I
Изобретение относится к гидроавтО матике и может быть использовано, например, в электрогидравлических следящих приводах станков и автоматов.
Известна электрогидравлическая система, содержащая задатчик, измеритель рассогласования, основной и корректирующий каналы, имещие каждый электромеханический преобразователь для управления регулятором подачи источника питания, подключенного к гидродвигателю, и датчик положения выходного элемента гидродвигателя, соединенный с измерителем рассогласования 1.
Недостатками известного привода являются малая точность и сложность конструкции вследствие выполнения источника питания в виде двух регулируемых насосов.
Цель изобретения - повышение точности и упрощение конструкции.
Указанная цель достигается тем, что источник питания выполнен в виде реверсивного насоса-дозатора, а измеритель рассогласования - в виде зубчатой передачи и магнитной муфты сцепления, один из полюсов которой жестко соединен с регулятором подачи насоса и с электромеханическим преобразователем основного канала, а другой полюс через зубчатую передачу - с электромеханическим преобразователем корректирующего канала.
При этом насос-дозатор выполнен поршневым с приводом от эксцентрика и со свободно плавающим поршнем, установленным между неподвижным упо- j ром и регулятором подачи, причем последний выполнен в виде подвижного упора.
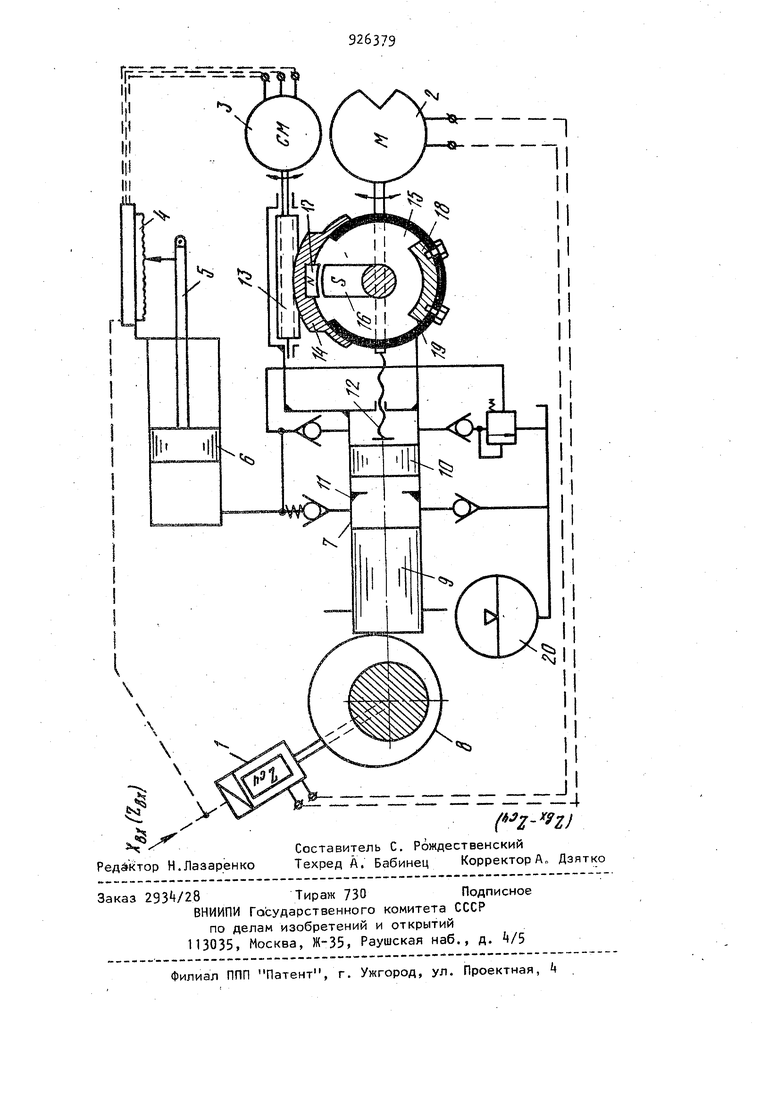
На чертеже изображена схема электрогидравлической следящей системы.
