Изобретение относится к машиностроению, в частности к конструкции узлов управления оборудованием для обработки давлением.
Целью изобретения является повышние безопасности обслуживания кривошипных прессов при одноруком или педальном управлении путем контроля правильности функционирования управляющего органа (кнопок, педали) включающего муфту пресса.
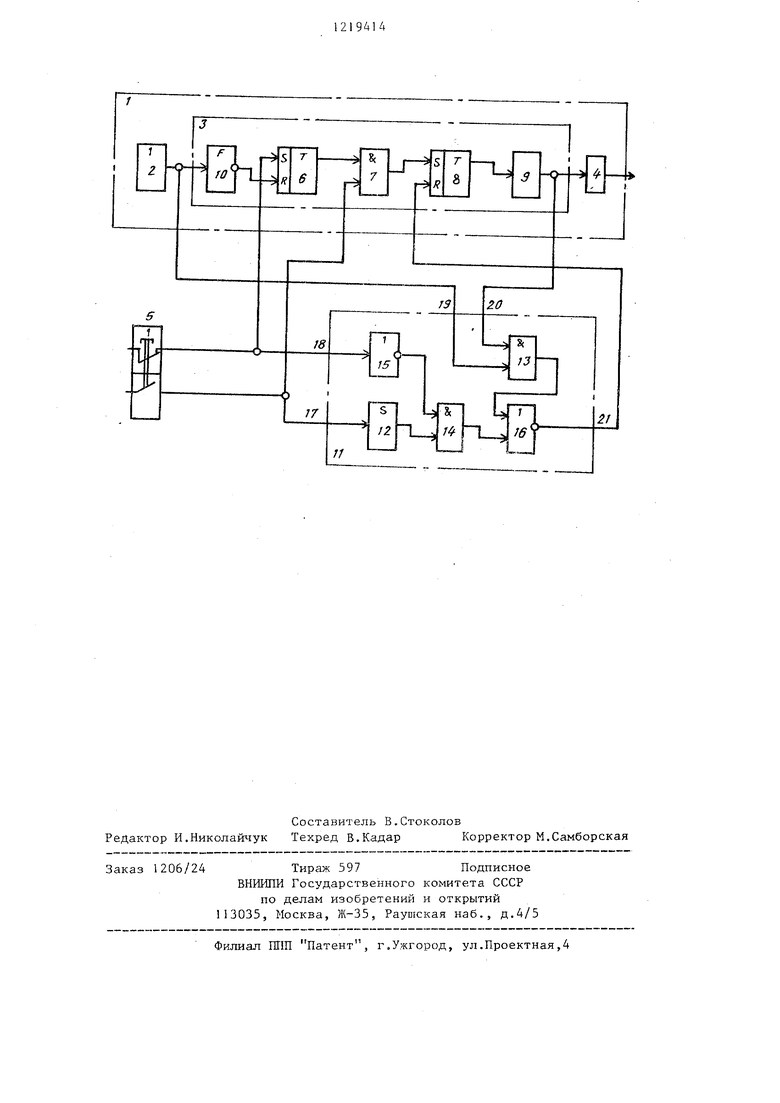
На чертеже показана конструкция системы управления.
Система управления содержит кана
1управления (второй идентичный .. канал управления не показан), выполненный в виде бесконтактного путевого выключателя 2 одиночного хода, блока 3 управления и электромагнита 4 пневмоуправления муфтой, являющегося исполнительным органом для данного канала. Система также содержит управляющий орган 5, подающий команды на включение муфты (например, кнопку или педаль) с размыкающим и замыкающим контактами. Блок 3 управления состоит из блоки- ровочного триггера 6; первого элемента И 7, управляющего триггера 8, усилителя 9, выход которого соедине с электромагнитом 4 пневмоуправле- мия муфтой, и согласующего элемента 10, вход которого соединен с выходо бесконтактного п.утевого выключателя
2одиночного хода.
Управляющий орган 5 своим размыкающим контактом подключен к S- входу блокировочного триггера 6, а замыкающим - к второму входу первого элемента И 7 в блоке 3 управления.
Каждьш канал управления снабжен узлом 1i контроля функционирозания управляющего органа, выполненным в виде одновибратора 12, второго 13 и третьего 14 элементов И, элемента НЕ 15 и элемента Ш1И-НЕ 16. При этом выход одновибратора 12 соединен с вторым входом третьего элемента И 14, выход которого под-, ключен к второму входу элемента И.ПИ-НЕ 16, первый вход которого соединен с выходом второго элемента И 13, а выход элемента НЕ 15 подключен к первому входу третьего элемента И 14.
Вход сдновибратора I2 является первым входом 17 узла 11 и соединен
с замыкающим контактом управляющего органа 5. Вход элемента НЕ 15 служит вторым входом 18 узла 11 и соединен с размыкающим контактом
управляющего органа 5. Второй вход второго элемента И 13, служащий третьим входом 19 узла 1 1 ,соединен с выходом выключателя 2 одиночного хода. Нервый вход второго элемента
И 13 является четвертым входом
20 узла 11 и подключен к выходу блока 3 управления, а выход элемента ИЛИ-НЕ 16, служащий выходом 21 узла 1, соединен с R-входом управляющего триггера 8.
Система управления прессом работает следующим образом.
