Настоящее изобретение относится к области приборостроения и измерительной технике и может быть использовано для сверхточных перемещений, в частности в устройствах, используемых в области микробиологии, медицины и т.п.
Сверхточный механизм перемещений требует решения, которое позволяет привести в соответствие с необходимой точностью жесткость исполнительных механизмов и особенно выходного звена привода.
Этим требованиям вполне могут удовлетворить механизмы перемещений с гибкими звеньями. В них полностью исключены высшие кинематические пары в последней исполнительной степени, а звенья, участвующие в передаче движений, могут быть напряжены до предельных характеристик.
Известен роликовый механизм перемещения с гибкими звеньями, содержащий корпус, подвижное звено и ролик, охваченный тремя гибкими звеньями, при этом концы верхнего гибкого звена закреплены на подвижном звене, а концы нижнего гибкого звена - на корпусе (а.с. SU N 1430990 А2, G12B 1/00, 26.03.86).
Недостатками данного механизма являются относительная сложность, обусловленная наличием третьего гибкого звена, и ограниченный диапазон перемещений, обусловленный жестким креплением одних из концов гибких звеньев на ролике.
Другим аналогом настоящего изобретения является механизм перемещения с гибкими звеньями, содержащий подвижный и неподвижный ползуны и два гибких звена, охватывающие валик и опорные ролики S-образной петлей, при этом концы гибких звеньев жесткого закреплены на соответствующем ползуне (а.с. SU N 1439686 A1, G12B 5/00, 9/10, 30.07.86).
Недостатком данного устройства является относительная сложность механизма, обусловленная наличием опорных роликов, и увеличенные силы трения, определяемые наличием распорных внутренних сил между валиком, роликами и ползунами, что уменьшает точность позиционирования подвижного ползуна.
Ближайшим аналогом заявленного изобретения является механизм перемещения с гибкими звеньями, описанный в патенте РФ №2160935 С1, кл. G12B 5/00, опубл. 20.12.2000. Известный механизм содержит подвижное звено, которое установлено в направляющих, расположенных на корпусе, валик, гибкие звенья, которые охватывают валик по всей длине окружности его сечения. Валик может быть выполнен ступенчатой формы в продольном сечении и расположен под подвижным звеном. Концы гибких звеньев, закрепленные на корпусе и на подвижном звене, могут быть расположены соответственно по одну или разные стороны относительно оси валика.
Недостатками известного решения являются трудность выполнения, обусловленная сложной формой гибких звеньев, охватывающих валик, а также низкая надежность устройства, связанная с выполнением гибких связей различной ширины, что может привести к их деформации и обрыву.
Задачей настоящего изобретения является устранение вышеуказанных недостатков.
Технический результат настоящего изобретения заключается в достижении сверхточных перемещений, в упрощении конструкции механизма перемещения и увеличении диапазона перемещений.
Технический результат настоящего изобретения заключается в том, что механизм перемещения включает два конструкционных элемента, выполненных с возможностью взаимного одномерного линейного перемещения, цилиндрический валик, выполненный с возможностью поворота вокруг его продольной оси симметрии, перпендикулярной оси взаимного перемещения конструкционных элементов, и свободного линейного перемещения вдоль оси взаимного перемещения конструкционных элементов, и две группы гибких звеньев, охватывающих цилиндрический валик по части длины окружности его сечения в противоположных направлениях, таким образом, что концы гибких звеньев расположены параллельно оси взаимного перемещения конструкционных элементов и жестко закреплены на них. Причем число гибких звеньев, по крайней мере, в одной из групп составляет не менее двух. Кроме того, один из концов каждого гибкого звена закреплен на одном конструкционном элементе, а другой конец - на другом конструкционном элементе. Гибкие звенья имеют форму, которая обеспечивает возможность поворота цилиндрического валика на угол более 360° без проскальзывания относительно них.
В соответствии с частными случаями осуществления устройство имеет следующие конструктивные особенности.
Гибкие звенья имеют покрытие, повышающее трение.
Гибкие звенья могут иметь прямоугольную форму.
