(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1985 |
|
SU1379136A2 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1984 |
|
SU1339038A1 |
| Источник сейсмических колебаний | 1989 |
|
SU1714548A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1981 |
|
SU1009817A1 |
| Источник сейсмических колебаний | 1989 |
|
SU1642415A2 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1982 |
|
SU1066844A1 |
| Источник сейсмических колебаний | 1986 |
|
SU1509768A2 |
| Источник сейсмических колебаний | 1984 |
|
SU1236395A1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| Система управления выносными опорами платформы | 1982 |
|
SU1039863A1 |
Изобретение относится к устройствам для стабилизации заданного положения платформы транспортного средства относительно опорной поверхности и может быть использовано при стабилизации платформы во время работы источника сейсмических колебаний. Цель изобретения - расширение функциональных возможностей. Устройство включает платформу, маятниковый датчик углов наклона, прикрепленный к платформе через сферический шарнир, взаимодействующий со стопорным механизмом, включающим винт и нажимной диск. Электрогидраалическая система, включающая исполнительные механизмы в виде гидроцилиндров, обеспечивает требуемое расположение платформы относительно поверхности земли в зависимости от условий закрепления сферического шарнира. 1 ил.
Изобретение относится к устройствам для стабилизации положения платформы транспортного средства относительно опорной поверхности и может быть использовано при стабилизации платформы во время работы источника сейсмических колебаний.
Известно устройство для стабилизации горизонтального положения платформы транспортного средства, содержащее маятниковый датчик углов наклона с отвесом, исполнительные гидроцилиндры выносных опор, соединенных напорными и сливными гидромагистралями с гидрораспределителями, релейные усилители, соединенных с электрическими переключателями, закрепленными на корпусе маятникового датчика, на отвесе которого выполнены выступы, гидрораспределители включают в себя
электроуправляемые золотники,электрически связанных с релейными усилителями, реле режимов работы и электрическими переключателями маятникового датчика.
Недостаток известного изобретения заключается в узких функциональных возможностях, определяемых стабилизацией платформы только в горизонтальном положении, хотя на практике часто наблюдаются случаи необходимости длительной работы при каком-то определённом фиксированном положении платформы, отличительном от горизонтального положения.
Цель изобретения - расширение функциональных возможностей.
Указанная цель достигается тем, что введен сферический шарнир, палец которого жестко закреплен на верхнем торце корпуса маятникового датчика, а его наружная
М I-N
СО sQ
втулка установлена в корпусе стопорного механизма, жестко закрепленного на плат- Форме транспортного средства, при этом контактируемая с пальцем поверхность нажимного диска стопорного механизма также выполнена сферической.
Схемы существующих устройств для стабилизации горизонтального положения платформы транспортных средств стабилизируют платформу только относительно горизонтального положения, что не всегда оправдано при сейсмических исследованиях. Предлагаемое же устройство за счет введения сферического шарнира и стопорного механизма создает широкие возможности для стабилизации платформы при различных ее наклонах, при этом величина этих наклонов выбирается исходя из условий местности, и при этом может иметь од- ним из промежуточных значений - горизонтальное положение.
