Изобретение относится к измерительной технике и точному приборостроению и может быть использовано для осуществления установочных перемещений элементов приборов.
Цель изобретения - повышение точности перемещения выходного звена путем исключения пар трения и снижения зоны нечувствительности.
На чертеже изображен роликовый механизм перемещения, общий вид,
Роликовьй механизм перемещения содержит неподвижное 1 и подвижное 2 звенья, а также ведущий ролик 3, охваченный гибкой связью 4, закрепленной на неподвижном звене 1 и гибкой связью 5, закрепленной на подвижном звене 2, На концах гибких связей 4 и 5 выполнены выступы 6 и пазы 7. Для исключения проскальзьшания ведущего ролика 3 относительно гибких связей 4 и 5 последние должны быть прикреплены к нему в одном или нескольких местах, например, винтами 8.
Для уменьшения зоны нечувствительности механизма гибкие связи 4 и 5 перед креплением их к звеньям 1 и 2 должны быть растянуты до величины, допускаемой их прочностью.
Механизм работает следующим образом.
При вращении ведущего ролика 3 последний катится по гибким связям 4 и 5. При этом за счет разности диаметров, охватываемых гибкими связями при повороте ролика на угол возникает смещение гибкой связи 5 относительно гибкой связи 4 на величину
8 I: ,
Редактор А.Огар
Составитель С.Шумилишская
Техред В.Кадар Корректор В.Бутяга
Заказ 1617/56 Тираж 485Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г.Ужгород, ул.Проектная, 4
221682
где
to
15
20
25
ei R О - смещение гибкой связи 5 относительно гибкой связи 4;- угол поворота ведущего ролика
разность радиусов вращения, обусловленная конечной толщиной гибких связей 4 и 5. Отсутствие трения скольжения между гибкими связами, установленными с натягом, вследствие того, что нормальная сила в зоне их смещения друг относительно друга равна нулю, а контактные напряжения в остальной зоне малы, позволяет значительно уменьшить зону нечувствительности механизма, особенно при использовании гибких связей, выполненных из высокомодульных материалов, а также допускает работу механизма в агрессивных средах и вакууме при отсутствии смазки. Кроме того, механизм обеспечивает высокие точности устройств, в которых он может быть применен, при невысокой точности изготовления деталей самого механизма.
Формула изобретения
Роликовьй механизм перемещения, содержащий подвижное и неподвижное звенья и ролик с гибкой связью, оба конца которой закреплены на неподвижном звене, о.тличающийся тем, что, с целью повьш1ения точности перемещения, в него введена вторая гибкая связь, размещенная на первой, обе гибкие связи выполнены с пазом на одном конце и выступом на другом и закреплены на ролике, при этом оба конца второй гибкой связи жестко закреплены на подвижном звене.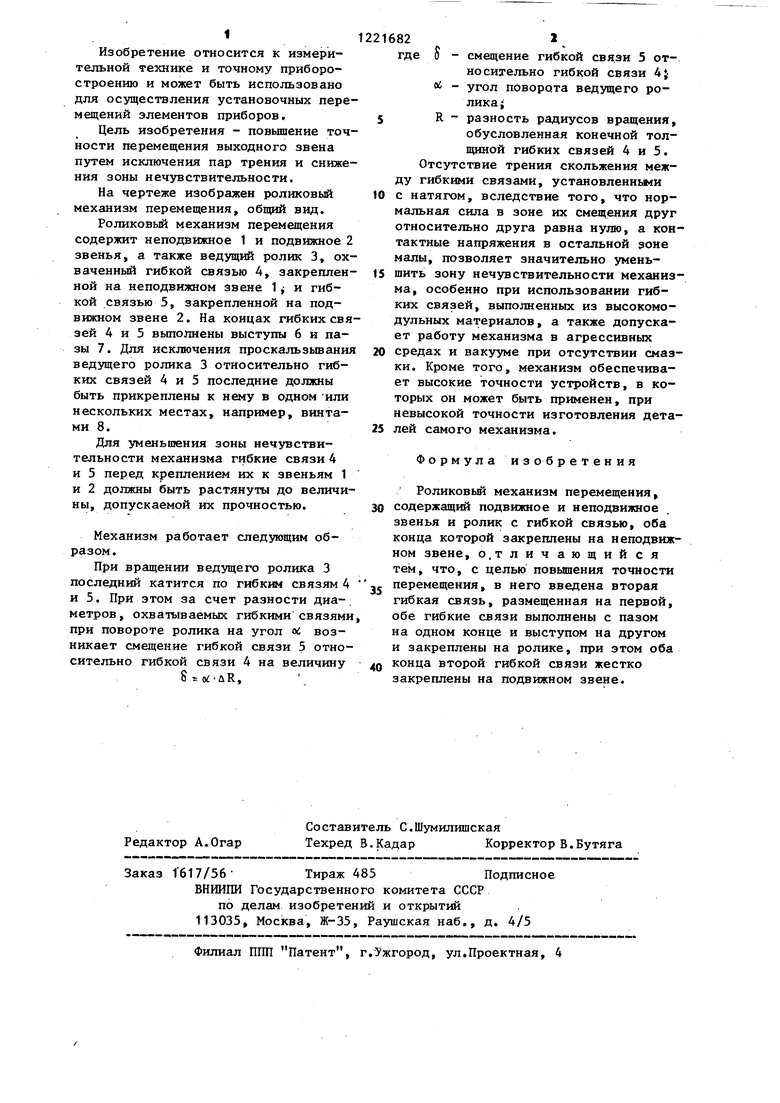
| название | год | авторы | номер документа |
|---|---|---|---|
| Роликовый механизм перемещения | 1986 |
|
SU1430990A2 |
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1374287A1 |
| Натяжное устройство | 1977 |
|
SU662804A1 |
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1439686A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2469426C1 |
| ПРИВОД ПЕРЕДНЕГО КОЛЕСА МОТОЦИКЛА | 2014 |
|
RU2559857C1 |
| ГРАФОПОСТРОИТЕЛЬ | 1989 |
|
RU1743303C |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Механизм перемещения с гибкими звеньями | 1984 |
|
SU1228149A1 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2004 |
|
RU2318572C2 |
Изобретение относится к измерительной технике и точному приборостроению и может быть использовано для осуществления установочных neper мещений элементов приборов. Ведущий ролик 3 катится по гибким связям 4 и 5, выполненньм с пазами на одном конце и выступами 6 на другом. Гибкая связь 4 закреплена на неподвижном звене 1, а гибкая связь 5 - на подвижном звене 2. Отсутствие трения скольжения мезвду гибкими связями 4 и 5, установленными с натягом, позволяет значительно уменьшить зону нечувствительности механизма и получить высокую Точность перемещения выходного звена. 1 ил. (П
| Рихтер О | |||
| и др | |||
| Детали точных приборов | |||
| М., ГНТИМЛ, 1963, с | |||
| Способ передачи радиотелеграфных сигналов | 1922 |
|
SU394A1 |
| Соловьев А.И | |||
| Расчет механизмов измерительных, вычислительных и автоматических устройств | |||
| М.-Л.: Энергия, 1966, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
