11228149
Изобретение относится к приборостроению и может быть использовано в устройствах, обеспечивающих получение малых линейных перемещений раэ- личных объектов.5
Цель изобретения - повышение точности перемещений.
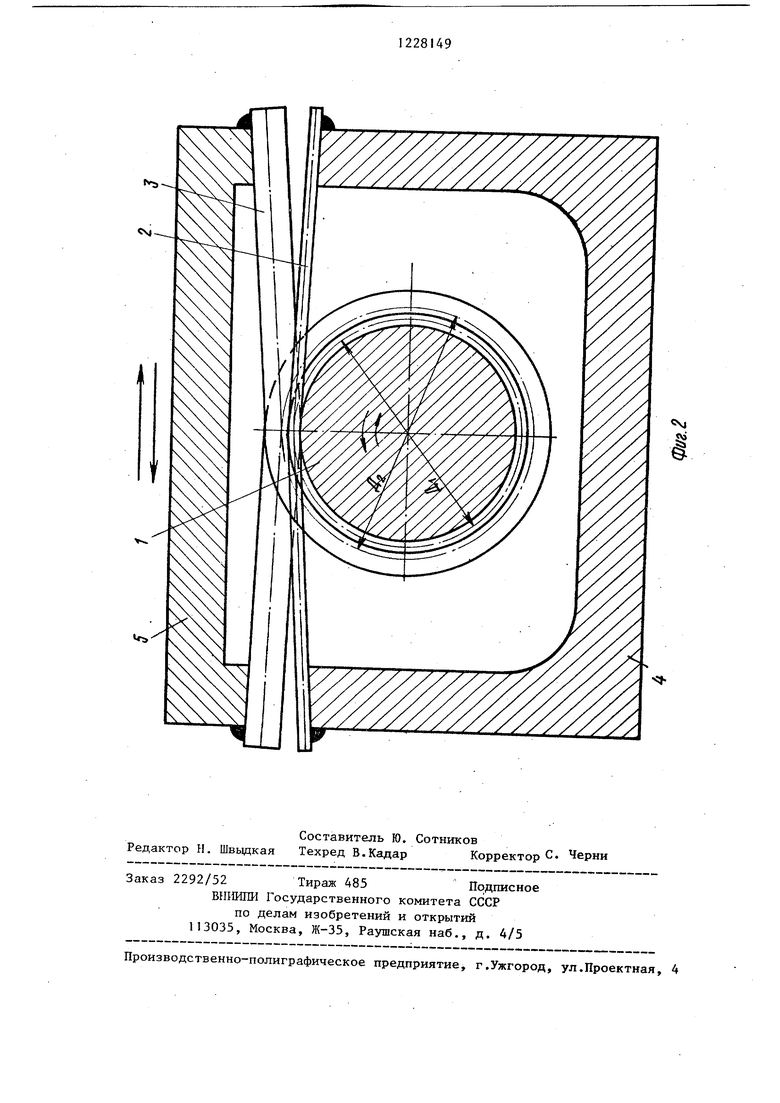
Па фиг. 1 изображен механизм перемещений с гибкими звеньями в аксоноотза от но
метрии; на фиг. 2 - то же, продольный tО толщин звеньев, что позволяет полуразрез.
Механизм перемещения с гибкими звеньями содержит установленный в корпусе (не показан) валик 1, охваченный гибкими звеньями (например, металлическими лентами или прутками) 2 и 3 разной толщины, концы которых жестко закреплены на ползунах 4 и 5 соответственно. Звенья 2 и 3 дпя исключения проскальзывания относительно валика 1 могут быть механически жестко закреплены на последнем.
Наружная цилиндрическая поверхность валика 1 вьтолнена постоянного диаметра, а оси симметрии сечений участков гибких звеньев 2 и 3, охватывающих валик 1, расположены на раз нь1Х диаметрах соответственно Д и Д . Количество пар гибких звеньев, используемых дпя соединения ползунов, определяется исходя из требований к нагрузочной способности механизма.
Работа механизма происходит следующим образом.
При вращении валика 1 он катится по гибким звеньям 2 и 3, в результате чего ползуны 4 и 5 двигаются в одном направлении и совершают перемещение один относительно другого, величина которого определяется по формуле
сх )
величина относительного перемещения ползунов; угол поворота валика; диаметры окружностей, на которых расположены оси сим метрии сечений, расположен- ных на валике участков гибких звеньев 2 и 3 соответственно.
Как видно из формулы, величина относительного перемещения ползунов зависит от угла поворота валика и от разности толщин гибких звеньев, но не зависит от самих абсолютных
чать очень малые относительные перемещения ползунов. Так, при толщинах гибких звеньев равных 1,00 и 0,99 мм и угле поворота валика, равном 1°, величина относительного перемещения ползунов составляет 0,044 мкм. Оснащение механизма дополнительным ползуном и дополнительным гибким звеном, соединенными между собой и с валиком с возможностью обеспечения перемещения обоих ползунов в одном направлении при повороте валика, позволяет повысить точность перемещений и обеспечить получение малых значений величин перемещения .