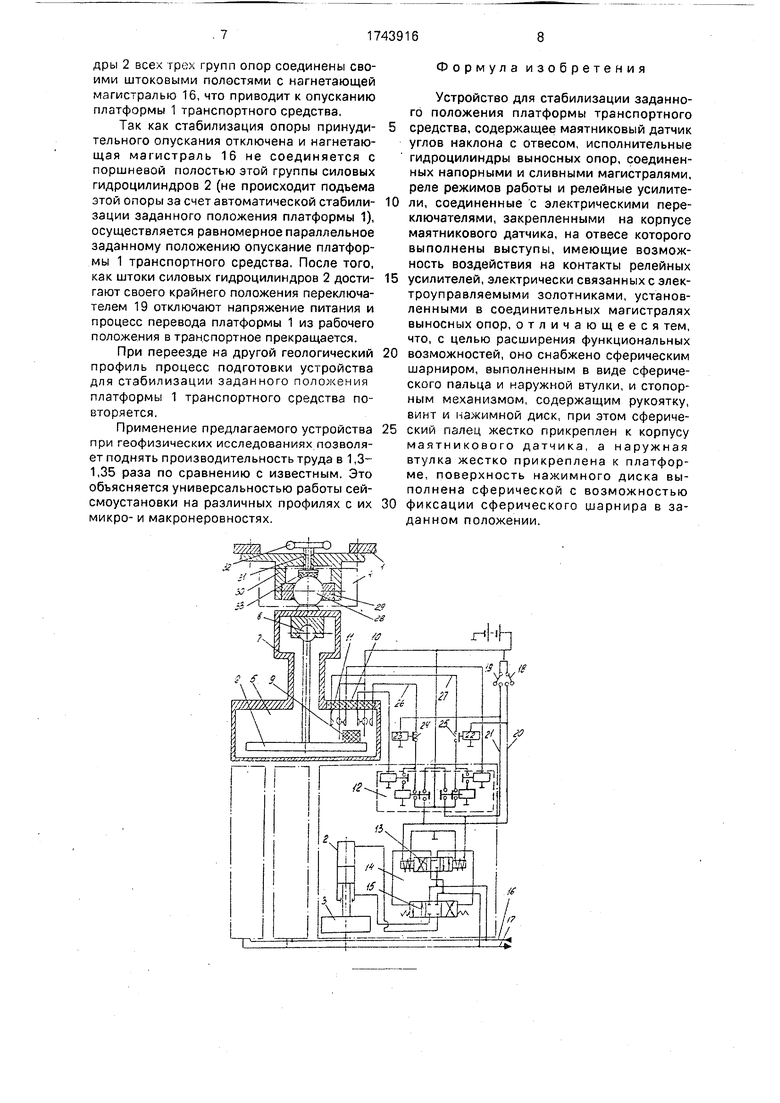
На чертеже изображена принципиальная схема устройства для стабилизации заданного положения платформы транспортного средства.
Устройство содержит платформу 1, на которой жестко закреплены корпуса трех групп гидроцилиндров 2, а их штоки соединены с выносными опорами 3, на которых платформа вывешивается в горизонтальном положении при сейсмических исследованиях установки. На платформе 1 также закреплен с помощью сферического шарнира 4 маятниковый датчик 5 сигналов продольного и поперечного крена. Отвес 6 маятникового датчика крепится к корпусу 7 с помощью карданного шарнира 8. На отвесе 6 выполнены выступы 9, а на корпусе 7 установлены три переключателя 10, имеющие по шесть контактных пластин 11, Каждый из переключателей 10 соединен с релейным усилителем 12.
Релейный усилитель 12 соединен с электроуправляемым золотником 13 гидрораспределителя 14, включающим в себя также золотник 15 управления группой гидроцилиндров 2. Рабочая жидкость к золотнику 15 управления подается по напорной гидромагистрали 16 и отводится по сливной гидромагистрали 17 (насос, маслобак, клапаны не показаны). Для перевода платформы 1 из транспортного положения в рабочее и наоборот устройство снабжено переключателем 18 включения режима перевода платформы 1 из транспортного положения в рабочее и переключателем 19 включения режима перевода платформы 1 из рабочего положения в транспортное. Эти переключатели 18 и 19 соединены с соответствующими обмотками.электроуправляемо- го золотника 13.
В каждую из цепей 20 и 21 принудительного управления через управляющие реле электроуправляемого гидрораспределителя подачей рабочей жидкости в рабочие полости силовых гидроцилиндров 2 включены реле 22 и 23, а их контакты 24 и 25 включены соответственно в цепь 26 управляющего реле поршневых полостей автоматического управления силовыми гидроцилиндрами 2. При этом обмотки дополнительного реле 22, контакты 25 которого включены в цепь 27 управляющего реле поршневых полостей, включены в цепь 20 принудительного воздействия на управляющие реле поршневых полостей. Принудительное управление осуществляется с помощью переключателей 18 и 19.
