(Л
4
СО
о
со
со
N
Изобретение относится к области приборостроения, а именно к устройствам, обеспечивающим малые линейные перемещения.
Це, 1ыо изобретения является расширение диапазона перемещений путем введения до- 11олн11те.1ьной гибкой связи.
На чертеже изображен общий вид ро- .щкового механизма.
Роликовый механизм перемещения содержит ролик 1, охваченный гибкими связями 2-4, выполненными в виде лент. Концы гибких связей 2 и 4 закреплены на неподвижном 5 и подвижном 6 звеньях. Гибкие связи 2 и 4 закреплены на ролике 1. Концы |-ибкой связи 3 не закреплены.
Роликовый механизм перемещения работает следующим образом.
При вращении ролика 1, последний ка- тптся по гибкой связи 2, в результате звенья 5 и 6 перемещаются одно относительно другого. Величина перемещения определяется по формуле
(
где 6 - величина относительного перемещения звеньев;
а - угол поворота ролика; 1-2,1з,Ц-толщины соответствующих гибких
связей.
Из формулы видно, что величина относительного перемещения звеньев зависит от угла поворота ролика и толщин гибких связей. Например, если принять , то перемещение б 2at в 2 раза превыщает 10 перемещение известного механизма. Таким образом, предлагаемое устройство позволяет путем добавления в комплект известного механизма комплекта сменных лент без изменения конструкции собственно механизма значительно увеличить диапазон пе15
ремещении механизма.
Формула изобретения
Роликовый механизм перемещения по 20 авт. св. № 1221682, отличающийся тем, что, с целью расширения диапазона перемещений, он снабжен дополнительной гибкой связью, размец 1,енной между первой и второй гибкими связя.ми.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роликовый механизм перемещения | 1984 |
|
SU1221682A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ С ГИБКИМИ ЗВЕНЬЯМИ (ВАРИАНТЫ) | 2000 |
|
RU2160935C1 |
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1374287A1 |
| Механизм перемещения с гибкими звеньями | 1984 |
|
SU1228149A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2469426C1 |
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1439686A1 |
| Трехкоординатный датчик перемещений | 1979 |
|
SU848984A1 |
| Ленточно-роликовый механизм прямоли-НЕйНОгО пЕРЕМЕщЕНия | 1978 |
|
SU819456A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Устройство для исследования механизмов типа "ролямайт | 1976 |
|
SU609074A1 |
Изобретение относится к области приборостроения. Роликовый механизм перемещения содержит ролик 1, охваченный гибкими связями 2-4 в виде лент. Концы гибких связей 2 и 4 закреплены на неподвижном и подвижном звеньях 5 и 6 соответственно. Роликовый механизм иеремен1ения имеет рас1ниренный диапазон перемещенпй. 1 ил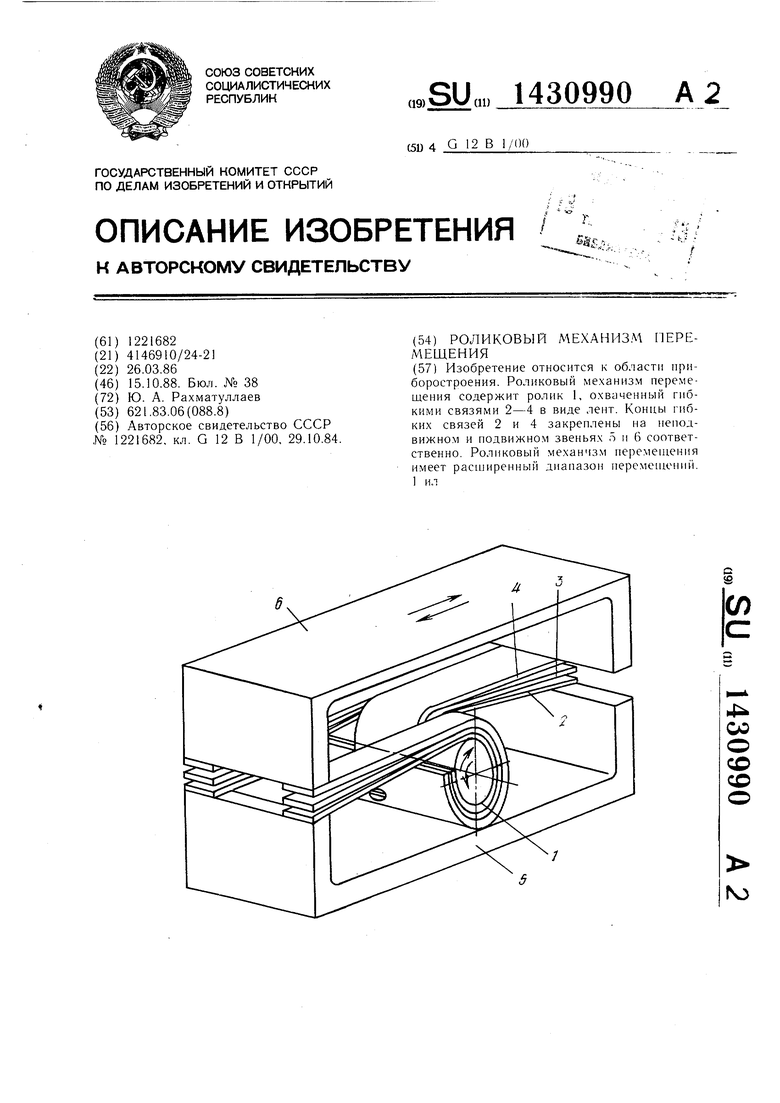
| Роликовый механизм перемещения | 1984 |
|
SU1221682A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
