Изобретение относится к устройствам для сборки и сварки крупногабаритных цилиндрических изделий и может быть использовано в различных областях машиностроения, в частности в атомном машино- и котло- строении для сборки и сварки изделий атомных электростанций.
Цель изобретения - повышение качества путем устранения дрейфа изделия.
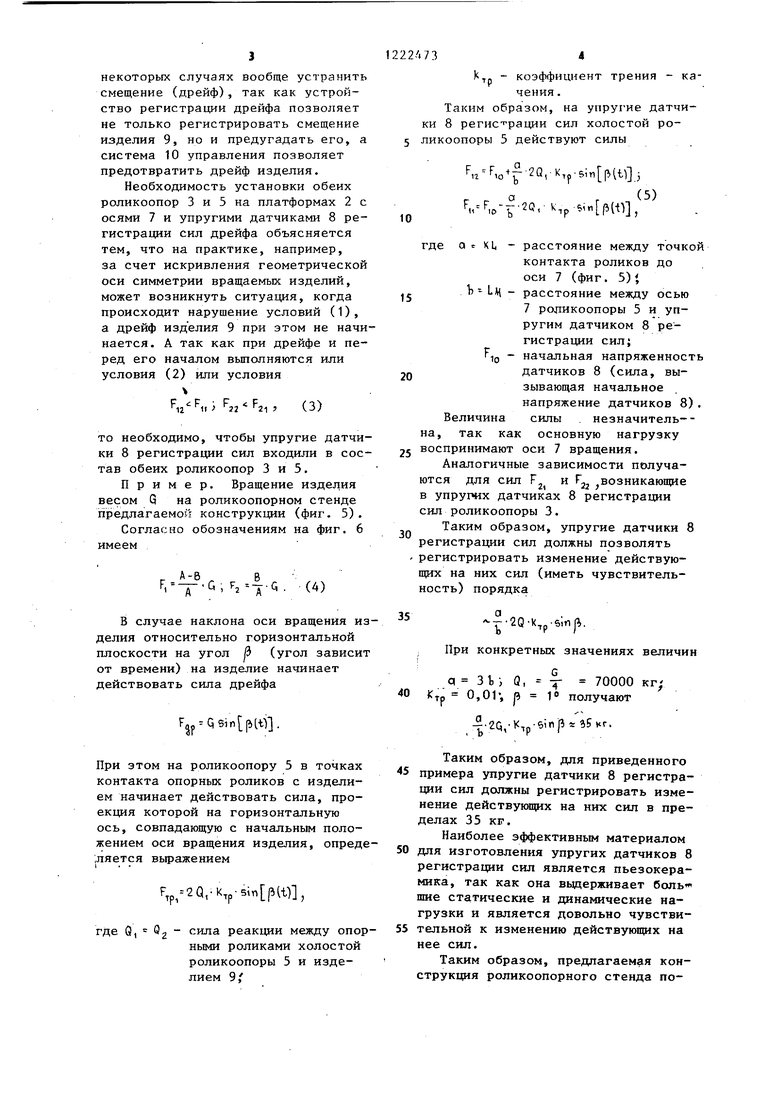
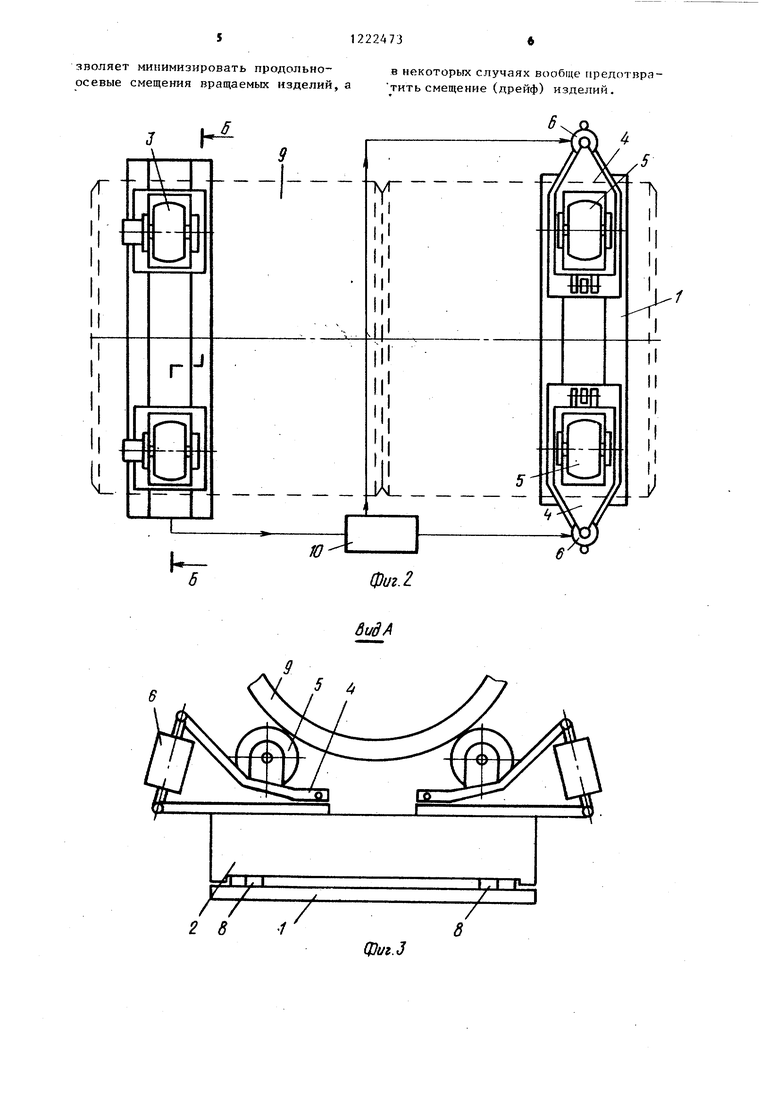
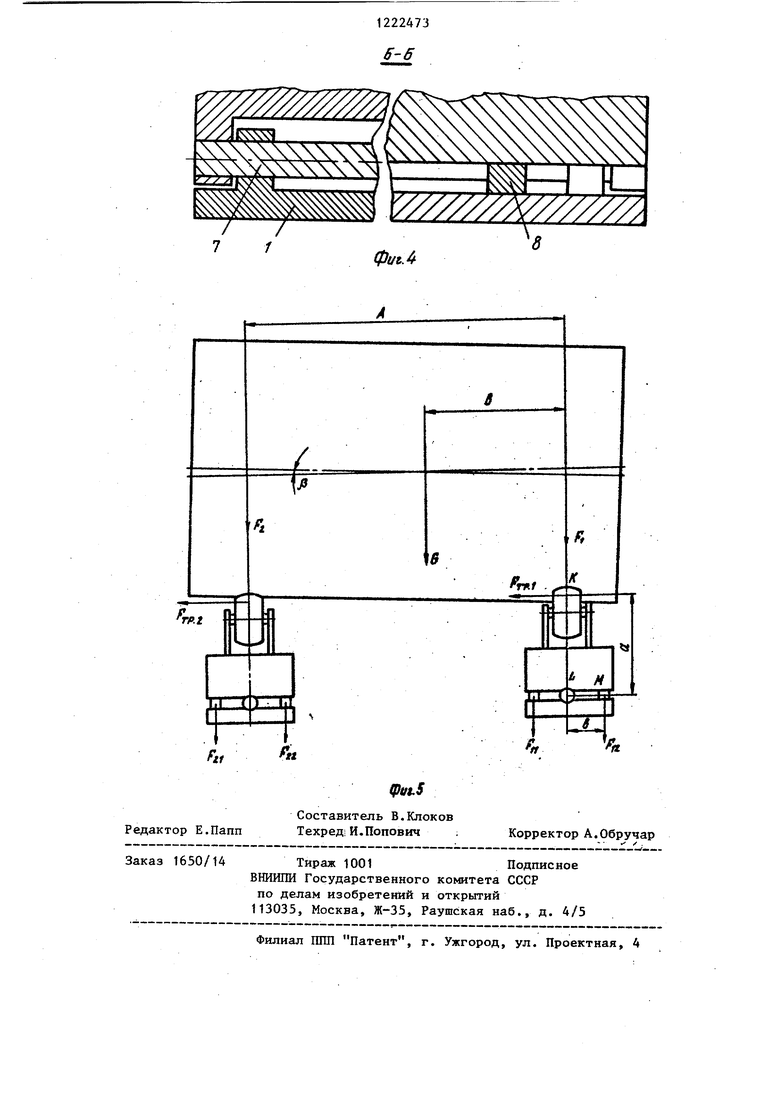
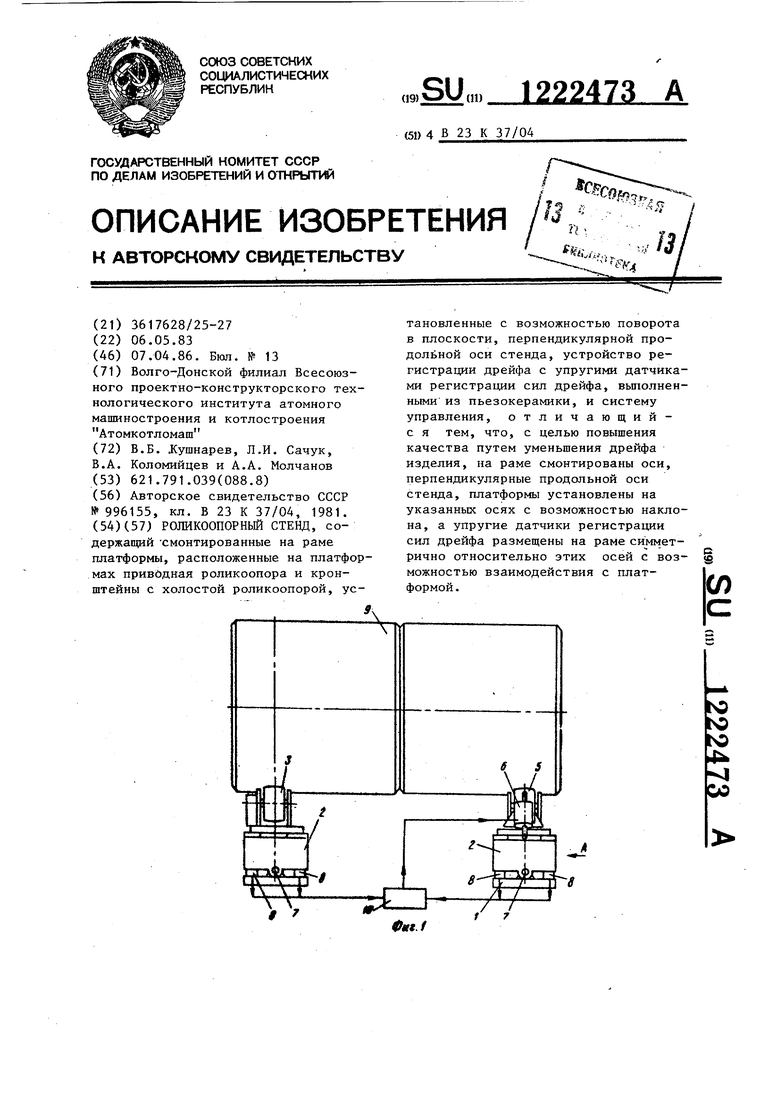
На фиг. 1 изображен роликоопор- ный стенд, общий вид; на фиг. 2 - то же, вид сверху; на (. 3 - вид А на фиг. 1; на фиг. 4 - { азрез Б-Б на фиг. 2, на фиг. 5 - схема действующих сил.
