Изобретение относится к технике динамической балансировки и может быть ис- ио.тьзовано в электроприводах балансировоч- Hijix станков для унравления тормозом, разжим которого производится электромагни- ТОЛ1 иостоянного тока.
Цель изобретения -- расширение технологических возможностей и повьинение надежности электропривода.
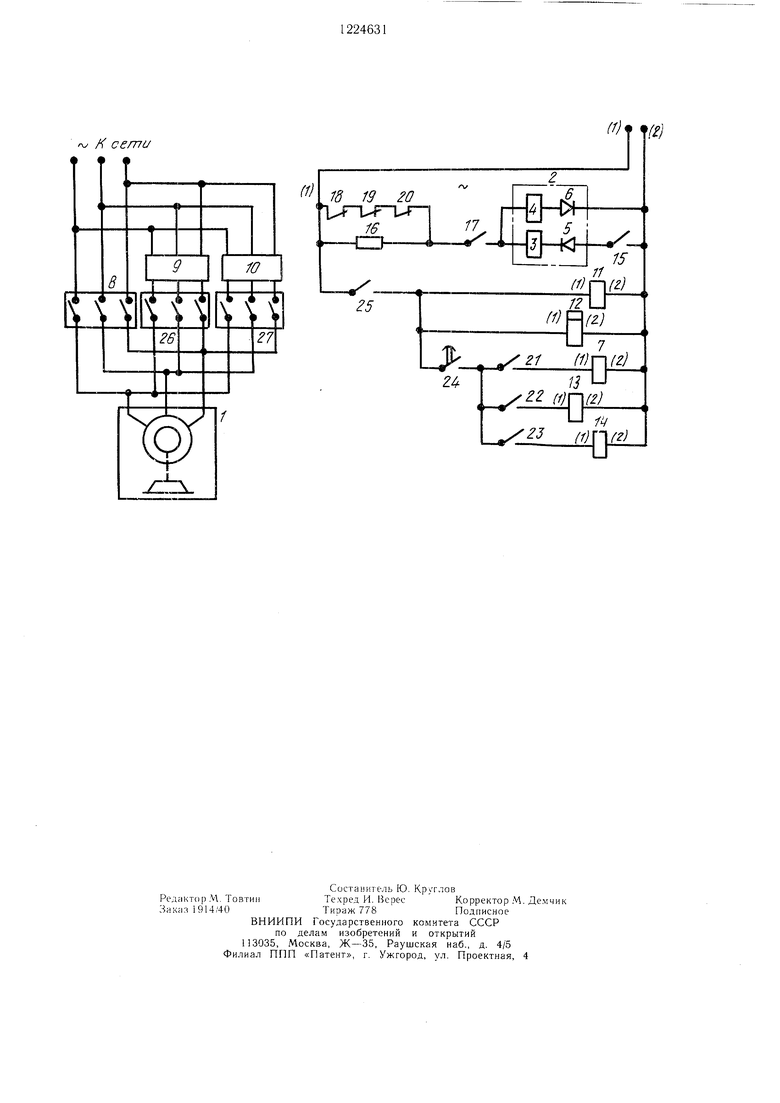
На чертеже нредетанлена схема электропривода балансировочного станка, управ- ляемого измерител)Но-унрав.чяющим устройством.