Гибкие звенья могут иметь трапециевидную форму.
Сущность настоящего изобретения поясняется следующими иллюстрациями.
Фиг.1 - изометрическое изображение устройства;
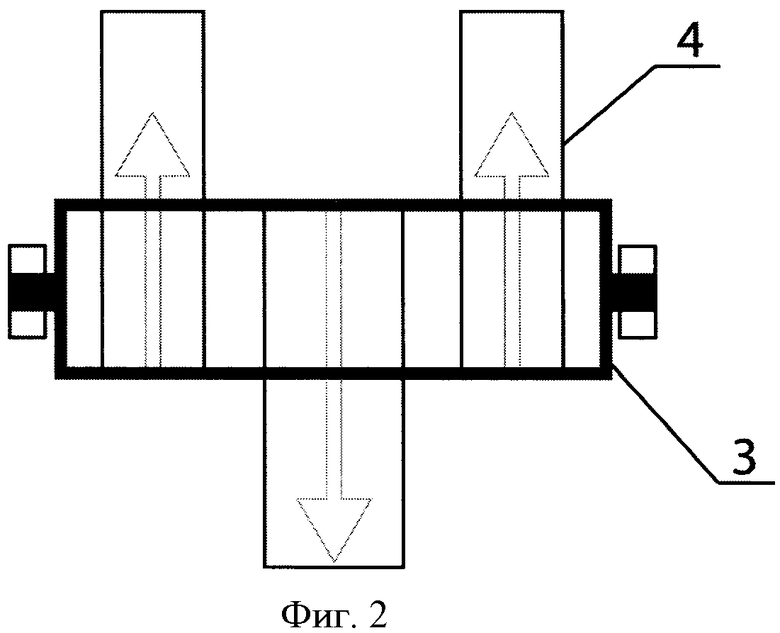
Фиг.2 - изображение валика с тремя гибкими звеньями.
Устройство включает часть 1 и часть 2, валик 3, гибкое звено 4. Части 1 и 2 выполнены идентичными, т.е. имеют одинаковую форму (предпочтительно с формообразованием на основе прямоугольного параллелепипеда), размер и массу. При фиксации одной из частей и вращении валика 3 другая часть будет перемещаться относительно нее, вдоль горизонтальной или вертикальной оси в зависимости от позиционирования устройства. Выполнение частей 1 и 2 идентичными обеспечит повышение надежности работы устройства, поскольку в этом случае достигается небольшой градиент силы натяжения по длине гибких звеньев 4.
Механизм перемещения с гибкими звеньями работает следующим образом.
Гибкие звенья 4 при функционировании устройства натянуты на валик 3 до величины, определяемой пределом упругости материала звеньев 3, на них нанесено покрытие, повышающее трение. При этом в частном случае выполнения гибкие звенья 4 имеют прямоугольную или трапециевидную форму и охватывают валик 3 с образованием петель в виде хомута (петель С-образной формы). При повороте валика 3 на угол α он катится по гибким звеньям 4, при этом часть 2 перемещается относительно другой зафиксированной части 1. Величина перемещения части 2 зависит от угла поворота валика 3, что позволяет получить очень малые относительные перемещения.
На фиг.2 показана конструкция валика 3 с двумя группами гибких звеньев 4, при этом одна группа включает два краевых гибких звена 4, охватывающих валик 3 в одном направлении, а вторая группа содержит одно центральное гибкое звено 4, охватывающее валик 3 в направлении, противоположном направлению охвата краевыми гибкими звеньями 4. Охват цилиндрической поверхности валика 3 гибкими звеньями 4 является равномерным, то есть краевые гибкие звенья 4 расположены на равном расстоянии от оснований цилиндрической поверхности валика 3 и от центрального гибкого звена 4. При таком охвате силы, действующие на валик 3 со стороны разноориентированных гибких звеньев 4, компенсируют друг друга. При этом обеспечивается нулевой момент сил. Кроме того, валик 3 может иметь замкнутые радиальные канавки на цилиндрической поверхности для расположения и фиксации в них гибких звеньев 4. Такое выполнение во время эксплуатации исключает сдвиг гибких звеньев 4 относительно цилиндрической поверхности валика 3.
