6
со
4
to
00
/ фие-f
11
Изобретение относится к измерительной технике и точному приборо строению и может быть использовано для осуществления высокоточных установочных перемещений элементов приборов.
Цель изобретения - расширение эксплуатационных возможностей путем увеличения диапазона перемещений, обеспечиваемых механизмом.
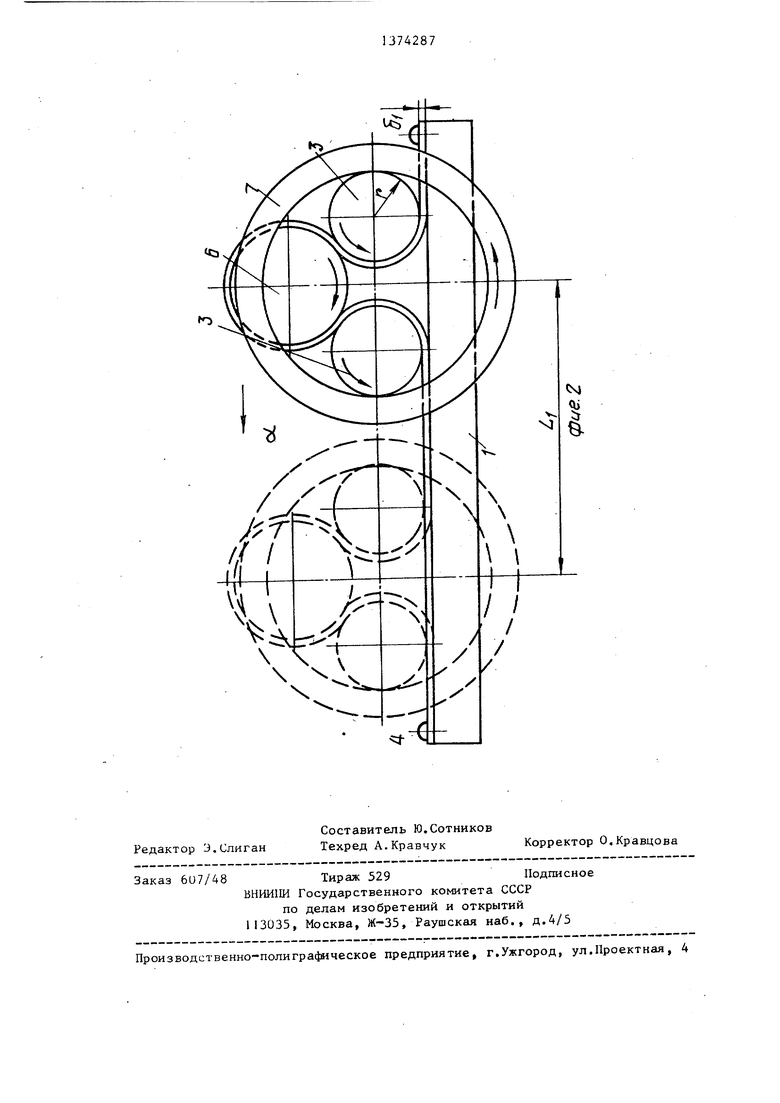
На фиг,1 схематически изображен механизм с гибкими звеньями, общий вид; на фиг.2 - расчетная схема механизма.
Механизм перемещения с гибкими звеньями содержит неподвижный 1 и подвижный 2 ползуны, два валика 3, гибкие звенья 4 и 5 разной толщины, два промежуточных ролика 6 и одно или несколько стягивающих колец 7. Каждое из гибких звеньев 4 и 5 охватывает оба валика 3 и один из роликов 6 51 -образной петлей и закреплено cвoим i концами к ползуну 1 или 2 соответственно. Диаметры роликов 6 выбираются произвольно. Чтобы исключить проскальзывание гибких звеньев 4 и 5 относительно валиков 3, послед
L,
, (г + 180
1- 2
где rf, - толщина гибкого звена 5.
Таким образом, величина перемещения ползуна 2 относительно ползуна 1 составит величину /зЬ, определяемую выражением
dL L - L,
lid:
Teo
(
A -Л
).
Анализ приведенной формулы показывает, что величина относительного перемещения ползунов 1 и 2 зависит от разности толщин гибких звеньев 4 и 5 и от угла поворота валика 3, который может быть больше 360°, так
как валики 3 в механизме данной конструкции могут совершать несколько оборотов.