Электрон|1ивод балансировочного станка, управляемого измерительно-у11равляюи1им устройством, содержит самотормоз трехфазный элсктродвигате.ть 1. управляющая катушка 2 тормоза которого выио.т- нена в виде двух иолуобмоток 3 и 4 и образую- И1их выпрямитель диодов 5 и 6, начало иервой полуобмотки 3 соединено с анодом нервого диода 5 встроенного выпрямителя, конец - - с началом второй иолуобмотки 4, конец которой соединен с катодом второго диода 6 выпрямителя, а анод второго диода 6 соединен с второй шиной измеритель- ио-уиравляюшего устройства, коммутатор 7 вран1ения э;1ектродвигателя 1, силовые контакты 8 которого включены в цепи фаз э. :ек- тродвигателя 1 и соединены с сетью, а обмотка управления вторым зажимом соединена с второй шиной, два источника 9 и 10 пониженного напряжения, предназначе1шые для соединения с еетью, аппарат 11 включения тормоза и реле 12 времени, первые зажимы обмоток управления которых соединены между собой, коммутатор 13 уетано- вочного вран1,ения электродвигателя i и коммутатор 14 позиционирования, вторые зажимы обмоюк управления которых соединены между собой, с вторыми зажимами обмоток управления коммутатора 7 вран1е- ния, аппарата 11 вк.тючения тормоза и ре.пе 12 времени, с второй шиной измери- тельно-унрав.тяюндего устройства и через первый замыкаюи1,ий контакт 15 анпарата 1 I включения тормоза с катодом первого диода 5, и балластный резистор 16, сое- дипениый с первой птной измерительно- уирав.тяюше1Ч) устройства и через второй замыкаюн.ий контакт 17 аппарата 11 включения тор.моза с концом первой и началом второй нолуоб.мотки 3 и 4, баллает1 ый резиетор 16 зашуптирован последовательно соединенными размыкающими контактами 18, 19 и 20, управляемыми соответс венно коммутатором 7 вран|еиия, коммутатором i3 установочного вращения и коммутатором 14 нозициоиирования, нервые зажимы уп- равляю дих обмоток которых связаны еоот- вететвенно через второй., третий и четвертый контакты 21, 22 и 23 измерительно- управляюн его устройства между собой, а затем через замыкающий контак:- 24 реле 12 времени -- с нервы.ми зажимами обмоток
5
унравления анпарата 1 1 включения тормоза и реле 12 времени и с одним из зажимов первого контакта 25 измерительно-управляющего уетройства, второй зажим контакта 25 , соединен с иервой ншной измерите:1ьно- управляющего устройетва, силовые контакты 26 ко.ммутатора 13 установочного вращения соединены с ггервым источшжом 10 пониженного нан)яжения и включены в цепи фаз электродвигателя 1, куда также
0 включены соединенные с вторым источни- ко.м 10 пониженного напряжения силовые контакты 27 коммутатора 14 позиционирования.
Электропривод работает с,:1едуюшнм образом.
При замыкании первого контакта 25 измерител ьно-уиравляюнтего устройства включаются обмотки управления аппарата II включения тормоза и реле 12 времени. Замыкающими контакта.ми 15 и 17 аппарата
0 11 включения тормоза, обеспечивая форсированный режи.м, нодключается уиравляю- шая катун1ка 2 тормоза с встроенным вы- нрямителе.м. Ко.лодки тор.моза разжимаются, давая возможность проворачивать ротор электродвигататя 1 и кинематически связаниьп-i с ним балансируемый ротор. За.мыкаюпхий контакт 24 реле 12 времени с задержкой времени, необходимой для разжима тормоза, подготавливает цепь для включения одного из трех коммутаторов. При замыкании второго контакта 21 измерительно-управляющего устройства включается обмотка управления ко.ммутатора 7 вращения, силовые контакты 8 которого подключают электродвигатать 1 к сети, а размыкающий контакт 18 отключает режим форснровашюго питания управляющей катушки 2 т ор.моза, вводя в ее цепь балластиый резистор 16. Э;1ектродви- гатель 1 производит враи1ение балансируемого ротора, в из.мерительно-унравляюще.м устройстве производится определение нара0 метров дисбаланса ротора.
При замыкаиии третьего контакта 22 измерител Ы10-уцравляющего устройства включается обмотка управления коммутатора J:3 установочного вращения электродвигателя, еиловые контакты 26 которого подключают электродвигатель 1 к источнику 9 ноиижеиного напряжения, а размыкаюи1ий контакт 19 отключает режим форсированного иитания управляющей катушки 2 тормоза, вводя в ее цепь балластный резистор
0 16. Производится быстрое (грубое) установочное вращение баланеируемого ротора иод корректирующую головку за счет ослабления вращающего момента кинематически связанного с ним электродвигателя 1 при питании его нониженны.м иапряже5 ьщем.
При замыкании четвертого контакта 23 из.мерительпо-управляющегоустройства
включается обмотка упоав.тения коммчтато0
.5
pa 14 позиционирования, силовые контакты 27 которого подключают электродвигатель 1 к источнику 10 пониженного напряжения, а размыкающий контакт 20 отключает режим форсированного питания управляющей катущки 2 тормоза, вводя в ее цепь балластный резистор 16. Производится медленное (точное) установочное вращение балансируемого ротора под корректирующую головку за счет ослабления вращающего момента кинематически связанного с ним электродвигателя 1 при питании его пониженным напряжением.
При размыкании первого контакта 25 измерительно-управляющего устройства происходит отключение электродвигателя 1 и катущки 2 тормоза. Под действием пружины тормоза ротор электродвигателя 1 и кинематически связанный с ним балансируемый ротор затормаживаются.