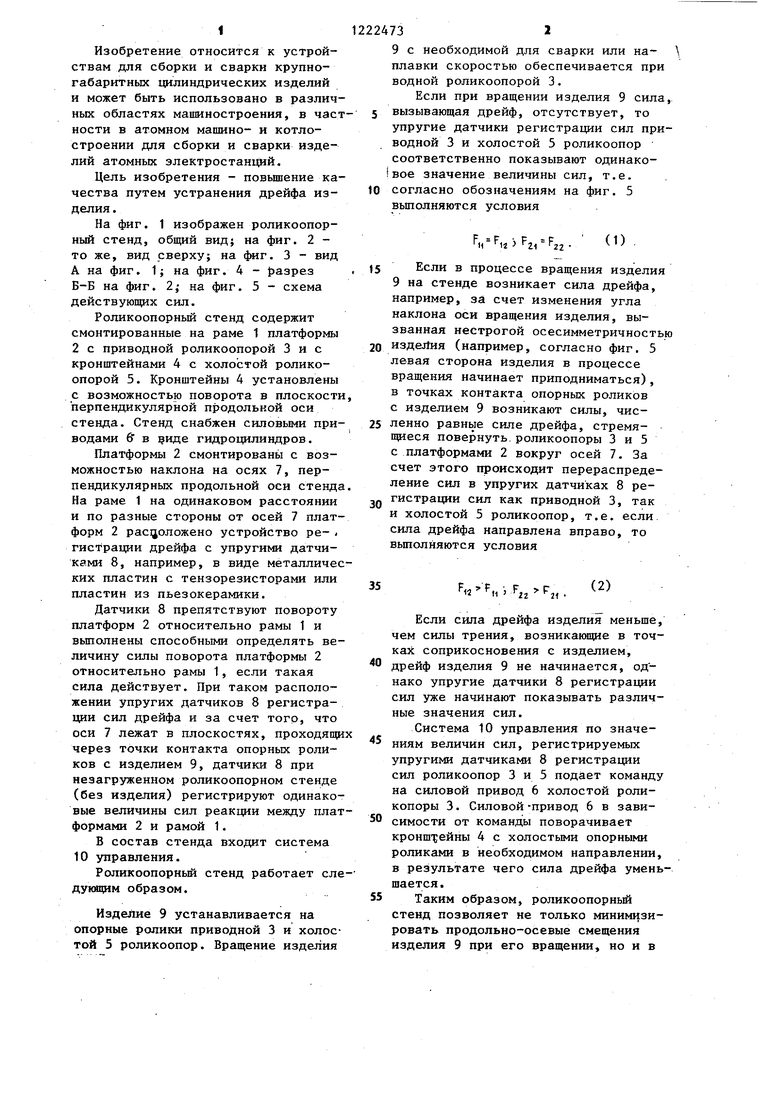
Роликоопорньш стенд содержит смонтированные на раме 1 платформы 2 с приводной роликоопорой 3 и с кронштейнами 4 с холостой роликоопорой 5. Кронштейны 4 установлены с возможностью поворота в плоскости перпендикулярной продольной оси
стенда. Стенд снабжен силовыми приводами 6 в эиде гидроцилиндров.
