запоминающее устройство 7, процессор 9 и поятоянное запоминающее устройство (ПЗУ) 10 программы весовой обработки. Шины Ш 1 контроллера 6 соединены с Ш 2 контроллера 11 ро- бастиой обработки, содержащего ПЗУ 12, процессор 13, ПЗУ 14 программы робастной обработки, интерфейс 16 качества, подключенные соответственИзобретение относится к весоизмерительной технике.
Цель изобретения - повьшение точности за счет ослабления действия нестационарных помех.
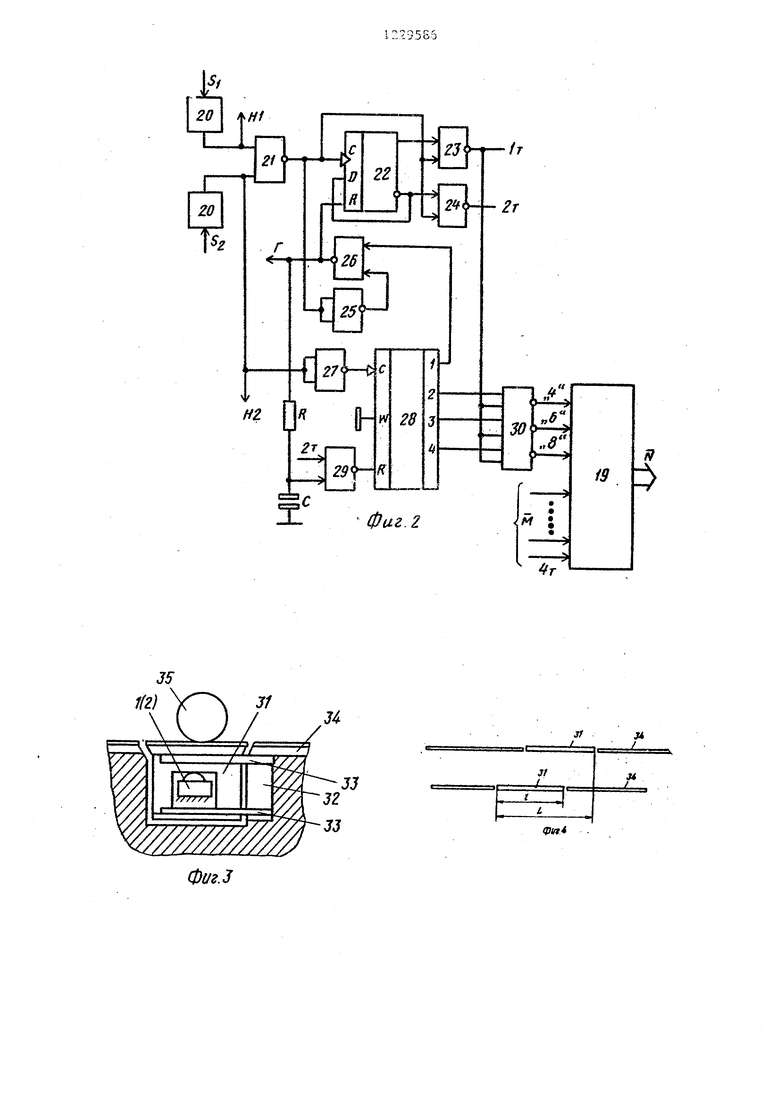
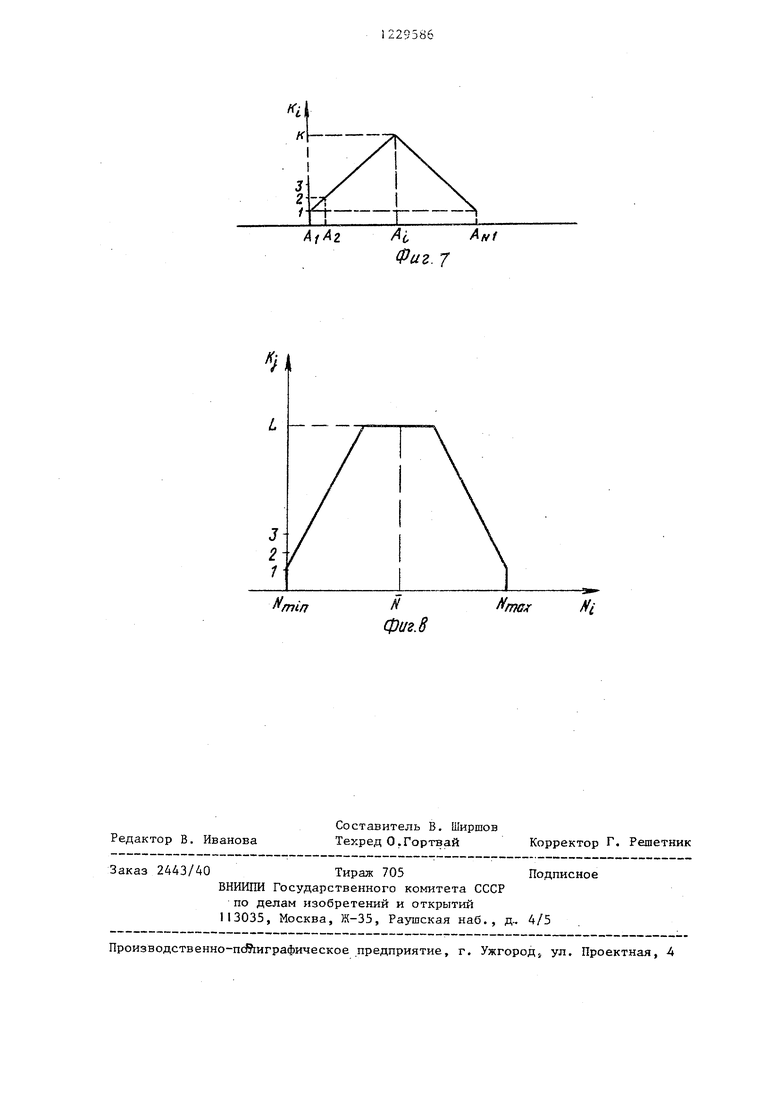
На фиг. I изображена блок-схема устройства для поосного взвешивания железнодорожного состава в движении на фиг. 2 -- принципиал:ьная схема блока идентификации; на фиг. 3 и 4 - конструкция и расположение грузопри- емных блоков; на фиг. 5 и 6 - временные диаграммы для пояснения работы системы; на фиг. 7 и 8 - варианты применяемых весовых и робастных функций.
Устройство (фиг. 1) содержит весоизмерительные датчики 1 и 2, через фильтры 3 подсоедипенные к блоку 4 идентификации и к блоку 5 аналого- цифрового преобразования, выход1з1 которого связаны с шинами Ш 1 контроллера 6 весовой обработки, содержащего оперативное заноминающее устройство 7 (далее ОЗУ 7) весоизмерительного датчика 1 и ОЗУ 8 весоизмерительного датчика 2, процессор 9 и постоянное запоминающее устройство 10 (далее ПЗУ 10) програм 1ы весовой обработки. Шины Ш 1 контроллера 6 соединены с шинами Ш 2 дополнительного контроллера 1I робастной обработки, содерлсащего ОЗУ 12, процессор 13, ПЗУ 14 программь робастной обработки, интерфейс 15 регистрации и интерфейс 16 качества, подключенные соответственно к регистрирующему устройству 17 и сигнализатору 18 качества, представляющему собой , например, светофор с фонарями разного цвета.
