti«i соответствующий ходу погминя гидроцилиндров 5« Вращение поворотной платформы 1 в противоположную сторону осуществляется аналогично перемещением рукояти 28 вправо. Чередованием циклов втягивания и вытягивания ШТОКОВ гидрОцилиндров 5 и 6 и одновременным растормаживанием соответствующих тележек 7 осуществляется поворот платформы 1 на любой необходимый угол. Для уменьшения горизонтальных нагрузок на роликовый круг 3 одноименные гидроцилиндры 5 и 6 размещены на диаметрально противоположных краях поворотной платформы 1. Их коли- . чество выбирается в зависимости от суммарного крутящего момент, необходимого для осуществления поворота платформы 1. В данном механизме поворота силовые гидроцилиндры располагаются по касательной к контуру направляющей, что обеспечивает наибольшую эффективность их работы, узлы механизма имеют свободный доступ при обслуживании, схема управления механизмом достаточно проста, а отсутствие эксцентриковых устройств и открытых зубчатых пар упрощает механизм и повышает его эксплуатационную надежность.
/2
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический механизм поворота платформы | 1984 |
|
SU1218011A1 |
| МОЛОТ МАА ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 2002 |
|
RU2237808C2 |
| Гидравлический механизм поворота | 1982 |
|
SU1084388A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ЭКСКАВАТОРА | 2020 |
|
RU2735771C1 |
| Одноковшовый экскаватор | 1989 |
|
SU1714048A1 |
| Гидравлический привод экскаватора | 1972 |
|
SU608892A1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| Гидравлический привод экскаватора | 1979 |
|
SU829824A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СОЧЛЕНЕННОЙ ДВУХТЕЛЕЖЕЧНОЙ ГУСЕНИЧНОЙ МАШИНОЙ | 1993 |
|
RU2089431C1 |
| Гидравлический одноковшовый экскаватор | 1979 |
|
SU823503A1 |


12
