Изобретение относится к подъемно-транспортному машиностроению, в частности к ловителям платформы подъемника для длинно- меров.
Цель изобретения - улучшение эксплуатационных характеристик ловителя путем обеспечения неодновременного срабатывания захватных устройств.
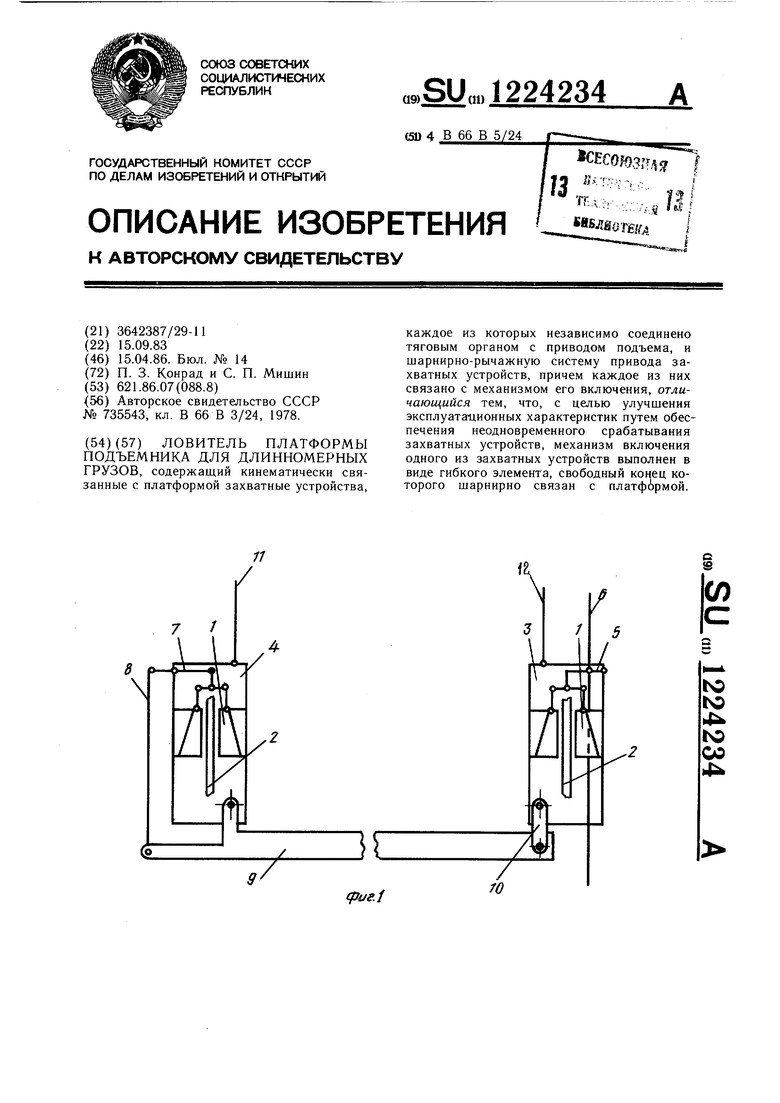
На фиг. 1 изображен ловитель, при нормальной работе подъемника, обш,ий вид; на фиг. 2 - положение, ловителя при ослаблении или обрыве тягового каната одной из тележек подъемника; на фиг. 3 - то же, другой тележки.
Ловитель подъемника для длинномеров содержит захватные устройства 1, охваты- ваюш.ие с зазором неподвижные направ- ляюш,ие 2, установленные в клиновых пазах тележек 3 и 4. Устройство 1 тележки 3 связано через шарнирно-рычажную систему 5.с тросом 6 механизма включения ловителя, представляющего собой ограничитель скорости (не показан),а устройство 1 тележки 4 посредством шарнирно-рычажной системы 7 и гибкой связи 8 шарнирно связано с грузовой платформой 9 подъемника. Грузовая платформа 9 также шарнирно связана с тележкой 4, а с помош.ью серьги 10 - с тележкой 3.
Тележки 3 и 4 независимо связаны с приводом подъема (не показан) тяговыми канатами 11 и 12.
Устройство работает следующим образом.
При нормальной работе подъемника, т.е. без обрыва тяговых канатов 11 и (или 12) или без случайного их ослабления, грузовая платформа 9 занимает горизонтальное положение и между заклинивающими звеньями 1 и направляющими 2 существует зазор.
0
Если, например, тележка 4 опускается с заданной скоростью, а тележка 3 вследствие обрыва тягового органа 12 или случайного его ослабления опускается с аварийной скоростью, срабатывает ограничитель скорости и трос 6 через шарнирно-рычажную систему 5 заставляет захватное усройство 1 тележки 3 войти во взаимодействие с направляющими 2, выбрать зазор и заклинить тележку 3.
Связанный с шарнирно-рычажной системой 5 датчик (не показан) дает команду на отключение привода подъема (не показан). Тележка 4 тоже останавливается, грузовая платформа 9 принимает наклонное положение к горизонту а гибкая связь 8 находится при этом в состоянии свободного провисания.