но к регистрирующему устройству 17 и сиг нализатору 18 качества представляющему собой, например, светофор „ Введ€шие новых элементов и образование новых связей между элемента- ми устройства позволяют достичь пос- .тавленн-;/1о цель изобретения. Приведена принципиальная схема блока 4 идентификации., 1 з.п. ф-лы, В ил.
,
Выходы блока 4 идентификации и шины Ш 1 контроллера 6 весовой обработки соединены с входами блока 19 оценки, выход которого соединен с шинами Ш 2 контроллера 11 робастной обработки.
4 идентификации содержит (фиг. 2) сигнализатор нуля, обра- зованмьй компараторами 20 входных
сигналов S
(
весоизмерительных
датчиков и 2 и схемой 1-ШИ 21 , счет- libtti триггер 22, ключи 23 и 24 соответственно первой и второй телелсек вагона, инвертор 25 и ключ 26 гашекия. Компараторы 20 формируют сигналы нагр лжения I 1 и Н 2 соответственно д 1тчиков 1 и 2, ключи 23 и 24 идентифицируют проход по весам соот- Ветственно первой тележки (1т) и
второй теле):ски(2Т) вагона, а ключ 26 формирует сигнал гашения (Г) в случае г рохода локомотива или другого объекта..
Выходной сигнал одного из компараторов 20 через инвертор 27 поступает us. счетный вход счетчика 28 наезжающих осей, вход гашения R которого через схему 29 совпадения связан с
выходом 2т ключа 24 и через резистив- но-емкостную цепочку ЕС - с выходом ключа 26 гашения. Выходы счетчика 28 2 3 и 4 через ключевую схему 30 связаны с адресными входами блока 19 оценки, представляющего собой, например, устройство памяти с произвольной выборкой. Другие адресные шины блока 19 образованы кодом числа М, т.е. ориентировочной массы вагона, определяемой контролпером 6 весовой обработки после прохода по jвесам первой тележки вагона или нес
колько ранее. Контроллер 6 формирует также команду 4т (Чтение).