Платформы 2 смонтированы с возможностью наклона на осях 7, перпендикулярных продольной оси стенда На раме 1 на одинаковом расстоянии и по разные стороны от осей 7 платформ 2 расцоложено устройство ре- гистрации дрейфа с упругими датчиками 8, например, в виде металлических пластин с тензорезисторами или пластин из пьезокерамики.
Датчики 8 препятствуют повороту платформ 2 относительно рамы 1 и вьшолнены способными определять величину силы поворота платформы 2 относительно рамы 1, если такая сила действует. При таком расположении упругих датчиков 8 регистрации сил дрейфа и за счет того, что оси 7 лежат в плоскостях, проходящи через точки контакта опорных роликов с изделием 9, датчики 8 при незагруженном роликоопорном стенде (без изделия) регистрируют одинаковые величины сил реакции между платформами 2 и рамой 1.
В состав стенда входит система 10 управления.
Роликоопорный стенд работает еле дукяцим образом.
Изделие 9 устанавливается на опорные ролики приводной 3 и холостой 5 роликоопор. Вращение изделия
2224732
9 с необходимой для сварки или на- плавки скоростью обеспечивается при водной роликоопорой 3.
Если при вращении изделия 9 сила,
5 вызывающая дрейф, отсутствует, то упругие датчики регистрации сил приводной 3 и холостой 5 роликоопор соответственно показывают одинако- вое значение величины сил, т.е.
10 согласно обозначениям на фиг. 5 вьшолняются условия
F,rPi.P
Zl °
(1)
Если в процессе вращения изделия 9 на стенде возникает сила дрейфа, например, за счет изменения угла наклона оси вращения изделия, вызванная нестрогой осесимметричностью
изделия (например, согласно фиг. 5 левая сторона изделия в процессе вращения начинает приподниматься), в точках контакта опорных роликов с изделием 9 возникают силы, численно равные силе дрейфа, стремя- преся повернуть, роликоопоры 3 и 5 с платформами 2 вокруг осей 7. За счет этого происходит перераспределение сил в упругих датчиках 8 регистрации сил как приводной 3, так и холостой 5 роликоопор, т.е. если, сила дрейфа направлена вправо, то выполняются условия
35
F« РН
12 и
(2)
Если сила дрейфа изделия меньше, чем силы трения, возниканнцие в точках соприкосновения с изделием, дрейф изделия 9 не начинается, однако упругие датчики 8 регистрации сил уже начинают показывать различные значения сил.
Система 10 управления по значениям величин сил, регистрируемых упругими датчиками 8 регистрации сил роликоопор 3 и 5 подает команду на силовой привод 6 холостой роли- копоры 3. Силовой-привод 6 в зависимости от команд|ы поворачивает кронш ейны 4 с холостыми опорными роликами в необходимом направлении, в результате чего сила дрейфа уменьшается.
Таким образом, роликоопорный стенд позволяет не только минимизировать продольно-осевые смещения изделия 9 при его вращении, но и в
некоторых случаях вообще устранить смещение (дрейф), так как устройство регистрации дрейфа позволяет не только регистрировать смещение изделия 9, но и предугадать его, а система 10 управления позволяет предотвратить дрейф изделия.