Сферический шарнир 4 состоит из пальца 28, выполненного в виде сферы и закрепленного жестко на верхнем торце корпуса 7 маятникового датчика 5. Наружная втулка 29 установлена в корпусе 30 стопорного механиэма, жестко закрепленного на платформе 1 транспортного средства. На винте 31 стопорного механизма установлены рукоятки 32 управления и нажимной диск 33, кон- тактируемая поверхность которого со
сферой пальца 28 также выполнена сферической.
Устройство работает в режиме стабилизации заданного положения платформы 1 транспортного средства во время работы
источника сейсмических колебаний, в режиме перевода платформы 1 из транспортного положения в рабочее и в режиме перевода платформы 1 из рабочего положения в транспортное. Перед проведением геофизических исследований оператор определяет необходимое положение платформы 1, исходя из рельефа геологического профиля. На характерном участке проворотом рукоятки 32 снимается блокировка сферического
шарнира 4 и корпус 7 маятникового датчика 5 вместе с отвесом 6, отклоняется от своего нейтрального положения на угол, соответствующий углу отклонения от горизонтальности характерного участка. Затем оператор
блокирует сферический шарнир 4, воздействуя на рычаг 32, который прижимает нажимной диск 33 к сферической поверхности пальца 28. После проведения вышеприведенных операций установка подготовлена
для проведения геофизических исследований на данном геологическом профиле.
В режиме перевода платформы 1 из транспортного положения в рабочее устройство работает следующим образом.
При замыкании переключателем 18 цепи 20 принудительного воздействия на электроуправляемый золотник 13 напряжение питания подается на его левую обмотку. Золотник 13 перемещается в крайнее левое положение и соединяет нагнетательную магистраль 16с правой камерой золотника 15, перемещая его также влево. После этого напорная магистраль 16 соединяется с поршневой полостью силового гидроцилиндра 2, а сливная 17 - со штоковой, что приводит к принудительному поднятию этой опоры и, как следствие, к отклонению платформы 1 от заданного положения.
Одновременно с принудительным воздействием на электроуправляемый золотник 13 подается напряжение питания и на обмотку реле 22, в результате чего разъединяются контакты 25, отключая цепь 27 и тем самым отключая воздействие маятника 6 через переключатель 10 и цепь 27 на правую обмотку электроуправляемого золотника 13 (отключается стабилизация только этой принудительно управляемой опоры).
Указанное отклонение платформы 1 от заданного положения приводит к отклонению отвеса 6 маятникового датчика 5, который своими выступами 9 замыкает соответствующие наружные контакты 11 переключателей 10, тем самым подавая напряжение питания на соответствующие электроуправляемые золотники 13, которые, в свою очередь, способствуют соедине- нию нагнетающей магистрали 16 с поршневыми полостями силовых гидроцилиндров 2 остальных двух групп опор.- В результате все силовые гидроцилиндры 2 всех трех групп опор соединены своими поршневыми полостями с нагнетающей магистралью 16, что приводит к подъему платформы 1 транспортного средства. Так как стабилизация опоры принудительного подъема отключена и нагнетающая магистраль 16 не соединяется со штоковой полостью этой группы силовых гидроцилиндров 2 (не происходит опускание этой опоры за счет автоматической стабилизации), осуществляется равномерный, параллельный .заданному положению подъем платформы 1 транспортного средства. После того, как платформа 1 достигает необходимой высоты подъема, переключателем 18 отключают напряжение питания и процесс перевода платформы 1 из транспортного положения в рабочее прекращается.
В режиме стабилизации заданного положения платформы 1 транспортного средства устройство работает следующим образом. Во время работы сейсмической установки на профиле происходит неравномерное проседание опор (излучателей сейсмических сигналов) из-за неравномерного уплотнения грунта, имеющего неоднородную структуру под различными опорами. В
результате происходит отклонение платформы 1 от заданного положения. При этом отклоняется и корпус 7 маятникового датчика 5 углов наклона, а отвес 6 датчика 5 под действием собственного веса сохраняет
0 вертикальное положение. При этом каждый из выступов 9 на отвесе 6 датчика 5 замыкает соответствующие контакты 11 на переключателях 10, после чего срабатывают соответствующие реле на релейном усили5 теле 12 и напряжение питания подается на соответствующую обмотку электроуправляемого золотника 13 гидрораспределителя 14, гидравлически воздействуя на золотник
15управления силовым гидроцилиндром 2. 0 соединяя его рабочие полости с напорной
16или сливной 17 магистралями. В результате этого происходит выдвижение или за- движение штока соответствующего силового гидроцилиндра 22, а платформа 1
5 стабилизируется в заданном положении.
