Изобретение относится к весоизмерительной технике и предназначено для взвешивания грузопотоков, перемещаемых с помощью железнодорожного транспорта.
Цель изобретения - повышение точности взвешивания при различных скоростях движения состава.
На фиг. 1 и 2 показаны схемы,поясняю- щие сущность способа взвешивания; на фиг.З блочно-кинематическая схема устройства, реализующего способ ; на фиг.-6 - электрические принципиальные схемы узлов устройства.
Способ предусматривает установку под железнодорожным путем весоизмерительных модулей (ВМ), длиной 1 (порядка 1,0 м) и устройство перед модулями мерных участков пути длиной А, например, путем установки на пути 1 путевых датчиков (ПД).
Инструментальная погрешность б ВМ, найденная опытным путем, приведена на диаграмме , где центр координат помещён в центре модулей, а края мо11дулей имеют координаты о и + г.
При движении состава по ВМ, например, показанном стрелкой, при малой скорости движения оси (диаграмма) за аре мя измерения t проходится небольшая леэая часть модулей и, следовательно,
результат измерения занижен.
#
При большой (предельной) скорости движения состава (диаграмма М результат близок к истинному.
Очевидно, при перемене направления движения состава результат на малых скоростях завышен, так как измерение производится на малом правом участке ВМ.
Согласно предлагаемому способу (диаграмма -г) необходимо задержать измерение после наезда на край ВМ на время t так, чтобы в течение непосредственно времени измерения t ось объекта проходила по центральном участку ВМ, что сведет погрешность измерения к минимуму.