Такое построение блока 19 оценки позволяет разгрузить контроллер 6 от громоздких расчетов ожидаемого периода собственных колебаний
Т 21)
рг
1ЕЖ1
- суммарная жесткость подвес-JQ ;ки или, что тоже самое, ожидаемого .числа N дискретизаций на участках от экстремума до экстремума по формуле
Т N -1-.
. 5
ем значительно убыстряется и облегчается программно дальнейшая обработка сигналов S и S, поскольку выборка результата из памяти осущест вляется очень быстро.
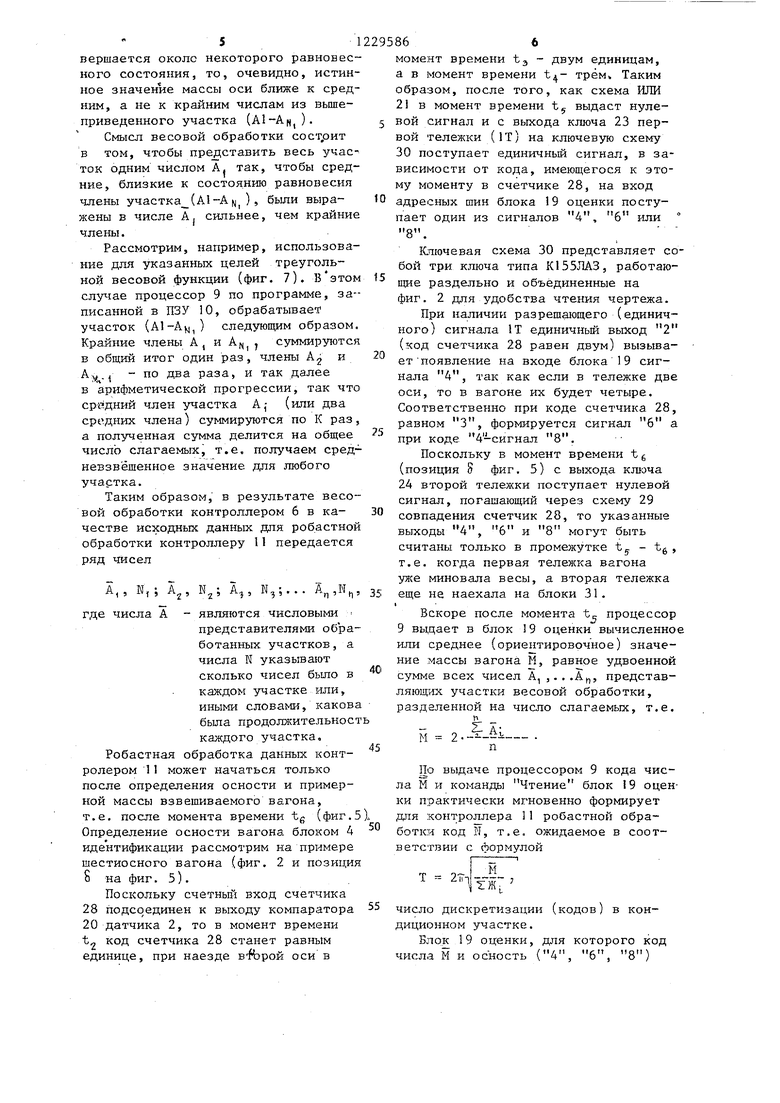
На фиг. 3 показана конструкция грузопрнемного блока 31, опираклцего- ся на весоизмерительный датчик 1 (или 2) и соединенного с фундаментным блоком 32 струнками-фиксаторами 33. Грузоприемный блок 31 встроен в железно цорожный путь 34, по которому прокатываются колеса 35 взвешиваемых объектов (вагоной).
Расположение грузонрнемных блоков 31 на железнодорожном пути 34 в плане показано на фиг. 4. Дпина 1 блока 31 выбирается меньшей наименьшего межосевого расстояния в составе так, чтобы в любой момент време- ни на блоке 31 не бьшо более одного колеса 35.
Варьируя разнесением блоков 31, т.е. выбирая величину L, можно по чередованиям наездов и выездов осей идентифицировать любой из взвешиваемых объектов, что делает схему расположения блоков 31 по фиг. 4 универсальной.