Если тележка 3 опускается с заданной скоростью, а тележка 4 с аварийной, опережая в своем движении тележку 3, грузовая платформа 9 наклоняется в сторону тележки 4, натягивая гибкую связь 8, которая через шарнирно-рычажную систему 7 приводит в действие захватные устройства 1 тележки 4, заклинивая последнюю на направляющей 2. Шарнирно-рычажная система 7 приводит в действие датчик, отключающий привод подъема.
Если тележки 3 и 4 одновременно движутся вниз с аварийными скоростями, то первым срабатывает устройство 1 тележки 3 от ограничителя скорости, фиксируя тележку 3 и отключая привод подъема. Тележка 4 продолжает опускаться. В этом положении с помощью натянутой гибкой связи 8 срабатывают захватные элементы 1 тележки 4, фиксируя ее на направляющей 2.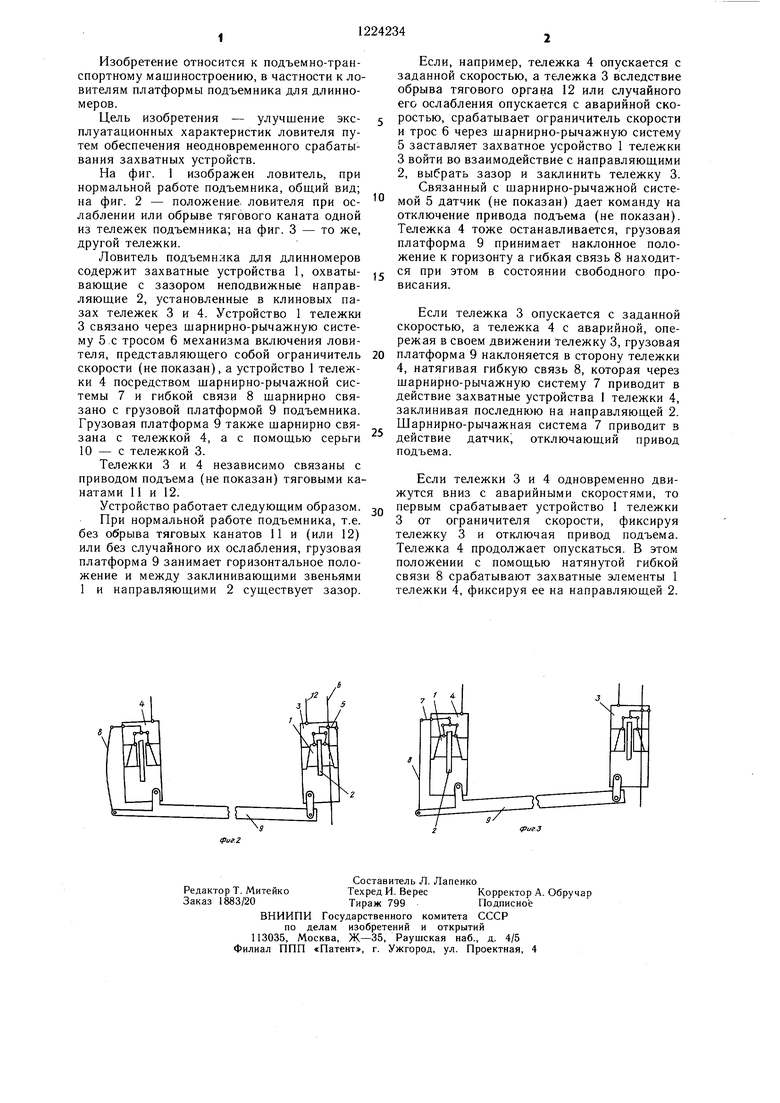
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема и спуска автосамосвалов из карьеров | 1987 |
|
SU1437337A1 |
| Подъемник транспортных средств с горной массой из карьеров | 1988 |
|
SU1519991A1 |
| ПОДЪЕМНИК АВТОМОБИЛЕЙ | 2000 |
|
RU2169692C1 |
| ЛОВИТЕЛЬ ДЛЯ ГРУЗОВОГО ПОДЪЕМНИКА | 2013 |
|
RU2526315C1 |
| ГРУЗОВОЙ ПОДЪЕМНИК | 2014 |
|
RU2563926C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ЛОВИТЕЛЕЙ КАБИНЫ ЛИФТА | 2006 |
|
RU2398727C2 |
| ШАХТНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2585132C2 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| ПОДЪЕМНИК ДЛЯ ПЕРЕМЕЩЕНИЯ ВНУТРИ ВЕРТИКАЛЬНО УСТАНОВЛЕННОГО ОБЪЕКТА | 1992 |
|
RU2026252C1 |
| Ловитель для грузоподъемных механизмов | 1986 |
|
SU1337333A1 |
/ 4.
риг.З
Составитель Л. Лапенко
Редактор Т. МитейкоТехред И. ВересКорректор А. Обручар
Заказ 1883/20Тираж 799Подписиое
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Ловитель подъемника | 1978 |
|
SU735543A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