Участок измерения в центре модуле может быть невелик (при малой скорости), а время задержки t, соответственно, большим.
При больших (близких к предельным скоростях движения участок измерения по протяженности близок к длине модулей 1, а время задержки t, мало или равно нулю.
Как видно из диаграмм 2 t
2tg+
+t, где tc - общее время движения взвешиваемой оси по ВМ.
tc
Соответственно 1
te- 2
Очевидно
ср
где VP - средняя
скорость передвижения оси.
Согласно предлагаемому способу средняя скорость Vcp определяется
I „ А
на мерном участке А, т.е. V
где t, - время прохождения взвешиваемой осью мерного участка А. Отсю
f- - t tc А t,,
Таким образом,
3 2А
. 40
Для определения времени задержки tj измерения с целью минимизации ошибки от вариации скорости состава необходимо определить время прохожде ния t, взвешиваемой осью мерного участка Л.
Выбор величины участка А производится по следующим соображениям. Ле-
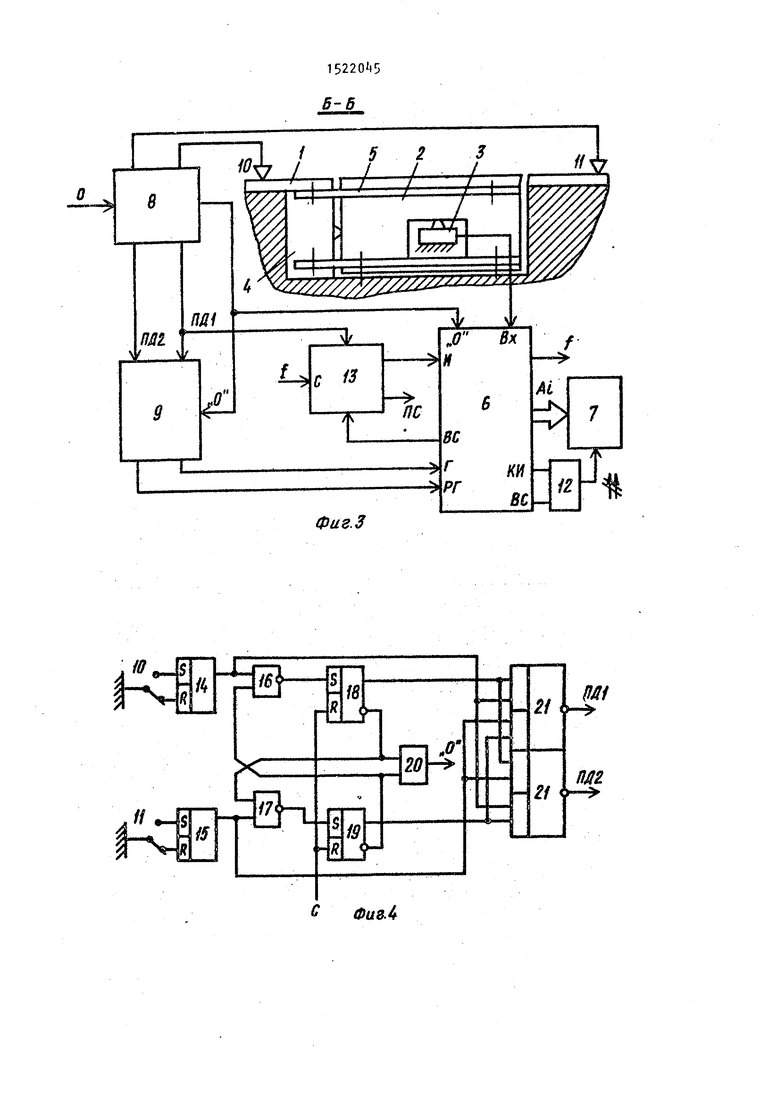
вый и правый путевые датчики (фиг.1) (фиг.5) регистр Начало тележки на целесообразно расположить на расстой- триггерах 22, регистр Конец тележки
на триггерах 23, инвертор 2k, счетный
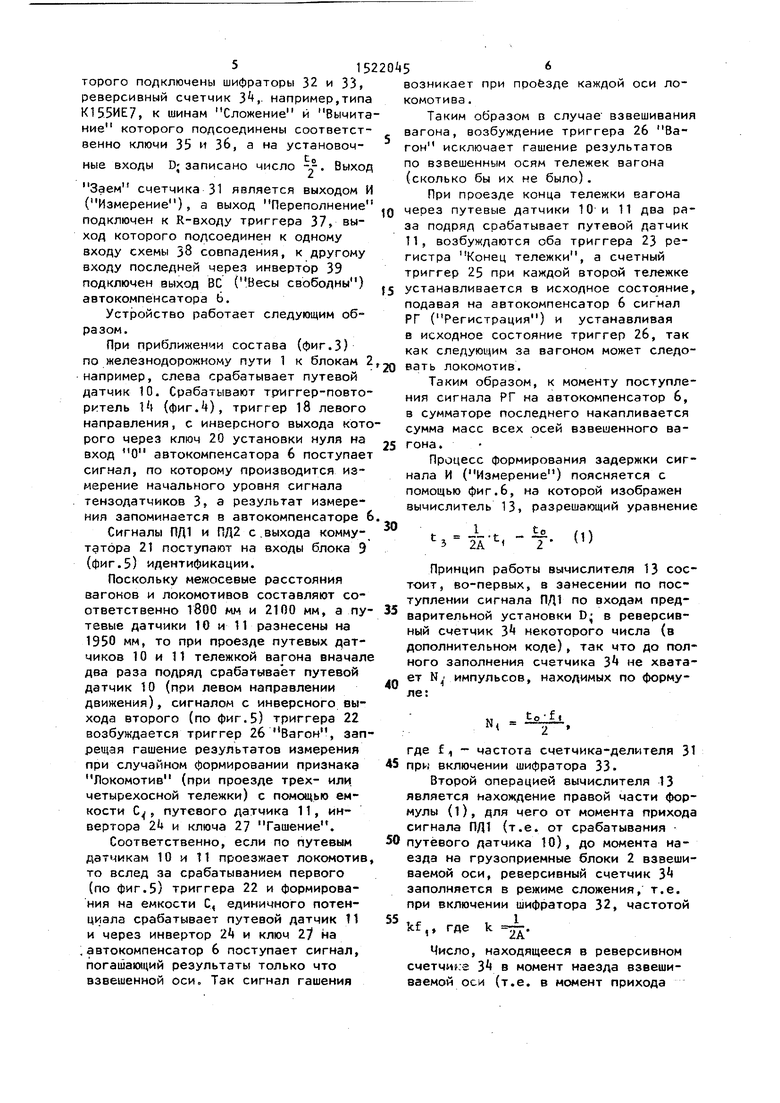
Схема 8 направления содержит (фиг.) триггеры-повторители И и 15 соответственно путевых датчиков 10 . и 11, схемы 1б и 17 совпадения, три1- геры 1.8 и 19 левого и правого направлений, ключ 20 установки нуля, коммутатор 21 .