При подаче напряжения в схему происходит зарядка емкости одновибратора 12 в узле 11. Управляющий орган 5 (кнопка, педаль) не нажат, поэтому постз пающие при этом на входы элемента НЕ 15 и одновибрато
ра 12 соответственно сигнал
II 1 М
выхода размыкающих контактов органа 5 и сигнал о с выхода замыкающих контактов последнего обусловливают наличие О на выходе указанных элементов, а следовательно, и на входах и выходе элемента И 14. Так как в этот момент сигнал О имеется также на первом входе элемента И 13 (поскольку каналы управления не включены) и, следова- тельно, на его выходе, то на оба входа элемента ИЛИ-НЕ 16 подается О, что определяет появление сигнала 1 на его выходе, откуда I подается на R-вход управляющего триггера 8, обеспечивая блокирование его в исходном состоянии.
При подаче команды на включение муфты с помощью управляющего органа 5 (кнопки или педали) происходит снятие сигнала 1 с входа элемента НЕ 15 (при размыкании размыкающего контакта органа 5) и подача 1 на второй вход первого элемента И 7 и на вход одновибратора 12 (замыка- ющим контактом органа 5). При этом на выходах элемента НЕ 15 и одно- вибратора 12 появляются сигналы I (на выходе одновибратора кратковременно) , которые подаются на оба входа третьего элемента И 14. С выхода последнего 1 поступает на вход элемента ИЛИ-НЕ 16. Это вызывает кратковременное снятие блоки312
рующего сигнала 1 с выхода 21 узла 11 контроля и с R-входа управляющего триггера 8, что приводит к переключению триггера 8 и включению канала 1 управления. Одновременно с выхода канала 1 на вход -20 узла 1-1 конт 1,
роля подается сигнал
что вызьгоает появление -на выходе элемента И и на первом входе элемента ИЛИ- НЕ 16, т.е. осуществляется самоблокировка, обеспечивающая включенное состояние канала 1 после окончания подачи сигнала одновибратора 12. Таким образом, включение канала 1 управления происходит после срабатывания узла 11 контроля и разблокирования каналов отправления.
Перед окончанием хода отключается путевой выключатель 2 одиночного хода, происходит снятие сигнала 1 с входа 19 узла 11 контроля, что влечет за собой снятие 1 с первого входа элемента ИЛИ-НЕ 16 и появление на его выходе блокирующего сигнала 1 (поскольку на втором . входе элемента ИЛИ 16 сигнала нет), Подача сигнала на R-вход управляющего триггера 8 приводит к переключению его в исходное состояние и отключению J aнaлa 1 управления и муфты пресса. Одновременно при отключении выключателя 2 с инверсных выходов согласующих элементов 10 на R-входы блокировочных триггеров 6 подаются сигналы 1 для переключения блокировочных триггеров в исходное состояние.
При аварийном замыкании контактов управляющего органа 5 исключается возможность самопроизвольного включения муфты, поскольку на вход 18 узла 11 контроля постоянно подан сигнал 1 (с размыкающего контакта органа 5), что обусловливает постоянное наличие О на входе элемента И 14 и отсутствие сигнала 1 на
1
9414
его ныходе. Каналы управления при этом остаются заблокированными. При этом также утрачив.ается возможность включения муфты с помощью
5 управляющего органа 5, что служит сигналом возникновения неисправност в цепях управляющего органа 5. Так, при нажатии органа 5 (кнопки, педали) с целью включения муфты и наличии замыкания между замыкающими и размыкающими контактами в момент
10
замыкания замыкающего контакта происходит подача 1 не только на
вход 17, но также и на вход 18 узла 11 контроля, что вызывает блокирование каналов управления.
При замыкании замыкающего контакта органа 5 подачи команды включения на входе одновибратора 12 постоянно имеется сигнал 1, а на выходе - О (после выдачи кратковременного импульса в момент замыкания) . При нажатии органа 5 подачи команды одновибратор 12 не меняет своего состояния, подавая О и на первый вход элемента И 14, что обусловливает наличие О и на выходе элемента И 14 и, как следствие, блокирование каналов управления.
При замыкании размыкающего контакта органа 5 на вход 18 узла 11 контроля постоянно подан блокирующий сигнал 1 и каналы управления остаются заблокированными также и при нажатии управляющего органа 5.
Таким образом, при аварийном замыкании цепей управляющего органа включения муфты пресса исключается возможность непредусмотренного включения хода пресса и травмирования персонала, что существенно повьщ1ает безопасность обслуживания пресса. Этим обуславливается эффективность использования системы управления кривощипным прессом.
-О
Кс
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления кривошипным прессом | 1984 |
|
SU1158814A1 |
| Система управления кривошипным прессом | 1981 |
|
SU967860A1 |
| Система управления прессом | 1975 |
|
SU566744A1 |
| Устройство управления кривошипным прессом | 1990 |
|
SU1712943A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ХОДАМИ ПРЕССА | 1972 |
|
SU341154A1 |
| Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1986 |
|
SU1335932A1 |
| Устройство управления кузнечно-прессовым автоматом | 1980 |
|
SU1043032A1 |
| Устройство управления кривошипным прессом | 1989 |
|
SU1712186A1 |
| Система управления силовым приводом | 1981 |
|
SU1086243A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
Составитель В.Стоколов Редактор И.Николайчук Техред В.Кадар Корректор М.Самборская
1206/24
Тираж 597Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раупгская наб., д.4/5
Филиал ПГГО Патент, г.Ужгород, ул.Проектная,4
| Электрооборудование кузнечно- прессовых машин: Справочник.- М.: Машиностроение, 1981, с.257-260. |