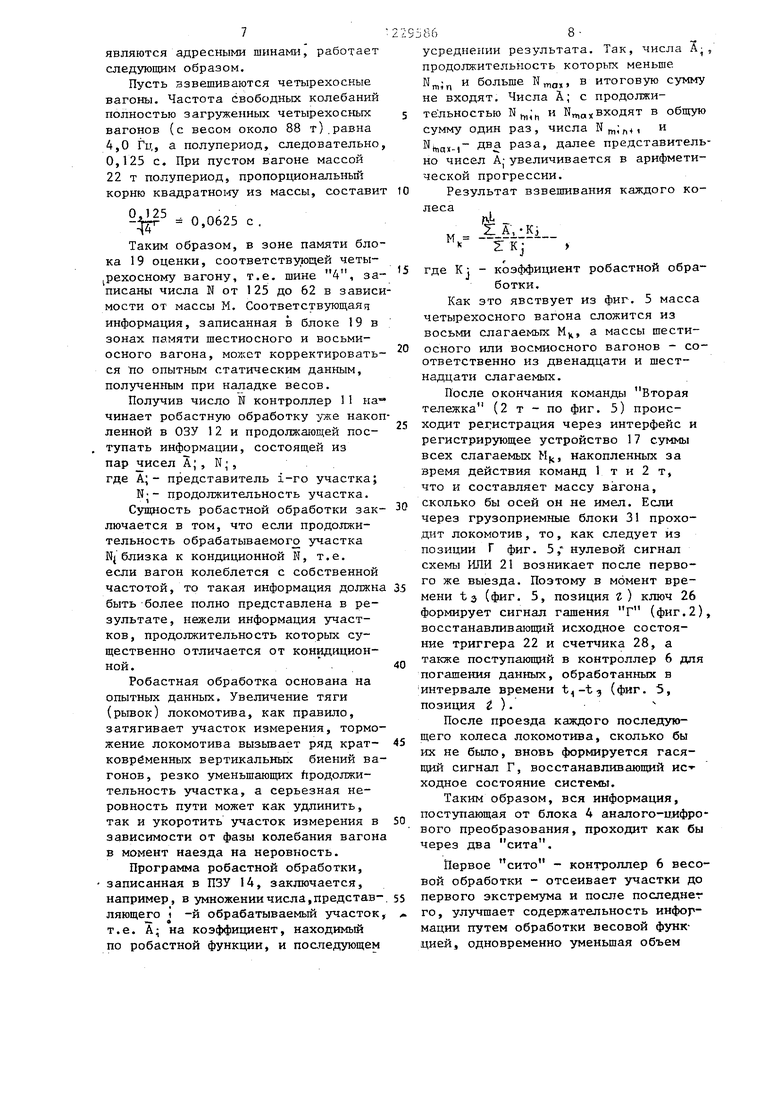
На фиг. 5 показаны чередования наездов и выездов осей для четырехосного вагона (позиции q ), шестиос- ного вагона (позиции S ), первой тележки восьмиосного вагона (позиции ) и первой тележки локомотива (по- зиция 1 ) при условии, что длина 1 выбрана около 1300 мм, а мм, что больше межосевого расстояния (1800 мм) всех вагонов вьш1еназванных типов, но меньше межосевого расстол- ния - 21PO мм - локомотивов.
Система для динамического взвешивания работает следующим образом.
5
Q
S
0
5
5
При наезде колеса 35 объекта на Грузоприемный блок 31 в момент времени t, ( позиция 1а фиг. 5) нагружается, например, весоизмерительный датчик 1, формируется сигнал наезда первого экстремума 31, обозначая границы участков между экстремумами Э1 , Э2, ЭЗ,.. . Эц.
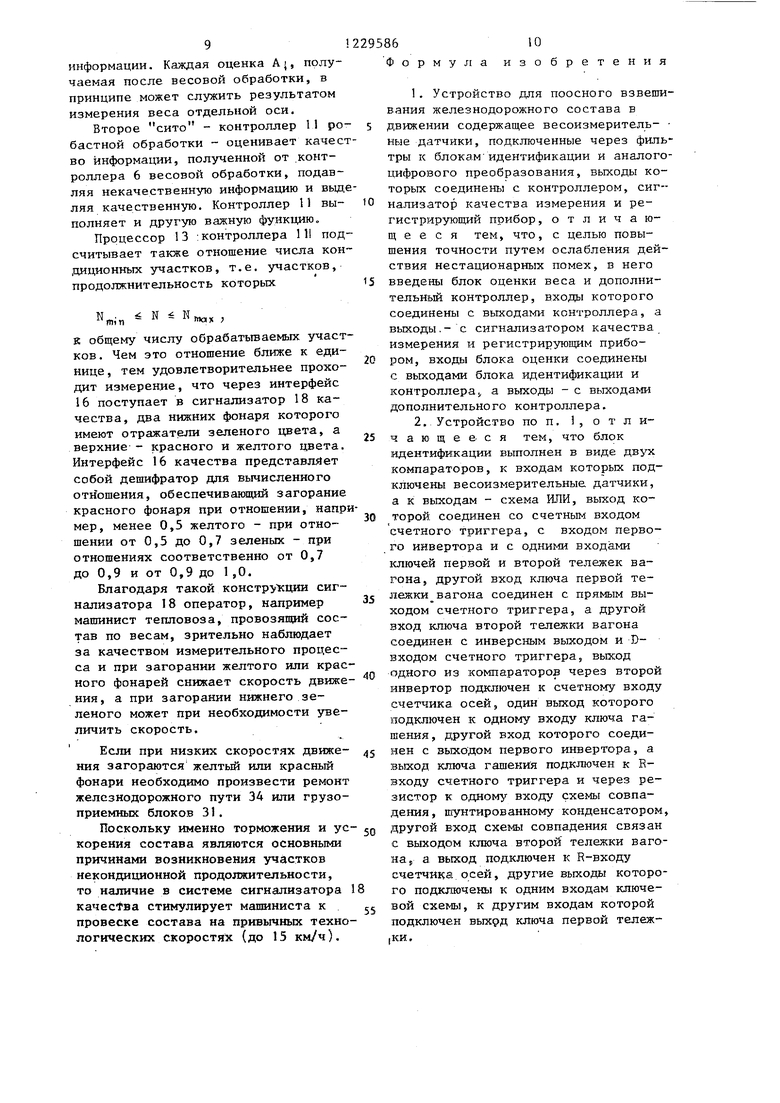
Аналогично коды, принадлежащие датчику 2 и представленные на позит ции & фиг. 6 в интервале времени t, сравниваются и записьтаются, начиная с первого экстремума 33N, в ОЗУВ также с разделением гра- ниц участков.
Возможные ложные экстремумы, изображенные в зоне 35 на позиции а или Б зоне на позиции 8 фиг. 6 могут быть устранены, например, по правилу
min «i А, max А,
где А - средняя оценка сигнала датчика 1 (или 2) на наблюдаемых участках, подсчитываемая процессором 9 параллельно с записью кодов в ОЗУ и ОЗУ8.
Одним из возможных решений в случае ложных экстремумов может быть удлинение участка обработки, например, с Э4 до Э6 или с Эр. до Э (фиг. 6).
Участки Э4-Э6 или Э.,-Эр,могут. быть также разделены на два каждый с границей - первый по ложному минимуму, а второй - по ложному максимуму, при условии примерной равнозначности дискр етизации больших и меньших оценки А (фиг. 6).
При заполнении ОЗУ7 и ОЗУ8 множеством кодов между соседними экстремумами процессор 9 подсчитывает кроме того количество кодов в каждом участке ЭЗ-Э2, Э2-ЭЗ, ЭЗ-Э4 и т.д., что необходимо для последующей весо- . вой и робастной обработки. Весовая обработка, производимая контролле- ром 6, может начинаться после определения границ участков и выполняется следующим образом.