Необходимость установки обеих роликоопор 3 и 5 на платформах 2 с осями 7 и упругими датчиками 8 регистрации сил дрейфа объясняется тем, что на практике, например, за счет искривления геометрической оси симметрии вращаемых изделий, может возникнуть ситуация, когда происходит нарушение условий (1), а дрейф изделия 9 при этом не начи нается. А так как при дрейфе и перед его началом выполняются или условия (2) или условия
, (3)
то необходимо, чтобы упругие датчики 8 регистрации сил входили в состав обеих роликоопор 3 и 5.
Пример. Вращение изделия весом G на роликоопорном стенде предлагаемой конструкции (фиг. 5).
Согласно обозначениям на фиг. 6 имеем
F ,, 2-тС,. W
в случае наклона оси вращения из делия относительно горизонтальной плоскости на угол |3 (угол зависит от времени) на изделие начинает действовать сила дрейфа
Гд -а51п ьм.
При этом на роликоопору 5 в точках контакта опорных роликов с изделием начинает действовать сила, проекция которой на горизонтальную ось, совпадающую с начальным положением оси вращения изделия, определяется выражением
,-K,p-Bi4pW,
где QI - 2 реакции между опорными роликами холостой роликоопоры 5 и изделием 9,
1222Д734
- коэффициент трения - качения.
Таким образом, на упругие датчики 8 регис- рации сил холостой ро- 5 ликоопоры 5 действуют силы
1 0 2QrKTp-5in | lt)5
а
F,, F,--.2Q,.K,p.5,,
(5)
5
0
0
где а КЦ - расстояние между точкой контакта роликов до оси 7 (фиг. 5)} Ь L - расстояние между осью 7 роликоопоры 5 и упругим датчиком 8 регистрации сил;
f-iQ начальная напряженность датчиков 8 (сила, вызывающая начальное напряжение датчиков 8). Величина силы . незначитель-- на, так как основную нагрузку 5 воспринимают оси 7 вращения.
Аналогичные зависимости получаются для сил Г и Tj возникающие в упрурих датчиках 8 регистрации сил роликоопоры 3.
Таким образом, упругие датчики 8 регистрации сил должны позволять регистрировать изменение действующих на них сил (иметь чувствительность) порядка
35
,p.6in|i. При конкретных значениях величин
q ЗЬ i Q, - 70000 кг; 0 тр OjOl, р 1 получают
.2Q, K -einp SHr,
Р
Таким образом, для приведенного примера упругие датчики 8 регистрации сил должны регистрировать изменение действующих на них сил в пределах 35 кг.
Наиболее эффективным материалом для изготовления упругих датчиков 8 регистрации сил является пьезокера- мика, так как она выдерживает боль« щие статические и динамические нагрузки и является довольно чувстви- тельной к изменению действующих на нее сил.
Таким образом, предлагаемая конструкция роликоопорного стенда позволяет минимизировать продольно- в некоторых случаях вообще прелотвра- осевые смещения вращаемых изделий, а тить смещение (дрейф) изделий.
б
1
(
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования положения обечайки | 1980 |
|
SU912428A1 |
| Стенд для сборки и вращения тяжеловесных цилиндрических изделий в процессе сварки | 1981 |
|
SU1109301A1 |
| Установка для обработки цилиндрических изделий | 1990 |
|
SU1773656A1 |
| Роликовый стенд для сборки и сварки цилиндрических изделий | 1981 |
|
SU1031706A1 |
| СТЕНД ДЛЯ ВОЗДУШНО-ПЛАЗМЕННОЙ РЕЗКИ ТРУБ | 1994 |
|
RU2089366C1 |
| Роликовый стенд для вращения цилиндрических изделий при сборке и сварке | 1981 |
|
SU1031707A1 |
| Стенд для сборки и вращения цилиндрических изделий при сварке | 1984 |
|
SU1247219A1 |
| Устройство для образования флюсовой подушки | 1981 |
|
SU961890A1 |
| Исполнительный механизм системы антидрейфа цилиндрического изделия | 1980 |
|
SU1023160A1 |
| Роликовый стенд для сборки под сварку обечаек цилиндрического корпуса друг с другом и обечайки цилиндрического корпуса с днищем | 2015 |
|
RU2609600C1 |
,
ГЛ
.
фиг.2.
/
Фиг.З
б-б
ФиьЛ
Редактор Е.Папп
Составитель В.Клоков Техред И.Попович :
1650/14
Тираж 1001Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная, 4
Корректор А.Обручар
| Вращатель цилиндрических изделий при сварке | 1981 |
|
SU996155A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