Таким образом, раздельное управление катущкой тормоза и электродвигателем по командам измерительно-управляющего устройства позволяет расщирить технологические возможности электропривода за счет возможности осуществления установочного вращения и позиционирования балансируе.мого ротора, а также прово- рота ротора электродвигателя и кинематически связанного с ним балансируемого ротора при отключенном от сети электродвигателе, и повысить надежность электропривода за счет упреждающего и формированного включения тормоза.
Формула изобретения
Электропривод балансировочного станка, управляемый измерительно-управляющим устройством, содержащий трехфазный электродвигатель с тормозом, управляющая катущка которого выполнена в виде двух полуобмоток и выпрямителя, представляющего собой два диода, начало первой полуобмотки соединено с анодом первого диода, конец - с началом второй полуобмотки, конец которой соединен с катодом второго диода, а анод второго диода предназначен для связи с второй щиной измерительно-управляющего устройства, коммутатор вращения электродвигате пя, силовые
контакты которого включены в цепи фаз электродвигателя и предназначены для соединения с сетью, а второй зажим обмотки управления коммутатора предназначен для соединения с второй тиной измерите.льно- управляющего устройства, отличающийся тем, что, с целью расширения технологических возможностей и повышения надежности, электропривод снабжен двумя источниками пониженного напряжения, соединя0 емыми с сетью реле времени и аппаратом включения тормоза, первые зажимы обмоток управления которых соединены между собой и предназначены для соединения через первый контакт измерительно-управляющего устройства с первой щиной его, а вторые зажимы - с второй шиной измерительно- управляющего устройства, коммутатором установочного вращения электродвигателя и коммутатором позиционирования, первые зажимы обмоток управления которых пред0 назначены для соединения соответственно через третий и четвертый контакты измерительно-управляющего устройства между собой и через замыкающий контакт реле времени с первыми зажимами обмоток управления реле времени и аппарата включения тормоза, а через второй контакт измерительно-управляющего устройства - с первым зажимом обмотки управления коммутатора вращения электродвигателя, а вторые зажимы - с второй шиной измерительно-управляющего устройства и через первый замыкающий контакт аппарата включения тормоза - с катодом первого диода, силовые контакты включены в цепи фаз электродвигателя и присоединены соответственно к первому и второму источникам пониженного напряжения, и балластным резистором, защунтированны м последовательно соединенными размыкающими контактами коммутатора вращения электродвигателя, коммутатора установочного вращения и коммутатора позиционирования
0 и предназначенным для соединения с первой шиной измерительно-управляющего устройства и через второй размыкающий контакт аппарата включения тормоза с концом первой и началом второй полуобмоток управляющей катушки тормоза.
5
0
5
(1)
18 19 20
V -b-p-ur-j
,- г- 1--iL
г
J
ЕЙ
5
5
(Г
Q
11
15 {)
12
7
tT t 24/Л-J
/J 1ЖШ
/fy
/у
: (1)л
о
(2)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электродвигателем | 1987 |
|
SU1448379A1 |
| Устройство для защиты трехфазного электродвигателя от обрыва фазы | 1984 |
|
SU1354325A1 |
| Электропривод балансировочного станка | 1986 |
|
SU1298557A2 |
| Регулируемый электропривод | 1983 |
|
SU1117806A1 |
| Устройство для управления разжимом подвески балансировочного станка | 1984 |
|
SU1196706A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Измерительное устройство к балансировочному станку | 1973 |
|
SU694784A1 |
| Устройство для защиты от недопустимой частоты вращения электродвигателя привода шпинделя тяжелого балансировочного станка | 1982 |
|
SU1092645A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
Изобретение относится к технике динамической балансировки и может быть использовано в электроприводах балансировочных станков. Целью изобретения является расширение технологических возможностей и повышение надежности за счет осуществ„тения установочного вращения и позиционирования ротора и за счет упреждающего включения тормоза. Измерительно-управляющее устройство замыкает поочередно контакты, соответственно подключая электродвигатель к сети и к источникам пониженного напряжения, что обеспечивает соответственно рабочее вращение, установочное вранхение и позиционирование ротора. Управление катушкой тормоза осуществляется раздельно от системы управления электродвигателем с помощью замыкания контакта. 1 ил. (Л ю ю 4:: О5 СО
| Васильев В | |||
| С., Кушко П | |||
| С | |||
| Станки и приборы для динамической балансировки | |||
| М.: Машгиз, 1959, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Прибор для штрихования | 1928 |
|
SU9132A1 |
| Схема электрическая принципиальная, лист I, ГСКТБ ПБС.- Минск, 1982. | |||