Формула изобретения
Механизм перемещения с гибкими звеньями, содержащий корпус, в котором установлен с возможностью поворота валик, охваченный жестко соединенным с ним гибким звеном, концы которого жестко закреплены на ползуне, о тлич ающийся тем, что, с целью повьш1ения точности перемещений, он снабжен дополнительным гибким звеном и дополнительным ползуном, основное и дополнительное гибкие звенья вьтолнены разной толщины, причем дополнительное гибкое звено жестко закреплено на охватьгоа- емом им валике, а его концы жестко закреплены на дополнительном ползуне с возможностью обеспечения перемещения обоих ползунов в одном направлении при повороте валика.
rrsCM« ъ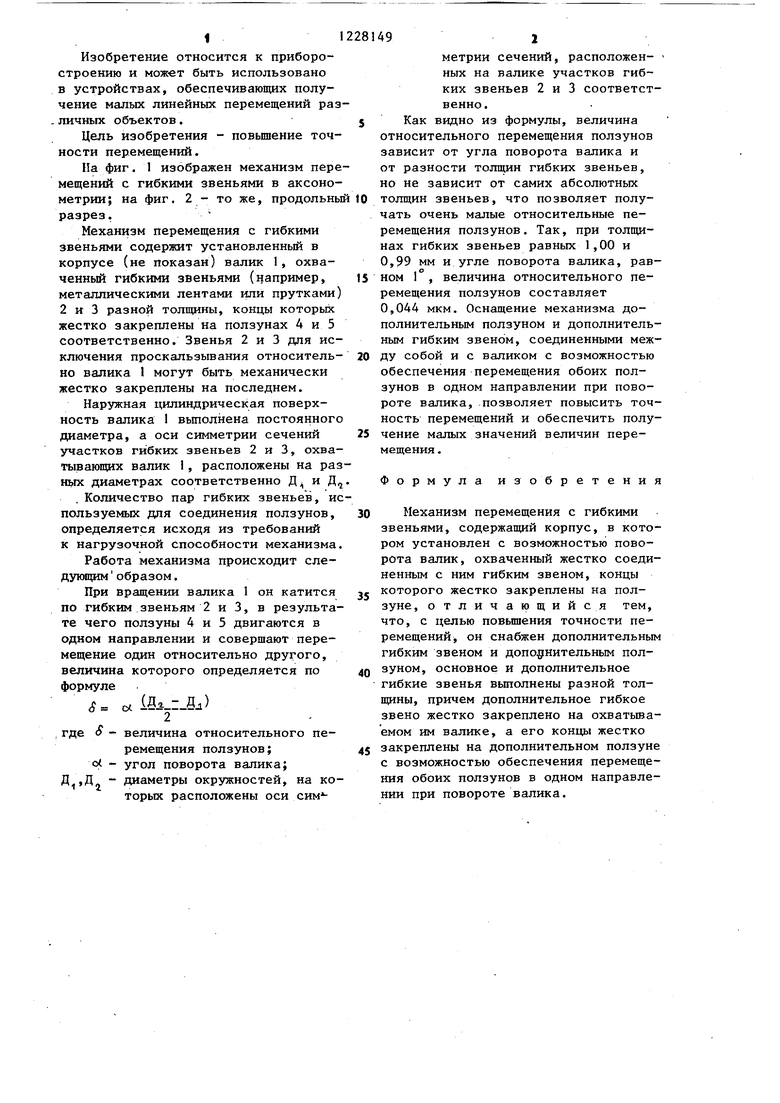
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1374287A1 |
| Роликовый механизм перемещения | 1984 |
|
SU1221682A1 |
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1439686A1 |
| Роликовый механизм перемещения | 1986 |
|
SU1430990A2 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2469426C1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ С ГИБКИМИ ЗВЕНЬЯМИ (ВАРИАНТЫ) | 2000 |
|
RU2160935C1 |
| Узел выходных щелей квантометра | 1983 |
|
SU1138660A1 |
| Ленточно-шлифовальное устройство | 1978 |
|
SU749644A1 |
| Регулируемый шаблон для изготовления футеровки сталеразливочных ковшей | 1983 |
|
SU1088877A1 |
| Механизм угловых перемещений с гибкими звеньями | 1987 |
|
SU1506486A1 |
Изобретение-относится к ббласти приборостроения и может быть использовано в устройствах, обеспечивающих получение малых линейньдх перемещений различных объектов. Цель изобретения - повьппение точности перемещений. Baninc 1 охвачен гибкими звеньями 2 и 3 разной толщины. Одни концы гибких звеньев 2 и 3 жестко закреплены на ползунах 4 и 5 соответственно, а другие могут быть закреплены на валике 1. При вращении валика 1 он катится по гибким звеньям 2 и 3. Ползуны 4 и 5 двигаются в одном направлении и совершают перемещение друг относительно друга на величину, определяемую по формуле, приведенной в описании. Так, при толщинах гибких звеньев, равных 1,00 мм и 0,99 мм и угле поворота валика, равном 1 , величина относительного перемещения ползунов составляет 0,044 мкм, 2 ил. (Л X; ю tsD 00 4 СО 2 Фиг)
Составитепь Ю. Сотников Редактор Н. Швыдкая Техред В.Кадар Корректор С. Черни
Заказ 2292/52 Тираж 485 Подписное ВЩШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМНАПРАВЛЕНИЯМ | 1969 |
|
SU436394A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| М.: Наука, 1971, т | |||
| II, с | |||
| ГРОМКО - ГОВОРЯЩИЙ ТЕЛЕФОН | 1920 |
|
SU723A1 |
| Аппарат для подачи папирос в упаковочных машинах | 1924 |
|
SU1873A1 |