Блок 9 идентификации образуют
50
НИИ около 1950 мм, что обеспечивает различение вагонов, имею1чих типовое межосевое расстояние около 1800 мм и локомотивов с типовым межосевым расстоянием около 2100 мм. Поскольку серийно выпускаемые ВМ имеют расстояние около 1-1300 мм, то расстояние А целесообразно выбирать равным приб- ли зительно 325 мм. , 55
Блрчно-кинематическая схема устройства состоит из встроенных в желез- нодорожный путь 1 весоизмерительных
триггер 25, триггер 26 Вагон и ключ 27 Гашение. Резисторы R - по- тенциалозадающие, а емкость С4 исполь зована для формирования кратковремен- ной задержки сигнала выхода триггера 22 при подаче на его R-вход усУановоч ного сигнала. . Вычислитель 13 (фиг.6), например, содержит триггеры 28 и 29, схему ИЛИ 30, емкость С 2, счетчик-делитель 31 (например, типа К56ЧИЕ15), к входам ко
0
5
0
5
0
35
40
(фиг.5) регистр Начало тележки на триггерах 22, регистр Конец тележки
модулей, содержащих грузоприемные блоки 2, опирающиеся на т.ензодатчики
3и связанные с фундаментными блоками
4струнками 5. Тензодатчики 3 соединены параллельно и подключены к аналоговому входу абтокомпенсатора 6, информационные выходы А; которого скоммутированы с регистрирующим прибором 7. С входом установки нуля (О) автокомпенсатора 6 соединен первый выход схемы 8 направления, подключенный также, как и другие выходы схемы 8, к входам блока 9 индентификации.
На входы схемы 8 направления подключены путевые датчики 10 и 11, а с помощью известных способов подается сигнал С (Сброс) после (или перед) взвешивания каждого состава.
Выходы блока Э подключены к входам гашения (Г) и регистрации (РГ). автокомпенсатора 6. Выход ВС (Весы свободны) автокомпенсатора 6 подсоединен к входу ключа 12 (вместе с выходом КИ (Конец измерения) автокомпенсатора 6) и входу вычислителя 13. Другие входы вычислителя 13 связаны с выходом ПД 1 схемы 8 и входом опорной частоты f блока 6, а выход соединен с входом И (Измерение) последнего. Выход ключа 12 (Не считать) подключен к управляющему входу регистрирующего прибора 7, а выход ПС (Превышение скорости) вычислителя 13 может быть использован для включения сигнализации машинисту локомотива о превышении скорости.
Схема 8 направления содержит (фиг.) триггеры-повторители И и 15 соответственно путевых датчиков 10 . и 11, схемы 1б и 17 совпадения, три1- геры 1.8 и 19 левого и правого направлений, ключ 20 установки нуля, коммутатор 21 .
Блок 9 идентификации образуют
триггер 25, триггер 26 Вагон и ключ 27 Гашение. Резисторы R - по- тенциалозадающие, а емкость С4 использована для формирования кратковремен- ной задержки сигнала выхода триггера 22 при подаче на его R-вход усУановоч- ного сигнала. . Вычислитель 13 (фиг.6), например, содержит триггеры 28 и 29, схему ИЛИ 30, емкость С 2, счетчик-делитель 31 (например, типа К56ЧИЕ15), к входам которого подключены шифраторы 32 и 33, реверсивный счетчик 3, например,типа К155ИЕ7, к шинам Сложение и Вычитание которого подсоединены соответственно ключи 35 и Зб, а на установочные входы D; записано число -. Выход
Заем счетчика 31 является выходом И (Измерение), а выход Переполнение подключен к R-входу триггера 37, выход которого подсоединен к одному входу схемы 38 совпадения, к другому входу последней через инвертор 39 подключен выход ВС (Весы свободны) автокомпеисатора 6.
Устройство работает следующим образом.
