Изобретение относится к машиностроению и может быть использовано в различных отраслях промышленности для обеспечения высокоточных установочных g перемег.ений.
Цель изобретения - упрощение конструкции за счет сокращения числа входящих в нее деталей.
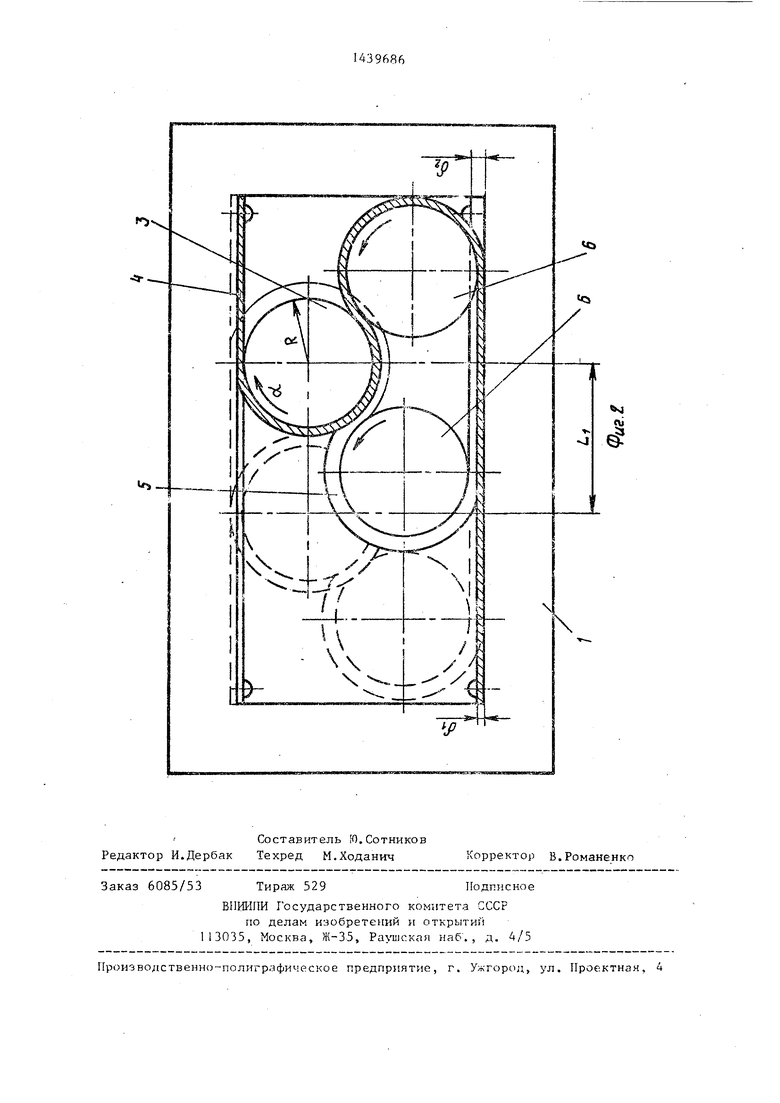
На фиг. 1 изображен механизм пере-10 мещений с гибкими связями, общий вид; на фиг, 2 - расчетная схема механизма (подвижный ползун не показан).
Механизм перемещения с гибкими зве- льями содержит неподвижньй 1 и под- 15 вижный 2 ползуны, валик 3, гибкие звенья 1 и 5 разной толщины и два опорных ролика 6, Каждое из гибких звеньев 4 и 5 охватьшает валик 3 и один из опорных роликов 6 прямой и об20 ратной S-образной петлей, а концы гибких звеньев 4 и 5 крепятся к ползунам 1 и 2 соответственно. Диаметрь опорных роликов 6 произвольные. Чтобы исключить проскальзывание валика 3 25 относительно гибких звеньев 4 и 5, последние натянуты до величины, определяемой пределом упругости материала звеньев, и на них нанесено покрытие, повышающее трение. Ползуны 1 и 230 мэгут быть йьтолнень в виде рамок или Г-образного профиля.
Механизм с гибкими звеньями рабо- тает следую11 и ; образом.
При повороте валика 3 на угол d (фиг, ) он вместе с опорными роликами 6 катится по гибкиг- звеньйм 4 и 5, лежа1цим на ползунах 1 и 2 соответственно. Относительно ползуна 1 ось ва-40
лика 3 перемещается на величину Т, равную
L, (г. :..).,
где с/- угол поворота валика 3, град; г - радиус валика 3; ,1/,- толл1ина гибкого звена 4. Относительно ползуна 2 ось валика 3 перемещается на величину L, равйую
ч ти -/- :
где Л- толщина гибкого звена 5,
Таким образом, перемеп(енпе ползуна 2 относительно ползуна 1 составляет величину d L
.т-т -. - /i- м ., TBD -rВыполнение петел, образуемых гибг кими звеньями, S-образной формы и ориентация их одна относительно другой в зеркальном отражении позволило упростить конструкцию механизма.
Формула изобретения
Механизм перемещения с гибкими звеньями, содержаищй подвютный и неподвижный ползуны к два гибких звена различной тол цины; концы каждого из которых жестко затчфеплеиы на соответствующем ползуне с возможностью охвата валика и опорного ролгака с образованием петли, о т л и ч а ю щ м и - с я тем, что, с целью упрощения конструкции, пе;Тли, образуемые гибкими. звеньями, выполнены Е-образной формы
r
i
c
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1374287A1 |
| Механизм перемещения с гибкими звеньями | 1984 |
|
SU1228149A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ С ГИБКИМИ ЗВЕНЬЯМИ (ВАРИАНТЫ) | 2000 |
|
RU2160935C1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2469426C1 |
| Механизм угловых перемещений с гибкими звеньями | 1987 |
|
SU1506486A1 |
| Роликовый механизм перемещения | 1984 |
|
SU1221682A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПРОВОЛОЧНЫХ ИЗДЕЛИЙ СЛОЖНОЙ КОНФИГУРАЦИИ | 1992 |
|
RU2050216C1 |
| Устройство для подачи шнура в автомат для его обработки | 1972 |
|
SU449866A1 |
| Устройство для поштучной выдачи деталей | 1983 |
|
SU1143573A1 |
| НЕСУЩАЯ МЕХАНИЧЕСКАЯ СИСТЕМА | 2006 |
|
RU2312761C1 |
Изобретение относится к машиностроению и может быть использова а но для обеспечения высокоточных установочных перемещений в различных отраслях промышленности. Механизм перемещения с гибкими звеньями содержит неподвижный 1 и подвижный 2 ползуны и гибкие звенья (ГЗ) 4 и 5 разной толщины. Каждое ГЗ 4 и 5 охватывает валик 3 и один из опорных роликов 6 прямой и обратной S-образной петлей, а их концы крепятся к ползунам. Для исключения проскальзывания валика 3 относительно ГЗ 4 и 5,последние натянуты до величины, определяемой пределом упругости материала ГЗ, и на них нанесено покрытие, повышающее трение. Конструкция механизма проста. 2 ил. с 9 (Л -5 4 оо ;о сь сх о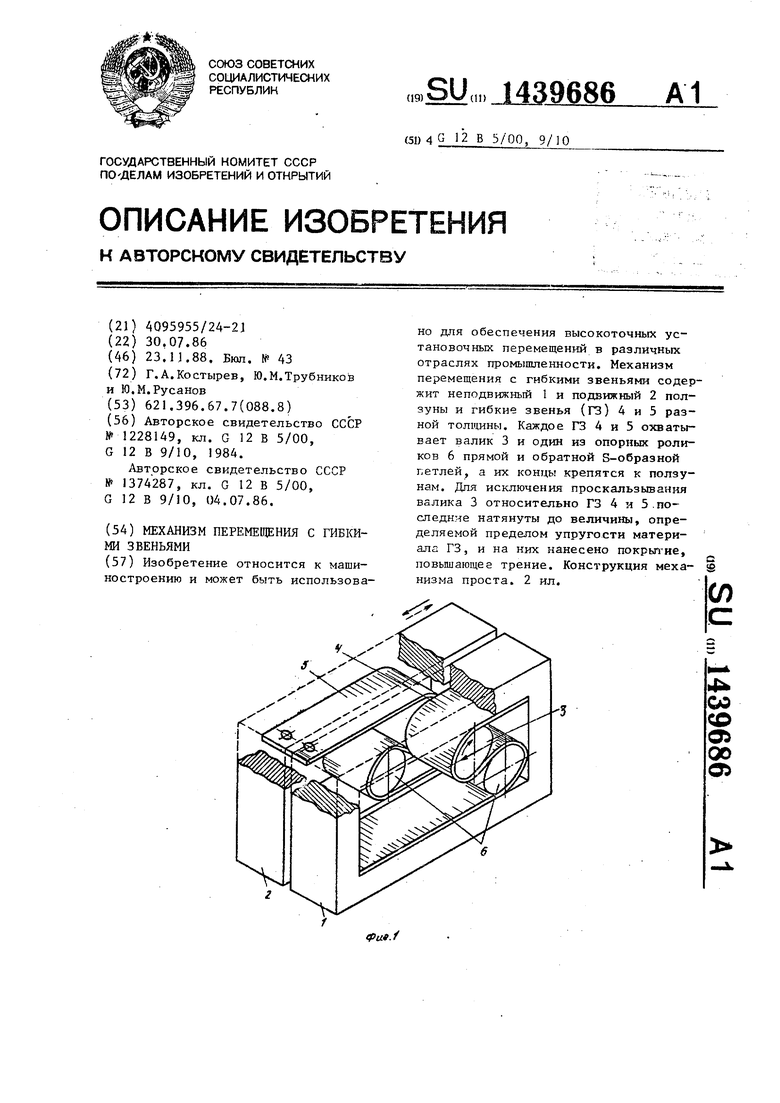
| Механизм перемещения с гибкими звеньями | 1984 |
|
SU1228149A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1374287A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