Оснащение механизма дополнительным валиком, промежуточными роликами и одним или несколькими стягивакг щими кольцами, установленными на валиках с возможностью перекатывания последних по их внутреньшм цилиндрическим поверхностям, а также установки каждого из гибких звеньев с воз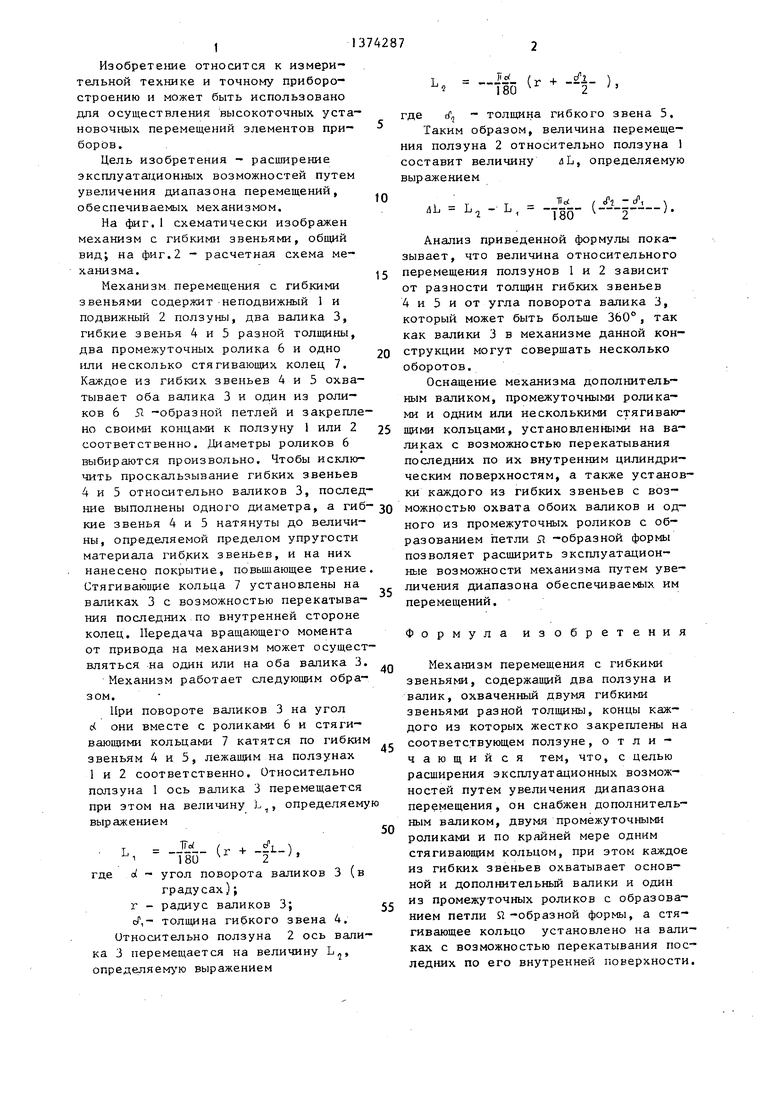
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1439686A1 |
| Механизм перемещения с гибкими звеньями | 1984 |
|
SU1228149A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ С ГИБКИМИ ЗВЕНЬЯМИ (ВАРИАНТЫ) | 2000 |
|
RU2160935C1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2469426C1 |
| Роликовый механизм перемещения | 1984 |
|
SU1221682A1 |
| Механизм угловых перемещений с гибкими звеньями | 1987 |
|
SU1506486A1 |
| Роликовый механизм перемещения | 1986 |
|
SU1430990A2 |
| Устройство для обработки деталей сложной формы | 1978 |
|
SU742038A1 |
| Станция погрузки-разгрузки перемещаемого по пневмотрубопроводу контейнера с торцовыми крышками | 1987 |
|
SU1497133A1 |
| ЛЕГКИЙ САМОЛЕТ | 1991 |
|
RU2007333C1 |
Изобретение может быть использовано для осуществления высокоточ иых установочных перемещений элементов приборов и служит для расширения эксплуатационных возможностей устройства. Каждое из гибких звеньев 4 и 5 охватывает оба валика (В) 3 и один из роликов 6 S1-образной петлей и закреплено своими концами к ползуну (П) 1 или 2 соответственно.При повороте В 3 на угол d- они вместе с роликами 6 и стягивающими кольцами 7 катятся по гибким звеньям 4 и 5. Относительно 11 I ось В 3 перемещается на величину о(, . Относительно П 2 ось валика перемещается на величину ef. Величина относительного) перемещения uai Ш И 2 зависит от разности толщин гибких звеньев 4 и 5 и от угла поворота В 3, который может совершать несколько оборотов. Таким образом увеличивается диапазон перемещений,обеспечиваемых механизмом. 2 ил. Ш (Л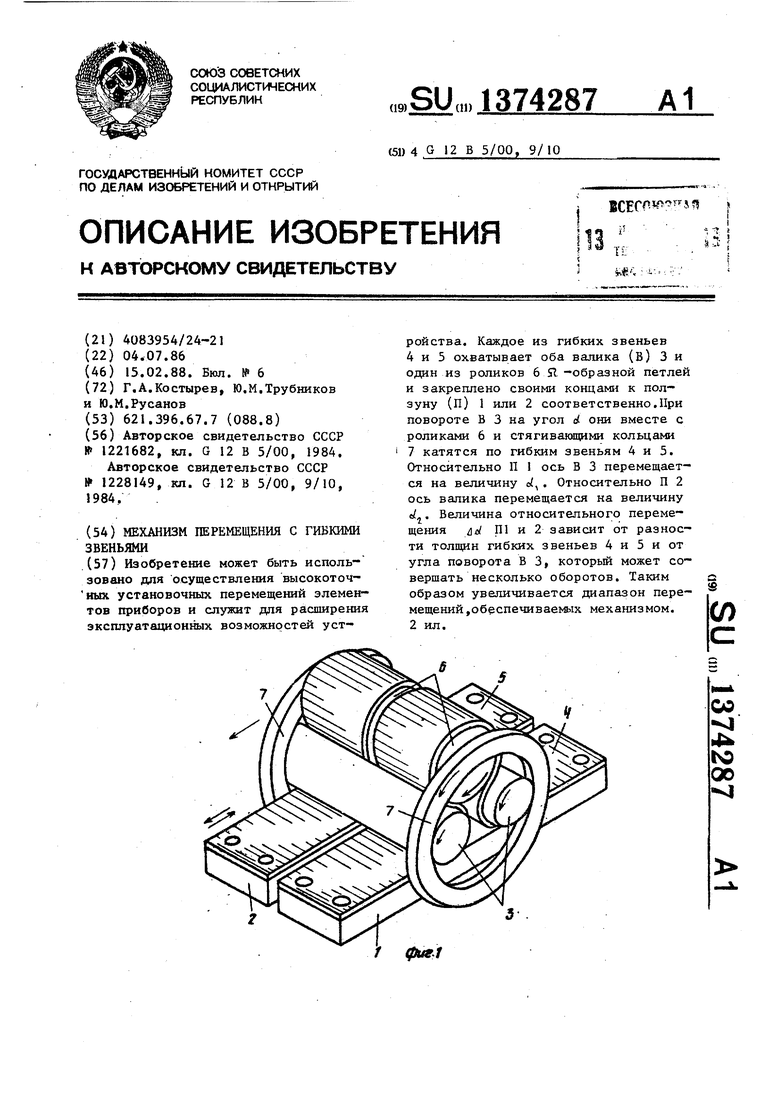
ние выполнены одного диаметра, а гиб- зо можностью охвата обоих валиков и одкие звенья 4 и 5 натянуты до величины, определяемой пределом упругости материала гибких звеньев, и на них нанесено покрытие, повьш1ающее трение. Стягивающие кольца 7 установлены на валиках 3 с возможностью перекатывания последних по внутренней стороне колец. Передача вращающего момента от привода на механизм может осуществляться на один или на оба валика 3.
Механизм работает следующим образом.