Пусть имеем участок от экстремума Э1 до экстремума Э2 (позиция фиг. -6) продолжительностью в N, чисел, т.е.
А1 , А2, АЗ...А .
Поскольку колебание от Э до Э2 выходного воздействия датчика I со
вершается около некоторого равновесного состояния, то, очевидно, истинное значение массы оси ближе к средним, а не к крайним числам из вьше- приведенного участка (AI-AN).
Смысл весовой обработки сострит в том, чтобы пре,ставить весь участок одним числом А. так, чтобы средние, близкие к состоянию равновесия члены участка(А1-Ам,) были выражены в числе AJ сильнее, чем крайние члены.
Рассмотрим, например, использование для указанных целей треугольной весовой функции (фиг. 7). В этом случае процессор 9 по программе, записанной в ПЗУ 10, обрабатывает участок (AI-AM,) следующим образом. Крайние члены А, и Af, , суммируются в общий итог один раз, члены А и А:у. - по два раза, и так далее в арифметической прогрессии, так что ср-ндний член участка А; (или два средних члена) суммируются по К раз, а полученная сумма делится на общее число слагаемых, т.е. получаем средневзвешенное значение дпя любого участка.
Таким образом, в результате весовой обработки контроллером 6 в качестве исходных данных дпя робастной обработки контроллеру 11 передается ряд чисел
А
1
N,; А, N,; А,
N,
2 и,... А,И
где числа А - являются числовыми представителями обработанных участков, а числа К указывают сколько чисел было в каждом участке или, иными словами, какова была продолжительност каждого участка,
Робастная обработка данных контролером 11 может начаться только после определения осности и примерной массы взвешиваемого вагона, т.е. после момента временр tg (фиг.5 Определение осности вагона блоком А идентификации рассмотрим на примере шестиосного вагона (фиг. 2 и позиция S на фиг. 5).