Система содержит задатчик (не изображен), последовательно соединенный со счетчиком 1 числа рабочих цй1клов, основной канал, выполненный э виде электрически связанного со сметчиком 1 электромеханического преобразователя (сервомотора) 2, кор ректирующий канал, выполненный в виде электромеханического преобразователя (сервомотора) 3, электрически связанного с датчиком 4 положения выходного элемента (штока) 5 гидродвигателя (гидроцилиндра) 6, причем датчик электрически связан с задатчи ком. Источник питания подключен к Гидродвигателю 6 и выполнен- в виде реверсивного поршневого насоса-дозатора 7 с приводом от эксцентрика 8 через приводной поршень 9 и со своводно плавающим поршнем 10, установленным между неподвижным упором 11 и регулятором подачи, выполненным в виде подвижного упора 12. Датчик Ц соединен корректирующим каналом с измерителем рассогласования, который выполнен в виде зубчатой (червячной) передачи, включающей червяк 13 и червячный сектор 14, и магнитной муфты 15 сцепления, имеющей подвижные полюса 16 и 17, первый из которых жестко соединен с подвижным упором 12 и с сервомотором 2, а второй через сектор k и червяк 13 с сервомотором 3. Для ограничения по ворота полюса 16 магнитная муфта снабжена ограничителями 18 и 19. Раб чая жидкость поступает к насосу 7 от аккумулятора 20. „ Электрогидравлическая следящая система работает следующим образом. При изменении задатчиком входного сигнала значение, например, в дискретном коде Zg сравнивается с числом рабочих циклов ЕСЧ, совершенных ранее. Счетчик 1 отсчитывает рабочие циклы насоса 7 на увеличение при контакте полюса 16 с ограничителем 18, обеспечиваемом сервомотором 2,или на уменьшение при контакте полюса 16 с ограничителем 19. в процессе отработки дискретного сигнала сервомеханизмом 3 сдви гаются сектор 14 и полюс 17 в крайнее положение. При гашении на счетчике 1 дискрет ного сигнала , т.е. после отра ботки насосом 7 заданного числа рабо чих циклов в режиме фиксированного максимального значения подачи рабочей жидкости, сервомотор 2 выводит упор 12, и одновременно полюса 16 17 и червяк 13, в положение, соответствующее нулевому значению подачи насоса 7. За счет погрешностей дозирования и пересчета Xj, в Z действительное положение штока 5 отличается от теоретического, заданного величиной Xj ( , и , датчик формирует сигнал коррекции, управляющий сервомеханизмом 3, что приводит к смещению сектора И, полюсов 16 и 17 и упора 12 в направлении, зависящем от знака сигнала коррекции, и в гидроцилиндр 6, например, подается жидкость (с относительно небольшой подачей), пока не будет достигнута точная установка штока 5 в Заданное задатчиком положение. Таким образом, дискретный сигнал управления отрабатывается по разомкнутой схеме управления, при максимальной подаче насоса 7, что обеспечивает высокое быстродействие при высокой устойчивости работы. Оставшееся после отработки () рабочих циклов (шагов штока 5) рассогласование в перемещении (обычно 0, от требуемого перемещени штока) компенсируется в режиме слежения благодаря наличию корректирующего канала. При этом ввиду малости рассогласования и меньшей скорости движения в режиме, слежения устойчивость системы не нарушается. Выполнение измерителя рассогласования в виде зубчатой передачи и магнитной муфты сцепления позволяет выполнить источник питания в виде реверсивного насоса-дозатора, что повышает точность и упрощает конструкцию системы. Применение изобретения в электрогидравлических следящих приводах позволит повысить их точность и упростить конструкцию. Формула изобретения 1. Электрогидравлическая следящая система, содержащая задатчик, измеритель рассогласования, основной и корректирующий каналы, имеющие каждый электромеханический преобразователь для управления регулятором подачи источника питания, подключенного к гидродвигателю, и датчик положения выходного элемента гидродвигателя,соединенный с измерителем рассогласования, отли чающаяся тем, что, с целью повышения точности и упрощения кoнctpyкции, источник, пит ния выполнен в виде реверсивного насоса-дозатора, а измеритель рассогласования - в виде зубчатой пере дачи и магнитной муфты сцепления, один из полюсов которой жестко соединен с регулятором подачи насоса и с электромеханическим преобразователем основного канала, а другой полюс через зубчатую передачу - с электромеханическим преобразователе корректирующего канала. 96 2. Система по п.1, отличаю щ а я с я тем, что насос-дозатор выполнен поршневым с приводом от эксцентрика и со свободно плавающим поршнем, установленным между неподвижным упором и регулятором подачи, причем последний выполнен в виде подвижного упора. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 332256, кл. F 15 В 9/03, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029890C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029891C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ГИДРОАГРЕГАТА | 1993 |
|
RU2091608C1 |
| Способ резервирования электрогидравлической системы регулирования частоты вращения и устройство для его осуществления | 1983 |
|
SU1174579A1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2021 |
|
RU2769457C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СУДОВОЙ ПАРОТУРБИННОЙУСТАНОВКИ | 1966 |
|
SU185225A1 |
| Электрогидравлическая следящая система | 1986 |
|
SU1363133A1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305211C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |