Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точности и надежности устройства.
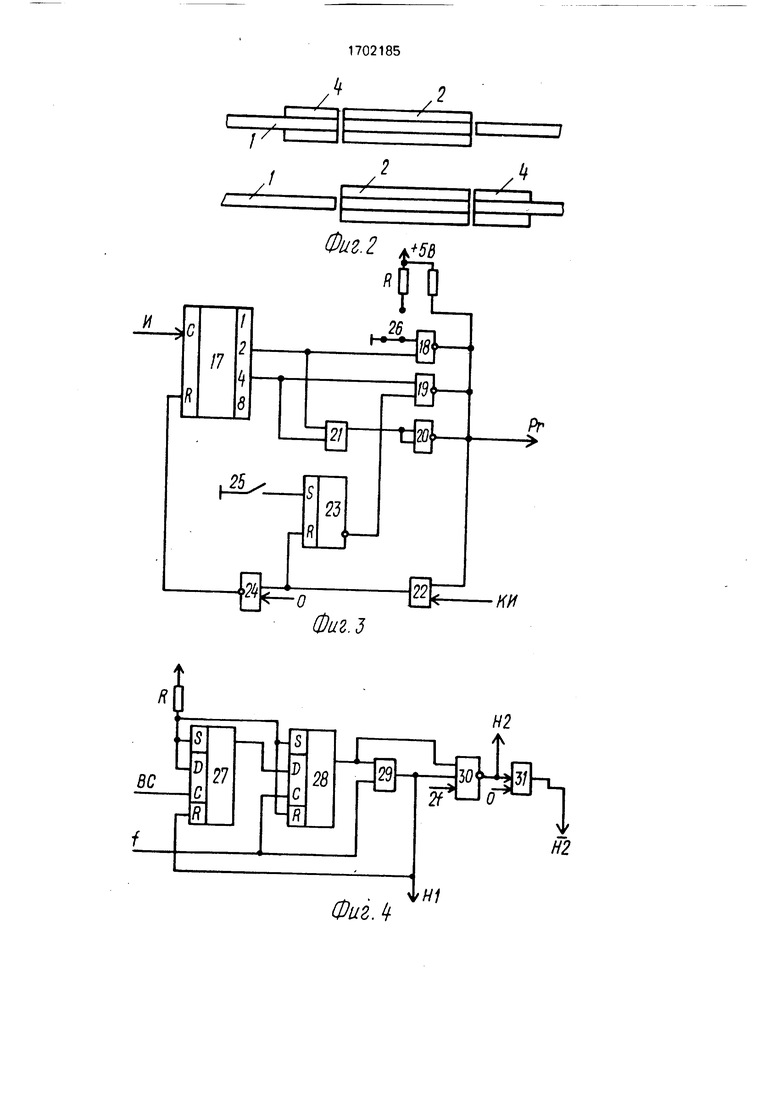
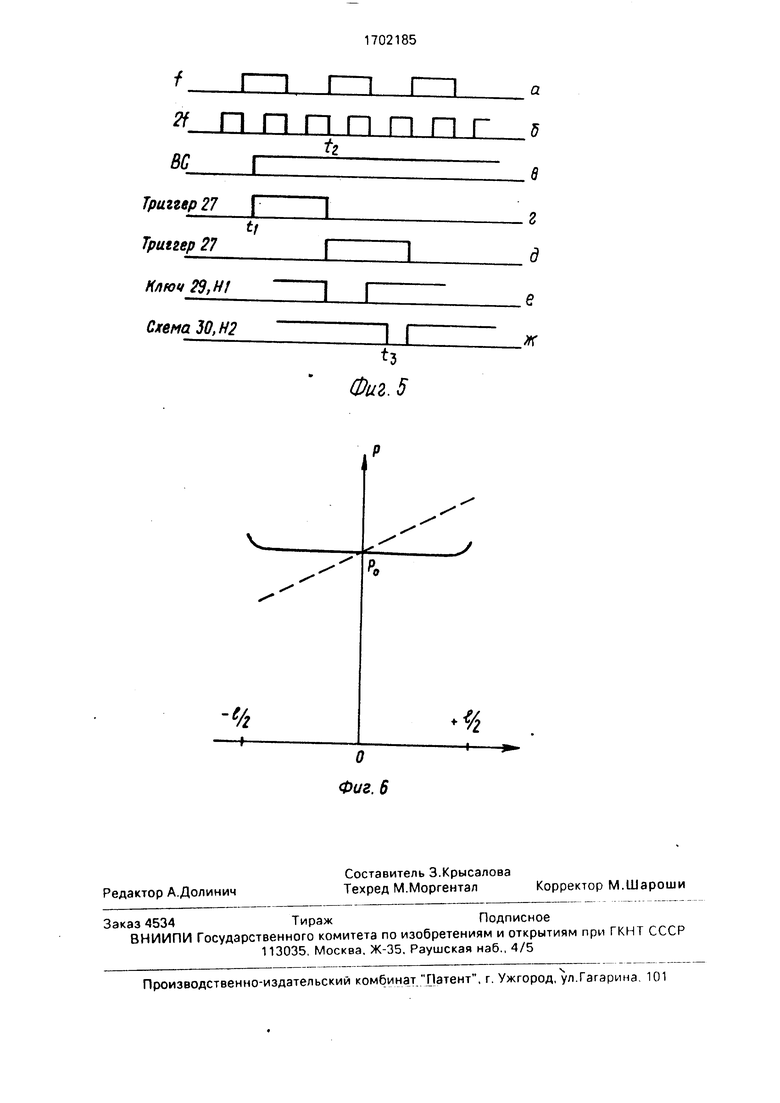
. На фиг. 1 показана схема устройства; на фиг, 2 - расположение грузоприемных и фундаментных блоков; на фиг. 3 - принципиальная схема блока индентификации, входящего в состав данного устройства; на фиг. 4 - схема ключа-распределителя; на фиг. 5 и 6 - диаграммы, поясняющие работу устройства.
Устройство для поосного взвешивания подвижных объектов содержит встроенные в железнодорожный путь 1 два грузоприемных блока 2, которые опираются на тензо- датчики 3, фундаментные блоки 4, струнки
5,посредством которых соединены между собой грузоприемные блоки 2 и фундаментные блоки 4. Фундаментные блоки 4 распо- ложены по разные стороны от грузоприемных блоков 2.
Измерительная часть устройства содержит автокомпенсатор 6, регистрирующий прибор 7, ключ-распределитель 8, счетчик- формирователь 9 задержки, счетчик-измеритель 10 резервного времени, первый триггер 11, первый ключ 12, блок 13 идентификации, схему И 14, второй триггер 15 и второй ключ 16.
Блок 13 идентификации (фиг. 3) состоит из счетчика 17 измерений, схемы И 18, 19, 20, дешифратора 21 числа шесть, ключа 22, триггера 23, инпертора 24, кнопки 25 и перемычки 26.
Ключ-распределитель 8 содержит (фиг. 4) триггеры 27 и 28, ключ 29, схему И 30, схему ИЛИ 31.
В схеме приняты следующие обозначения: ВС - выход (второй) автокомпенсатора 6 Весы свободны РГ и И - входы (второй и третий) Регистрация и Измерение автокомпенсатора 6; Вх - аналоговый вход (первый вход) автокомпенсатора 6; f и 2f - выходы (пятый и первый) автокомпенсатора
6,сигналы на которых имеют соответственно первую частоту f i и вторую 2f; КИ - выход (третий) автокомпенсатора 6 Конец измерений ; Н1, Н2 и Н2 - первый, второй и третий выходы ключа-распределителя 8 соответственно Наезд Г, Наезд 2, Сброс.
Устройство работает следующим образом.
Перед началом работы в устройство подается, например, вручную с помощью кнопки (не показана) установочный сигнал О, по которому автокомпенсатор 6 измеряет и запоминает начальный сигнал тензо- датчиков 3. Кроме того, сигналом О погашается счетчик 17 блока 13 идентификации (фиг. 3), устанавливается триггер 11 задержки, а через схему 31 ИЛИ (фиг. 4) погашается счетчик-измеритель 10 резервного времени,
При наезде в момент времени ti первой
оси первого объекта на выходе ВС автокомпенсатора 6 появляется единичный сигнал, возбуждающий триггер 27 (позиции виг фиг. 5). В момент времени t2 фронтом им0 пульса опорной частоты f возбуждается триггер 28 и на выходе ключа 29 формируется импульс Н1, записывающий в счетчик- формирователь 9 код счетчика-измерителя 10 (для первой оси нулевой).
5Следующим тактом ключа-распределителя 8 будет формирование схемами 30 и 31 в момент времени тз импульса Н2 (Н2), возбуждающего триггер 11, что разрешает работу ключу 12, и погашающего код
0 счетчика-измерителя 10 (в случае первой оси также нулевой).
Поскольку в счетчик-формирователь 9 записан для первой оси объекта нулевой код, то после первого же импульса удвоен5 ной частоты 2f, прошедшего через ключ 12 на выходе счетчика-формирователя 9, появляется импульс Заем (Ј), которым, во-первых, запускается в режим измерения автокомпенсатор 6, во-вторых, по С-входу
0 устанавливается в исходное положение триггер 11, закрывая ключ 12, в-третьих, возбуждая управляющий триггер 15. на время измерения закрывается схема 14 и в счетчик-измеритель 10 прекращается по5 ступление импульсов опорной частоты f,- в-четвертых, импульс засчитывается счетчиком 17 блока 13 идентификации.
По окончании времени измерения автокомпенсатор 6 формирует импульс КИ, по0 ступающий на установочный вход триггера 15. Поскольку на входах схемы 14 в этот момент все сигналы разрешающие (при условии, что скорость движения ниже предельной и взвешиваемая ось еще
5 расходится на блоках 2 и, следовательно, сигнал ВС единичный), то на синхровход сложения (+1) счетчика-измерителя 10 начинают поступать импульсы опорной частоты (f).
Очевидно, что к моменту съезда взвеши0 ваемой оси с блоком 2 код счетчика-измерителя 10 будет пропорционален интервалу резервного времени, т.е. разности времени проезда оси по блокам 2 и выбранного времени измерения автокомпенсатора 6.
5Для того чтобы производить измерения
в центре блоков 2, задержка измерения для второй оси должна составлять половину резервного времени, определенного счетчиком-измерителем 10 при взвешивании первой оси.
При наезде второй оси взвешиваемого объекта на блоки 2 вновь автокомпенсатором 6 формируется высокий потенциал сигнала ВС, ключом-распределителем В формируется импульс Н1. переписывающий код счетчика-измерителя 10 в счетчик- Формирователь 9, который начинает опорожняться импульсами удвоенной частоты 2f (благодаря чему задержка измерения составит ровно половину резервного времени, определенного счетчиком-измерителем 10).
Одновременно счетчик-измеритель 10 заполняется импульсами опорной частоты f до того момента времени, пока на выходе счетчика-формирователя 9 не появится сигнал И (Измерение), который будет засчитан блоком 13 идентификации, установит триггер 11 в исходное положение и возбудит триггер 15, что вызовет остановку подсчета резервного времени. По окончании цикла измерения автокомпенсатор 6 вырабатывает сигнал КИ, триггер 15 устанавливается в исходное состояние и продолжается наполнение счетчика-измерителя 10 импульсами опорной частоты f до съезда взвешиваемой оси с блоков 2 (т.е. до того, как сигнал ВС примет нулевое значение).
При взвешивании третьей и последующих осей все описанные процессы повторяются.
Результаты по взвешенным осям суммируются в автокомпенсаторе 6. Когда число взвешенных осей становится равным уставке блока 13 идентификации, последний формирует сигнал РГ (Регистрация), по которому сумма взвешенных осей фиксируется регистрирующим прибором 7, затем сумматор автокомпенсатора б погашается.
Например, состав из 4-осных вагонов перемещается б-осным локомотивом, который находится в голове состава.
Тогда в начале взвешивания оператор нажимает кнопку 25 (фиг, 3), триггер 23 возбуждается, сигналом со своего инверсного выхода запрещая работу схеме 19.
После взвешивания шести осей локомотива будет сформирован сигнал РГ, а по приходе от автокомпенсатора 6 сигнала КИ счетчик 17 и триггер 23 будут погашены. Все последующие вагоны будут взвешены по алгоритму До четырех уже без вмешательства оператора.
На фиг, б показана зависимость статической ошибки для традиционного расположения грузоприемных блоков 2 (пунктиром) и для расположения блоков 2 по разные стороны от фундаментных блоков в соответствии с фиг. 2 (сплошной линией).
Зависимости ошибки от места приложения истинного усилия РО вразличныхточках грузоприемных блоков 2 получена экспериментально. При известном расположении блоков 2 ошибка (пунктирная линия фиг. 6) составляет на краях блоков 2 с координатами- и соответственно -2,5% и +2,5%,
причем знак - соответствует погрешности
у дальнего от фундаментных блоков 44 конца блоков 2. При предлагаемом расположении блоков 2 по фиг. 2 максимальная ошибка, во-первых, по величине уменьшается в 10-15 раз, во-вторых, имеет существенное значение только на самых краях блоков 2.
При известном расположении блоков 2 при любом фиксированном времени измерений погрешность измерения зависит как
от скорости, так и от направления движения. Наличие метрологического плато, т.е. пологого участка сплошной кривой на фиг.б, существенно превышающего время измерения, позволяет значительно уменьшить реальную ошибку измерений, так как вариации скорости движения состава в процессе измерения хотя и вызывают перемещение-участка измерения по длине блоков 2, но не повышает ошибки измерения.
При превышении объектом установленной скорости на выходе ключа 16 формируется сигнал, по которому регистрирующий прибор печатает условный знак Не считать.
Наоборот, при замедлении скорости движения состава при проезде какой-либо осью блоков 2 предусмотрен аварийный выход О счетчика-измерителя 10, который может быть использован для аварийной сигнализации машинисту локомотива или для остановки счета счетчика-измерителя 10, например, путем подачи сигнала О через инвертор на свободный вход схемы 14 И(на фиг. 1 не показано).
Клеммы 26 предназначены для установки перемычки и соединения одного из входов схемы 18 С потенциалом корпуса или чер§з резистор Р с потенциалом +5В. Подвижные объекты, используемые на предприятиях народного хозяйства, в частности в металлургической промышленности, имеют 2, 4 или 6 осей. Однако в каждой реальной технологической ситуации взвешиваются или двухосные тележки, четырехосные или шестиосные составы (вер- тешки), поэтому блок 13 идентификации может быть заранее подготовлен для работы в конкретной технологии. Например, перемычка на клеммах 26 (фиг. 3) установлена так, что взвешивание 2-осных тележек исключается и взвешиваться могут 4- или 6-ос- ные объекты. Напротив, при соединении перемычкой на клеммах 26 верхнего входа схемы 18с разрешающим потенциалом +5В (через резистор Р) блок 13 идентификации выделяет только 2-осные тележки, так как счетчик 17, досчитав до 2, погашается через ключ 22 и инвертор 24.
Таким образом, устанавливая перемычку на клеммах 26, оператор решает, будет ли|. устройство работать с 2-осными тележка- мирили с 4- и 6-осными объектами.
В последнем случае наиболее частным случаем является ситуация, когда 4-осную вертушку движет 6-осный локомотив или в составе 4-осных объектов имеется нестандартный 6-осный объект.
В этом случае оператор однократно нажимает кнопку 25 при наезде указанного нестандартного объекта на грузоприемные блоки 2, сигналом с инверсного выхода триггера 23 запрещается прохождение сигнала с выхода 4 счетчика 17 и последний, сосчитав до 6, выдает через дешифратор 21, схему 20 сигнал регистрация (РГ) в автокомпенсатор 6, а по приходу от последнего сигнала КИ (Конец измерения) погашает триггер 23 и счетчик 17, так что схема 19, позволяющая регистрировать.4-осные объекты, разблокируется и устройство готово ко взвешиванию 4-осных объектов.
Если в технологии используются 6-ос- ные вертушки, то работа схемы 19 может быть запрещена на все время взвешивания такой вертушки, например, применением кнопки 25 с защелкой, что исключает сбрасывание триггера 23 после каждого взвешивания.
Формула изобретения
1. Устройство для поосного взвешивания подвижных объектов, содержащее расположенные под обоими рельсами железнодорожного пути связанные между собой фундаментные и грузоприемные блоки, тенэодатчики которых пдключены к первому входу автокомпенсатора, к второму входу которого подключен выход блока идентификации, вход которого, третий вход автокомпенсатора и первый вход первого триггера подключены к выходу счетчика-формирователя задержки, первый вход которого подключен к выходу первого ключа, первый вход которого соединен с выходом первого триггера, а второй вход - с первым
выходом автокомпенсатора, второй и третий выходы которого соединены соответственно с первым и вторым входами второго ключа, выход которого подключен к первому
входу регистрирующего прибора, к второму входу которого подключен четвертый выход автокомпенсатора, отличающееся тем, что, с целью повышения точности и надежности, в него введены ключ-распределитель, счетчик-измеритель резервного времени, схема И и второй триггер, причем фундаментные блоки расположены по разные стороны от грузоприемных блоков, вход ключа-распределителя подключен к второму выходу автокомпенсатора, первый, второй и третий выходы ключа-распределителя соединены соответственно с вторым входом счетчика-формирователя задержки, вторым входом второго триггера и первым входом
счетчика-измерителя резервного времени, второй вход которого соединен с выходом схемы И, а выход подключен к третьему входу счетчика-формирователя задержки, три входа схемы И соединены соответственно с
вторым и пятым выходами автокомпенсатора и выходом второго триггера, три входа которого соединены соответственно с выходом счетчика-формирователя задержки и вторым и третьим выходами автокомпенсатора.
2. Устройство по п. 1. отличаю щее- с я тем, что блок идентификации выполнен в виде счетчика измерений, трех схем И, дешифратора, ключа, триггера, инвертора,
кнопки и резисторов, причем вход блока образован первым входом счетчика измерений, первый выход которого подключен к первому входу первой схемы И и первому входу дешифратора, а второй выход подключей к первому входу первой схемы и к первому входу дешифратора, а второй выход подключен к первому входу второй схемы И и второму входу дешифратора, выход которого соединен с обоими входами
третьей схемы И, второй вход первой схемы И соединен с резисторами, а второй вход второй схемы И подключен к выходу триггера, к одному входу которого подключена кнопка, а к другому - выход ключа и вход
инвертора, выход которого подключен к второму входу счетчика измерений, выходы схем И соединены между собой и подключены к входу ключа и этим соединением образован выход блока.