Поскольку счетный вход счетчика 28 подсоединен к выходу компаратора 20 датчика 2, то в момент времени t код счетчика 28 станет равным единице, при наезде в-йэрой оси в
10
15
0
5
5
момент времени tj - двум единицам, а в момент времени трем. Таким образом, после того, как схема ИЛИ 21 в момент времени t выдаст нуле- 5 вой сигнал и с выхода ключа 23 первой тележки (IT) на ключевую схему 30 поступает единичньш сигнал, в зависимости от кода, имеющегося к этому моменту в счетчике 28, на вход адресных шин блока 19 оценки поступает один из сигналов 4, 6 или
Поп.
Юпючевая схема 30 представляет собой три ключа типа К155ЛАЗ, работающие раздельно и объединенные на фиг. 2 для удобства чтения чертежа.
При наличии разрещающего (единичного) сигнала Т единичный выход 2 (код счетчика 28 равен двум) вызывает появление на входе блока 19 сигнала 4, так как если в тележке две оси, то в вагоне их будет четыре. Соответственно при коде счетчика 28, равном 3, формируется сигнал 6 а при коде 4-сигнал 8.
Поскольку в момент времени t g (позиция S фиг. 5) с выхода ключа 24 второй тележки поступает нулевой сигнал, погашающий через схему 29 совпадения счетчик 28, то указанные выходы 4, 6 и 8 могут быть считаны только в промежутке tg. - tg , т.е. когда первая тележка вагона уже миновала весы, а вторая тележка еще не наехала на блоки 31.
I
Вскоре после момента t
0
5
0
процессор 9 вьщает в блок I9 оценки вычисленное или среднее (ориентировочное) значение массы вагона М, равное удвоенной сумме всех чисел А, ,...А,, представ- ЛЯЮЩ.ИХ участки весовой обработки, разделенной на число слагаемых, т.е.
й 2.-5-А1 „. п
По выдаче процессором 9 кода числа М и команды Чтение блок 19 оценки практически мгновенно формирует для контроллера 11 робастной обработки код N, т.е. ожидаемое в соответствии с формулой
число дискретизации (кодов) в кондиционном участке.
Блок 19 оценки, для которого код числа М и осность (4, 6, 8)
являются адресными шинами, работает следующим образом.
Пусть завешиваются четырехосные вагоны. Частота свободных колебаний полностью загруженных четырехосных: вагонов (с весом около 88 т) равна 4,0 Гц, а полупериод, следовательно 0,125 с. При пустом вагоне массой 22 т полупериод, пропорциональньп корню квадратно1-1у из массы, составит
- 0,0625 с .
Таким образом, в зоне памяти блока 19 оценки, соответствующей четы- pexocнoмy вагону, т.е. шине 4, записаны числа N от 125 до 62 в зависимости от массы М. Соответствующаяя информация, записанная в блоке 19 в зонах памяти шестиосного и восьми- осного вагона, может корректироваться по опытным статическим данным, полученным при наладке весов.
Получив число N контроллер 11 на чинает робастную обработку уже накопленной в ОЗУ 12 и продолжающей поступать информации, состоящей из пар чисел А; , N, ,
где А;- представитель i-ro участка; N-- продолжительность участка.
Сущность робастной обработки заключается в том, что если продолжительность обрабатываемого участка N близка к кондиционной N, т.е. если вагон колеблется с собственной частотой, то такая информация должна быть более полно представлена в результате, нежели информация участков, продолжительность которых существенно отличается от конидицион- ной.
Робастная обработка основана на опытных данных. Увеличение тяги (рывок) локомотива, как правило, затягивает участок измерения, торможение локомотива вызывает ряд кратковременных вертикальных биений вагонов, резко уменьшающих продолжительность участка, а серьезная неровность пути может как удлинить, так и укоротить участок измерения в зависимости от фазы колебания вагона в момент наезда на неровность.
Программа робастной обработки, записанная в ПЗУ 14, заключается, например, в умножении числа, представляющего 1 -и обрабатываемый участок, т.е. А- на коэффициент, находимый по робастной функции, и последующем
2S5868усреднении результата. Так, числа А- , продолжительность которых меньше и больше . в итоговую сумму не входят. Числа А; с продолжи- 5 тельностью и НщахВходят в общую сумму один раз, числа Nm;n+t hiax-i Д раза, далее представительно чисел А; увеличивается в арифметической прогрессии.
0 Результат взвешивания каждого колеса
м SlA ,-КЗ
М г - - - - -.- .- -. - -
ZKj
5 где К; - коэффициент робастной обработки.
Как это явствует из фиг. 5 масса четырехосного вагона сложится из восьми слагаемых Мц, а массы шести0 осного или восмиосного вагонов - соответственно из двенадцати и шестнадцати слагаемых.