Выполнение гибких звеньев 4 параллельными направлению точных перемещений обеспечит при вращении валика 3 очень малые перемещения подвижной части 2 (не более 10 нм).
Напротив, если концы гибких звеньев 4 образуют некоторый существенный угол β с осью, совпадающей с направлением точных перемещений, то влияние перемещения валика 3 будет препятствовать достижению технического результата, заключающегося в обеспечении сверхточных перемещений.
Это можно обосновать следующим. Смещение конца гибкого звена 4 вдоль направления точных перемещений Δу будет составлять следующую величину:
Δу=tg(β)∗Δx,
где Δх - смещение валика 3, β - угол, образованный между концом гибкого звена и осью, совпадающей с направлением точных перемещений.
Приведенная формула предполагает свободное перемещение концов гибких звеньев 4 вдоль направления точных перемещений. Действительно, концы гибких звеньев 4 жестко закреплены к обеим частям 1 и 2. Поэтому при несоблюдении параллельного расположения концов гибких звеньев 4 смещение валика 3 будет приводить к появлению некомпенсированных напряжений в гибких звеньях 4 и к их деформации. Следствием этого будет появление неконтролируемого взаимного перемещения частей 1 и 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ С ГИБКИМИ ЗВЕНЬЯМИ (ВАРИАНТЫ) | 2000 |
|
RU2160935C1 |
| ЛЕГКИЙ САМОЛЕТ | 1991 |
|
RU2007333C1 |
| ЦЕПЬ ПРИВОДНАЯ ПЛАСТИНЧАТАЯ, ИМЕЮЩАЯ ОТКРЫТЫЕ ШАРНИРЫ КАЧЕНИЯ С ЦИЛИНДРИЧЕСКОЙ ФОРМОЙ ЭЛЕМЕНТА ЗАЦЕПЛЕНИЯ | 2009 |
|
RU2472049C2 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЯ НА ПОВЕРХНОСТЬ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 2011 |
|
RU2477183C1 |
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1374287A1 |
| Поворотный электрический соединитель | 1986 |
|
SU1403164A1 |
| СПОСОБ И ОБОРУДОВАНИЕ С РЕЛЬЕФНЫМ БАРАБАНОМ ДЛЯ ИЗГОТОВЛЕНИЯ ЗАПОЛНИТЕЛЯ ДЛЯ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ | 2011 |
|
RU2561973C1 |
| ИЗОГНУТАЯ ВО МНОЖЕСТВЕ НАПРАВЛЕНИЙ БАЛКА, УСТРОЙСТВО РОЛИКОВОГО ФОРМОВАНИЯ И СПОСОБ | 2009 |
|
RU2503517C2 |
| АДАПТИВНОЕ РАЗМОТОЧНОЕ УСТРОЙСТВО | 2007 |
|
RU2337873C1 |
| БЕСКЛАПАННЫЙ ОРБИТАЛЬНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2285127C2 |
Изобретение относится к области приборостроения, в частности к измерительной технике, и может быть использовано для сверхточных перемещений, в частности в устройствах, используемых в области микробиологии, медицины и т.