При приближении состава (фиг.З) по железнодорожному пути 1 к блокам 2 например, слева срабатывает путевой датчик 10. Срабатывают трт ггер-повто- (фиг.), триггер 18 левого направления, с инверсного выхода которого через ключ 20 установки нуля на вход О автокомпенсатора 6 поступает сигнал, по которому производится измерение начального уровня сигнала тензодатчиков 3, а результат измерения запоминается в автокомпенсаторе 6
Сигналы ПЛ1 и ПЛ2 с.выхода коммутатора 21 поступают на входы блока 9 (фиг.5) идентификации.
Поскольку межосевые расстояния вагонов и локомотивов составляют соответственно Т800 мм и 2100 мм, а путевые датчики 10 и 11 разнесены на 1950 мм, то при проезде путевых /датчиков 10 и 11 тележкой вагона вначале два раза подряд срабатывает путевой датчик 10 (при левом направлении движения), сигналом с инверсного выхода второго (по фиг.5) триггера 22 возбуждается триггер 26 Вагон, запрещая гашение результатов измерения при случайном формировании признака Локомотив (при проезде трех- или. четырехосной тележки) с помощью емкости С, путевого датчика 11, инвертора 2 и ключа 27 Гашение.
Соответственно, если по путевым датчикам 10 и 11 проезжает локомотив, то вслед за срабатыванием первого (по фиг.5) триггера 22 и формирования на емкости С, единичного потенциала срабатывает путевой датчик 11 и через инвертор 2 и ключ 27 на .автокомпенсатор 6 поступает сигнал, погашакйций результаты только что взвешенной оси. Так сигнал гашения
5
0
5
возникает при проезде каждой оси локомотива .
Таким образом в случае взвешивания вагона, возбуждение триггера 26 Вагон исключает гашение результатов по взвешенным осям тележек вагона (сколько бы их не было).
При проезде конца тележки вагона через путевые датчики 10 и 11 два раза подряд срабатывает путевой датчик 11, возбуждаются оба триггера 23 регистра Конец тележки, а счетный триггер 25 при каждой второй тележке устанавливается в исходное состояние, подавая на автокомпенсатор 6 сигнал РГ (Регистрация) и устанавливая в исходное состояние триггер 26, так как следующим за вагоном может следовать локомотив.
Таким образом, к моменту поступления сигнала РГ на автокомпенсатор 6, в сумматоре последнего накапливается сумма масс всех осей взвешенного вагона .
Процесс формирования задержки сигнала И (Измерение) поясняется с помощью фиг.6, на которой изображен вычислитель 13, разрешающий уравнение
30
1 2А
-. (1)
35
40
Принцип работы вычислителя 13 состоит, во-первых, в занесении по поступлении сигнала ПЛ1 по входам предварительной установки D в реверсивный счетчик З некоторого числа (в дополнительном коде), так что до полного заполнения счетчика 3 не хватает N импульсов, находимых по формуле:
N
где fi - частота счетчика-делителя 31
5 при включении шифратора 33.
Второй операцией вычислителя 13 является нахождение правой части формулы (1), для чего от момента прихода сигнала ПД1 (т.е. от срабатывания
50 путёвого датчика 10), до момента наезда на грузоприемные блоки 2 взвешиваемой оси, реверсивный счетчик 3 заполняется в режиме сложения, т.е. при включении шифратора 32, частотой
55 ,, ,1 kf,, где k .
Число, находящееся в реверсивном счетчиг.е 3 в момент наезда взвешиваемой оси (т.е. в момент прихода
сигнала ВС), представляет собой чис
соответствующее
Ш „
Это время
,
времени за- задержки t.
to
автоматически реализуется вычислителе 13 в процессе перемещения взвешиваемо оси по блокам 2 путем заполнения счетчика 3 частотой f, 8 режиме вычитани до получения от счетчика З сигнала Заем.
Допустим, мм, мм, 0,5 с, ,0, кГц, кГц. Счетчик-делитель 31 примененного типа может обеспечить практически любой не обходимый (в том числе дробный) коэф фициент деления, что позволяет использовать вычислитель 13 при любых соотношениях 1 и А.
При срабатывании путевого датчика 10, формирующего сигнал ПД1, на входы счетчика З записывается число,
соответствующее tp -|-«1000 250 ед.