ог-


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для поосного взвешивания подвижного состава | 1986 |
|
SU1315822A1 |
| Способ поосного взвешивания подвижных объектов | 1988 |
|
SU1522045A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для взвешивания | 1976 |
|
SU657270A2 |
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| Устройство для поколесного взвешивания объектов | 1986 |
|
SU1408234A1 |
| Устройство для взвешивания транспортных объектов в движении | 1984 |
|
SU1236322A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность и надежность устройства. Фундаментные блоки 4 расположены по разные стороны от грузоприемных блоков 2, тензодатчики 3 которых подключены к автоиЕича. по 2, о7 компенсатору 6, команду на измерение которому выдает счетчик-формирователь 9 задержки, а на регистрацию - блок 13 идентификации. Счетчик-измеритель 10 определяет резервное время, которым располагает устройство для измерения в зависимости от скорости передвижения каждого объекта по грузоприемным блокам 2. По окончании цикла измерения автокомпенсатор 6 вырабатывает сигнал, по которому триггер 15 устанавливается в исходное состояние, и продолжается наполнение счетчика-измерителя 10 импульсами опорной частоты до съезда взвешиваемой оси с грузоприемных блоков 2. Результаты по взвешенным осям суммируются в автокомпенсаторе 6, а по команде блока 13 идентификации результат фиксируется прибором 7. 1 з.п. ф-лы. 6 ил. СП с VJ с N: ос сг 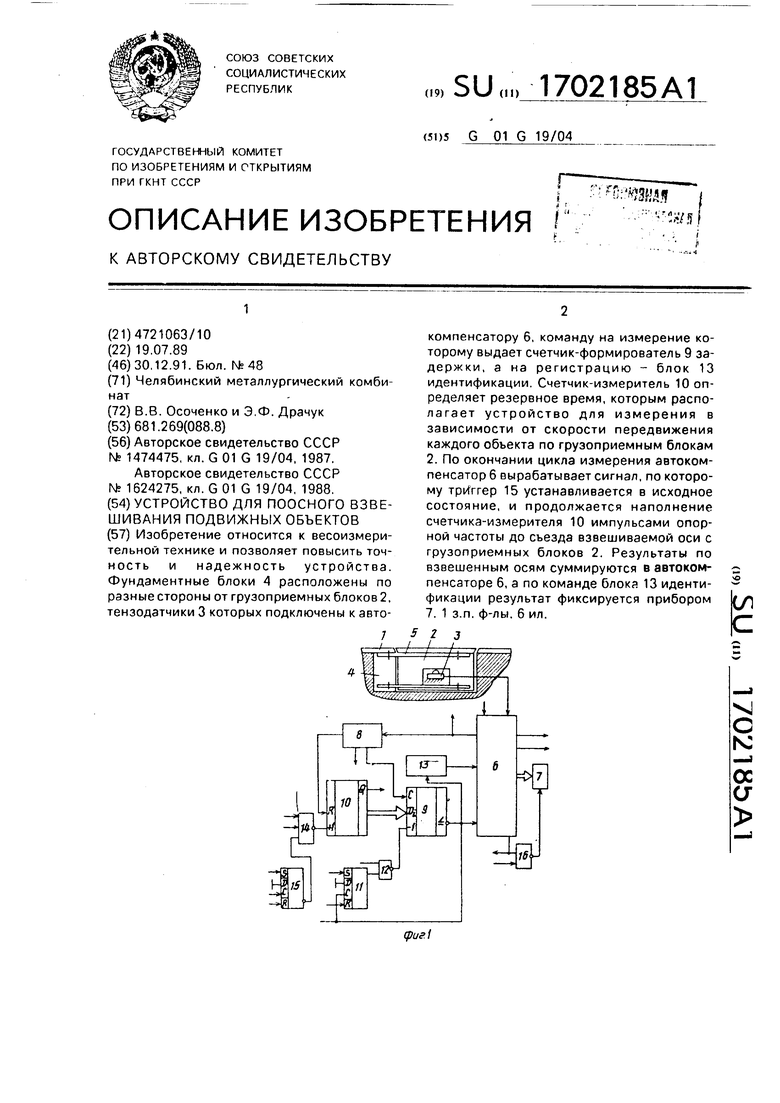
ZH
их
ц
92
-i т
у.
Ш 2 Щ
i
у
Ј Мф
и
о
II
V
L1
И
т /
/
i
S81ZO/.1
/
Триггер 27
MVH
Триггер 27
Ключ 23, Ht
Схема 30, Н2
| Устройство для взвешивания железнодорожных вагонов в движении | 1987 |
|
SU1474475A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для поосного взвешивания подвижного состава | 1988 |
|
SU1624275A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