п. Механизм перемещения включает два конструкционных элемента, выполненных с возможностью взаимного одномерного линейного перемещения, цилиндрический валик, выполненный с возможностью поворота вокруг его продольной оси симметрии, перпендикулярной оси взаимного перемещения конструкционных элементов, и свободного линейного перемещения вдоль оси взаимного перемещения конструкционных элементов, и две группы гибких звеньев, охватывающих цилиндрический валик по части длины окружности его сечения в противоположных направлениях таким образом, что концы гибких звеньев расположены параллельно оси взаимного перемещения конструкционных элементов и жестко закреплены на них. Причем число гибких звеньев, по крайней мере, в одной из групп составляет не менее двух. Кроме того, один из концов каждого гибкого звена закреплен на одном конструкционном элементе, а другой конец - на другом конструкционном элементе. Гибкие звенья имеют форму, которая обеспечивает возможность поворота цилиндрического валика на угол более 360° без проскальзывания относительно них. Технический результат заключается в достижении сверхточных перемещений, в упрощении конструкции механизма перемещения и увеличении диапазона перемещений. 3 з.п. ф-лы, 2 ил.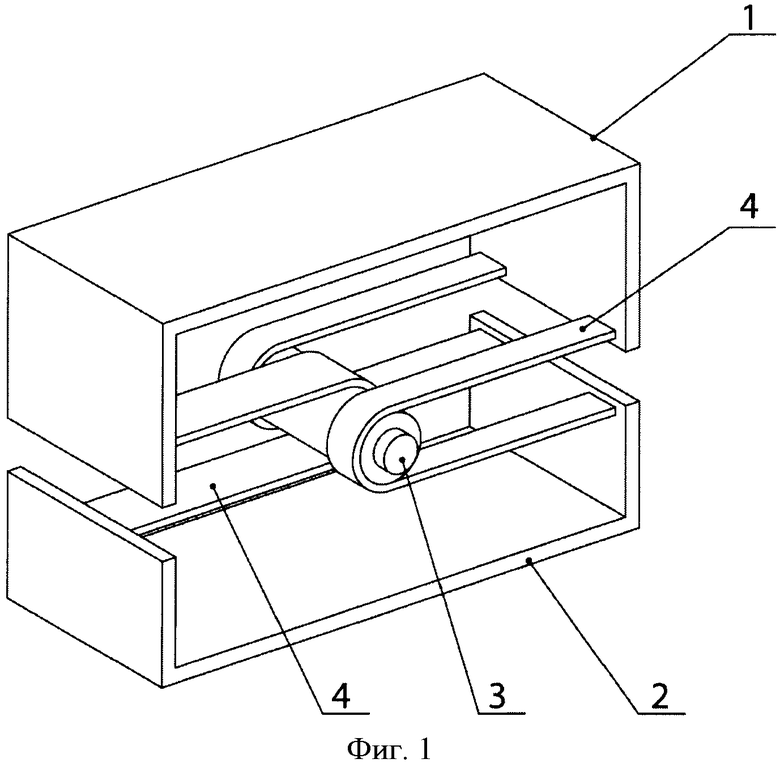
1. Механизм перемещения, включающий два конструкционных элемента, выполненных с возможностью взаимного одномерного линейного перемещения, цилиндрический валик, выполненный с возможностью поворота вокруг его продольной оси симметрии, перпендикулярной оси взаимного перемещения конструкционных элементов, и свободного линейного перемещения вдоль оси взаимного перемещения конструкционных элементов, и две группы гибких звеньев, охватывающих цилиндрический валик по части длины окружности его сечения в противоположных направлениях, таким образом, что концы гибких звеньев расположены параллельно оси взаимного перемещения конструкционных элементов и жестко закреплены на них, причем число гибких звеньев, по крайней мере, в одной из групп составляет не менее двух, отличающийся тем, что один из концов каждого гибкого звена закреплен на одном конструкционном элементе, а другой конец - на другом конструкционном элементе, кроме того, гибкие звенья имеют форму, которая обеспечивает возможность поворота цилиндрического валика на угол более 360° без проскальзывания относительно них.
2. Механизм перемещения по п.1, отличающийся тем, что гибкие звенья имеют покрытие, повышающее трение.
3. Механизм перемещения по п.1 или 2, отличающийся тем, что гибкие звенья имеют прямоугольную форму.
4. Механизм перемещения по п.1 или 2, отличающийся тем, что гибкие звенья имеют трапециевидную форму.
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ С ГИБКИМИ ЗВЕНЬЯМИ (ВАРИАНТЫ) | 2000 |
|
RU2160935C1 |
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1439686A1 |
| Роликовый механизм перемещения | 1986 |
|
SU1430990A2 |
| DE 4208149 А1, 17.09.1992 | |||
| DE 8807313 U1, 04.08.1988. | |||