После окончания команды Вторая тележка (2 т - по фиг. 5) проис5 ходит регистрация через интерфейс и регистрирующее устройство 17 суммы всех слагаемых Мц, накопленных за время действия команд 1 т и 2 т, что и составляет массу вагона,
0 сколько бы осей он не имел. Если через грузоприемные блоки 31 проходит локомотив, то, как следует из позиции Г фиг. 5, нулевой сигнал схемы 1ШИ 21 возникает после перво- го же выезда. Поэтому в момент времени 1з (фиг. 5, позиция г ключ 26 формирует сигнал гашения Г (фиг.2), восстанавливающий исходное состояние триггера 22 и счетчика 28, а
Q также поступаюпсий в контроллер 6 для погашения данных, обработанных в интервале времени (фиг. 5, позиция t }
После проезда каждого последую, щего колеса локомотива, сколько бы их не было, вновь формируется гасящий сигнал Г, восстанавливаюш 1Й ис- ходное состояние системы.
Таким образом, вся информация, поступающая от блока 4 аналого-ияфро
вого преобразования, проходит как бы
через два сита.
Первое сито - контроллер 6 весовой обработки - отсеивает участки до первого экстремума и после последнег го, улучшает содержательность информации путем обработки весовой функцией, одновременно уменьшая объем
информации. Каждая оценка А;, получаемая после весовой обработки, в принципе может служить результатом измерения веса отдельной оси.
Второе сито - контроллер 11 ро- бастной обработки - оценивает качество информации, полученной от контроллера 6 весовой обработки, подавляя некачественную информацию и вьще ляя качественную. Контроллер П вы- полняет и другую важную функцию„
Процессор 13 ; контроллера 1II подсчитывает также отношение числа кондиционных участков, т.е. участков, продолжнительность которых
N.
N i N,
mm ----- max ; К общему числу обрабатьгааемых участков. Чем это отношение ближе к единице , тем удовлетворительнее проходит измерение, что через интерфейс 16 поступает в сигнализатор 18 качества, два нижних фонаря которого имеют отражатели зе пеного цвета, а верхние - красного и желтого цвета. Интерфейс 16 качества представляет собой дешифратор для вычисленного отношения, обеспечиванлций загорание красного фонаря при отношении, напрмер, менее 0,5 желтого - при отношении от 0,5 до 0,7 зеленых - при отношениях соответственно от 0,7 до 0,9 и от 0,9 до 1 ,0.
Благодаря такой конструткиин сигнализатора 18 оператор, например машинист тепловоза, провозящий состав по весам, зрительно наблюдает за качеством измерительного процесса и при загорании желтого или красного фонарей снижает скорость движения, а при загорании нижнего зеленого может при необходимости увеличить скорость.
Если при низких скоростях движения загораются желтый или красный фонари необходимо произвести ремонт железнодорожного пути 34 или грузо- приемных блоков 31.
Поскольку именно торможения и ус- JQ другой Е:ХОД схемы совпадения связан
корения состава являются основными причинами возникновения участков некондиционной продолжительности, то наличие в системе сигнализатора качества стимулирует машиниста к провеске состава на привычных технологических скоростях (до 15 км/ч).
1229586
Форм у л а
10 изобретения
s
5
0
5
0
5
0
5
1.Устройство для поосного взвешивания железнодорожного состава в движении содержащее весоизмеритель- ные датчики, подключенные через фильтры к блокам идентификации и аналого- цифрового преобразования, выходы которых соединены с контроллером, сигнализатор качества измерения и регистрирующий прибор, о т л и ч а ющ е е с я тем, что, с целью повышения точности путем ослабления действия нестационарных помех, в него введе:ЕВ 1 блок оценки веса и дополни- тельньй контроллер, входы которого соединены с выходами контроллера, а выходы,- с сигнализатором качества измерения и регистрирующим прибором, входы блока оценки соединены с выходами блока идентификации и контроллера J, а выходы - с выходами дополнительного контроллера,
2,Устройство по п. i, отличающееся тем, что блок идентификации выполнен в виде двух компараторов, к входам которых подключены весоизмерительные датчики,
а к выходам - схема ИЛИ, выход которой соединен со счетным входом счетного триггера, с входом перво- го инвертора и с одними входами ключей первой и второй тележек вагона, другой вход ключа первой тележки вагона соединен с прямым выходом счетного триггера, а другой вход ключа второй тележки вагона соединен: с инверсным выходом и D- входом счетного триггера, выход одного из компараторов через второй инвертор подключен к счетному входу счетчика осей, один выход которого подключен к одному входу ключа гашения , другой вход которого соединен с выходом первого инвертора, а выход ключа гашения подключен к R- входу счетного триггера и через резистор к одному входу схемы совпадения, Егунтированному конденсатором.