что в дополнительном коде при емкости счетчика 3.в 9999 единиц составляет 9750. Кроме того, при срабатывании путевого датчика 10 возбуждается {фиг.6).- триггер 28, сигналом с выхода которого включается шифратор 32 представляющий собой набор ключей, обеспечивающий необходимый коэффициент деления К счетчика-делителя 31. Ключ 35: открывается, я счетчик 3 работает в режиме сложения, запол
няемый частотой t.
(2 кГц) до наез- на грузоприемные
да взвешиваемой оси блоки 2.
При этом возможны два принципиально различных режима работы (диаграмму .9) .
Если от момента срабатывания путевого датчика 10 до наезда на блоки 2 (т.е. на мерном участке Л) в некоторый момент времени t с выхода счетчика 5: приходит сигнал переполнения, что означает, что скорость движения состава не превышает предельной и измерение возможно, т.е. если счетчик З . содержимое которого в момент срабатывания путевого датчика 10 определялось кодом 9750, на мерном участке А переполнился, то измерение возможно.
Пусть код счетчика в момент наезда взвешиваемой оси на блоки 2 составлял 120 ед. Тогда в момент tj вследствие срабатывания триггера 29 шифратора 33 и ключа 36 начинается
опорожнение счетчика З частотой
очевидно, через время 0,12 с с выхода счетчика З
г
10
. сигналом
,
25 JQ20
1.кГц
120
1000
поступит сигнал заема (), поступающий на автокомпенсатор 6 как сигнал измерения.
Другой режим работы используется при превышении составом предельно допустимой скорости движения. Б этом режиме с выхода переполнения (5) счетчика 3 сигнал не поступает,триггер 37, предварительно возбужденный
ПД1, не сбрасывается (что происходит в нормальном режиме) и при наезде взвешиваемой оси на блоки 2 сигналом 6С через инвертор 39 и схему 38 совпадения формируется нал ПС (Превышение скорости), который может быть подан, например, на светофор для машиниста локомотива, который повторяет провеску состава при нормальной скорости движения. Таким образом, вычислитель 13 осуществляет описанный жесткий алгоритм выдачи сигнала измерения при взвешивании каждой оси состава. Алгоритм вычисления реализуется с момента наезда оси на путевой датчик 10 (11) до выдачи сигнала измерения, устанавливающего через схему ИЛИ 30 триггер 29 в исходное состояние.
Если по каким-либо причинам машинист состава значительно увеличил скорость движения уже после выдачи сигнала измерения, так что к моменту окончания измерения (с выхода автокомпенсатора 6 поступает сигнал КИ (Конец измерения) взвешиваемая ось съехала с блоков 2 (т.е) появился сигнал ВС), то с выхода ключа 12 на управляющий вход регистрирущего прибора 7 поступает сигнал Не считать, выпечатываемый посл.е результата 1змерения.
После окончания взвешивания состава с помсн-чью известных устройств на вход схемы 8 направления подается сигнал С (Сброс), после чего устройство готово к взвешиванию очередного состава,
Формула изобретения
55 Способ поосного взвешивания подвиж- ;ных объектов, включающий установку под железнодорожным путем весоизмерительных модулей длиной Ij перемещение
35
40
45
50
объектов по весоизмерительным модулям, измерение осевых усилий, действующих на весоизмерительные модули, за фиксированное время t, суммирование измеренных усилий и регистрацию масс, объектов, отличающийся тем, что, с целью повышения точности взвешивания при различных скоростях
ми устраивают мерные участки пути длиной А, после чего определяют интервал t времени прохождения колесом мерного участка, а начало измерения осевого усилия задерживают после прохождения мерного участка на время t.., определяемое из выражения 



Изобретение относится к весоизмерительной технике и позволяет повысить точность взвешивания грузопотоков в движении при различных скоростях состава. Для этого перед весоизмерительными модулями (ВМ) устраиваются мерные участки пути А, например ограниченные путевыми датчиками с одной стороны и ВМ с другой. Для устранения вариации показаний при изменении скорости движения состава предлагается задерживать измерение каждой взвешиваемой оси после наезда ее колес на ВМ на время T3, определяемое математическим выражением, приведенным в описании изобретения. 6 ил.
Дбижени
Т
ю
./
-Эм
о
4
Фиг.З
fff
к:
rv
Фи8.4
W
-
Физ.5
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М., 1981 | |||
| Вентилятор | 1924 |
|
SU1315A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