При повороте валиков 3 на угол с они вместе с роликами 6 и стяги- ваюшями кольцами 7 катятся по гибким звеньям 4 и 5, лежаш 1М на ползунах 1 и 2 соответственно. Относительно ползуна 1 ось валика 3 перемещается при этом на величину L, определяемую выражением
35
ного из промежуточных роликов с образованием петли л -образной формы позволяет расширить эксплуатадион- ные возможности механизма путем увеличения диапазона обеспечиваемых им перемещений.
Формула
изобретения
40
45
50
Механизм перемещения с гибкими звеньями, содержащий два ползуна и валик, охваченный двумя гибкими звеньями разной толщины, концы каждого из которых жестко закреплены на соответствующем ползуне, отличающий ся тем, что, с целью расширения эксплуатационных возможностей путем увеличения диапазона перемещения, он снабжен дополнительным валиком, двумя промежуточными роликами и по крайней мере одним стягивающим кольцом, при этом каждое из гибких звеньев охватывает основной и дополнительный валики и один из промежуточных роликов с образованием петли S7-образной формы, а стягивающее кольцо установлено на валиках с возможностью перекатывания последних по его внутренней поверхности.
L.
ТЫ
Iso
(r-.-f-),
где
(i
d - угол поворота валиков 3
градусах);
г - радиус валиков 3; of,- толщина гибкого звена 4. Относительно ползуна 2 ось валика 3 перемещается на величину L, определяем ю выражением
ного из промежуточных роликов с образованием петли л -образной формы позволяет расширить эксплуатадион- ные возможности механизма путем увеличения диапазона обеспечиваемых им перемещений.
Формула
изобретения
.
ю
40
45
50
55
Механизм перемещения с гибкими звеньями, содержащий два ползуна и валик, охваченный двумя гибкими звеньями разной толщины, концы каждого из которых жестко закреплены на соответствующем ползуне, отличающий ся тем, что, с целью расширения эксплуатационных возможностей путем увеличения диапазона перемещения, он снабжен дополнительным валиком, двумя промежуточными роликами и по крайней мере одним стягивающим кольцом, при этом каждое из гибких звеньев охватывает основной и дополнительный валики и один из промежуточных роликов с образованием петли S7-образной формы, а стягивающее кольцо установлено на валиках с возможностью перекатывания последних по его внутренней поверхности.
| Роликовый механизм перемещения | 1984 |
|
SU1221682A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Механизм перемещения с гибкими звеньями | 1984 |
|
SU1228149A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