с выходом ключа второй тележки вагона а выход подключен к R-входу счетчика осей, другие выходы которо- го подключены к одним входам ключевой схемы, к другим входам которой подключен ВЫХ9Д ключа первой тележ|КИ,
Фиг.З
Телетка 1 Ofb f Ось 2
ОсьЗ Ocb
tb /Г
4в
Ocbf Ось 2
t, Te CfHKa i
Ocbi OcoZ OcbZ
.JU-UT-IT zs
Ось 4 Ось 5 Ось 6
60
1r
Te/itfftfxa / ffcbf 0CbZ ffci,3
t6
2z
ILA IT Tnr T Tjif
Фиг. 5
ffoK z
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Устройство для взвешивания железнодорожных вагонов в движении | 1987 |
|
SU1474475A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |
| Устройство для взвешивания железнодорожного подвижного состава во время движения | 1982 |
|
SU1046621A1 |
| Устройство для взвешивания транспортных объектов в движении | 1984 |
|
SU1236322A1 |

Изобретение относится к весоизмерительной технике. Цель изобретения повьшение точности путем ослабления действия нестационарных . помех. Устройство содержит весоизмерительные датчики 1 и 2, фильтры 3, блок 4 идентификации, блок 5 аналогового преобразования. В устройство введен контроллер 6 весовой обработки, содержащий оперативное ю ГчЭ сл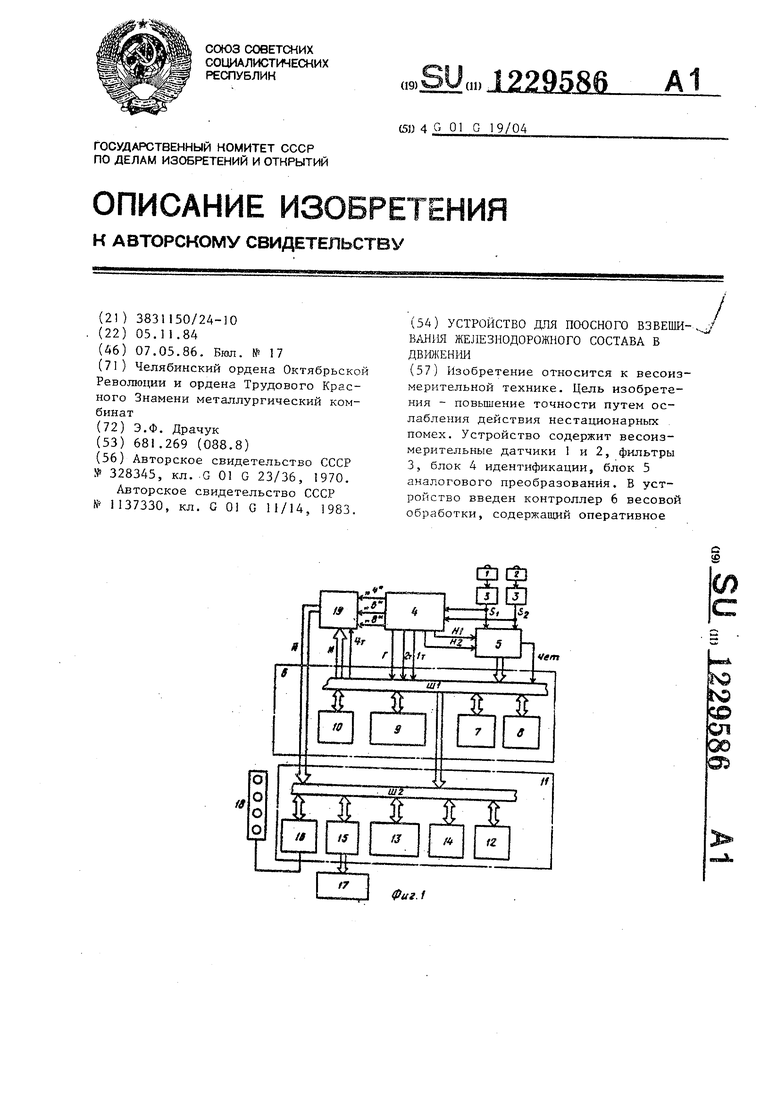
91/
3 ( i
i. XV л
Л
2 3S
a
tz
Фаг.6
t
i AN(
Фиг. r
Ni
Редактор В. Иванова
Составитель В. Ширшов Техред О.Гортвай
Заказ 2443/40Тираж 705Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д 4/5
Производственно-пс играфическое предприятие, г. Ужгородj ул. Проектная, -4
Корректор Г. Решетник
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ВЕСОВ С ЧАСТОТНЫМ ДАТЧИКОМ | 0 |
|
SU328345A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