В режиме перевода платформы 1 из рабочего положения в транспортное устройство работает следующим образом. При замыкании переключателем 19 цепи 21 по0 дается напряжение питания на обмотку реле 22, в результате чего разъединяются контакты 24 цепи 26, отключая тем самым воздействие маятника 6 на левую обмотку электроуправляемого золотника 13 (отклю5 чается стабилизация только этой принудительно управляемой опоры).
Одновременно с этим подается напряжение литания на правую обмотку электроуправляемого золотника 13. Золотник 13
0 перемещается в крайнее правое положение и соединяет нагнетающую магистраль 16с левой камерой золотника 15, перемещая его также вправо. После этого нагнетающая магистраль 16 соединяется со штоковой поло5 стью силового гидроцилиндра 2, а сливная магистраль 17- с поршневой, что приводит к принудительному опусканию этой опоры и, как следствие, к отклонению платформы 1 от заданного положения. Это отклонение
0 приводит к отклонению отвеса 6 датчика 5, который своими выступами 9 замыкает соответствующие внутренние контакты 11 переключателей 10, тем самым подавая напряжение питания на правые обмотки со5 ответствующих электроуправляемых золотников 13, которые, в свою очередь, способствуют соединению нагнетающей магистрали 16 со штоковыми полостями гидроцилиндров 2 остальных двух групп опор. В результате все силовые гидроцилиндры 2 всех грех групп опор соединены своими штоковыми полостями с нагнетающей магистралью 16, что приводит к опусканию платформы 1 транспортного средства.
Так как стабилизация опоры принудительного опускания отключена и нагнетающая магистраль 16 не соединяется с поршневой полостью этой группы силовых гидроцилиндров 2 (не происходит подъема этой опоры за счет автоматической стабилизации заданного положения платформы 1), осуществляется равномерное параллельное заданному положению опускание платформы 1 транспортного средства. После того, как штоки силовых гидроцилиндров 2 достигают своего крайнего положения переключателем 19 отключают напряжение питания и процесс перевода платформы 1 из рабочего положения в транспортное прекращается.
При переезде на другой геологический профиль процесс подготовки устройства для стабилизации заданного положения
платформы 1 транспортного средства повторяется.
Применение предлагаемого устройства при геофизических исследованиях позволяет поднять производительность труда в 1,3- 1,35 раза по сравнению с известным. Это объясняется универсальностью работы сей- смоустановки на различных профилях с их микро- и макронеровностях.
Формула изобретения
Устройство для стабилизации заданного положения платформы транспортного
средства, содержащее маятниковый датчик углов наклона с отвесом, исполнительные гидроцилиндры выносных опор, соединенных напорными и сливными магистралями, реле режимов работы и релейные усилители, соединенные с электрическими переключателями, закрепленными на корпусе маятникового датчика, на отвесе которого выполнены выступы, имеющие возможность воздействия на контакты релейных
усилителей, электрически связанных с элек- троуправляемыми золотниками, установленными в соединительных магистралях выносных опор, отличающееся тем, что, с целью расширения функциональных
возможностей, оно снабжено сферическим шарниром, выполненным в виде сферического пальца и наружной втулки, и стопорным механизмом, содержащим рукоятку, винт и нажимной диск, при этом сферический палец жестко прикреплен к корпусу маятникового датчика, а наружная втулка жестко прикреплена к платформе, поверхность нажимного диска выполнена сферической с возможностью
фиксации сферического шарнира в заданном положении.
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1985 |
|
SU1379136A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
