Настоящее изобретение относится к импульсным следящим системам, содержащим орган сравнения задающего сигнала с сигналом обратной связи, измерительны} элемент, преобразующий сигнал рассогласования в импульсный сигнал, корректирующее звено и преобразователь, вырабатывающий выходное напряжение.
Предлагаемая система отличается от известных тем, что в качестве корректиру1()И1,его звена применено с.тедяи1ее устройство, вьтполпенное с больщим запасом устойчивости, которое отрабатывает сигнал рассогласования в начале его периода, а затем возвращается в нулевое положение, в котором остается до конца периода импульсного сигнала.
В результате этого качество отработки следящей системы не зависит от пестабилыюсти периодов импу;1ьсных сигналов, а также от изменения передаточного отношения системы при условии, что передаточные отношения импульсного элемента и органа сравнения стабильны.
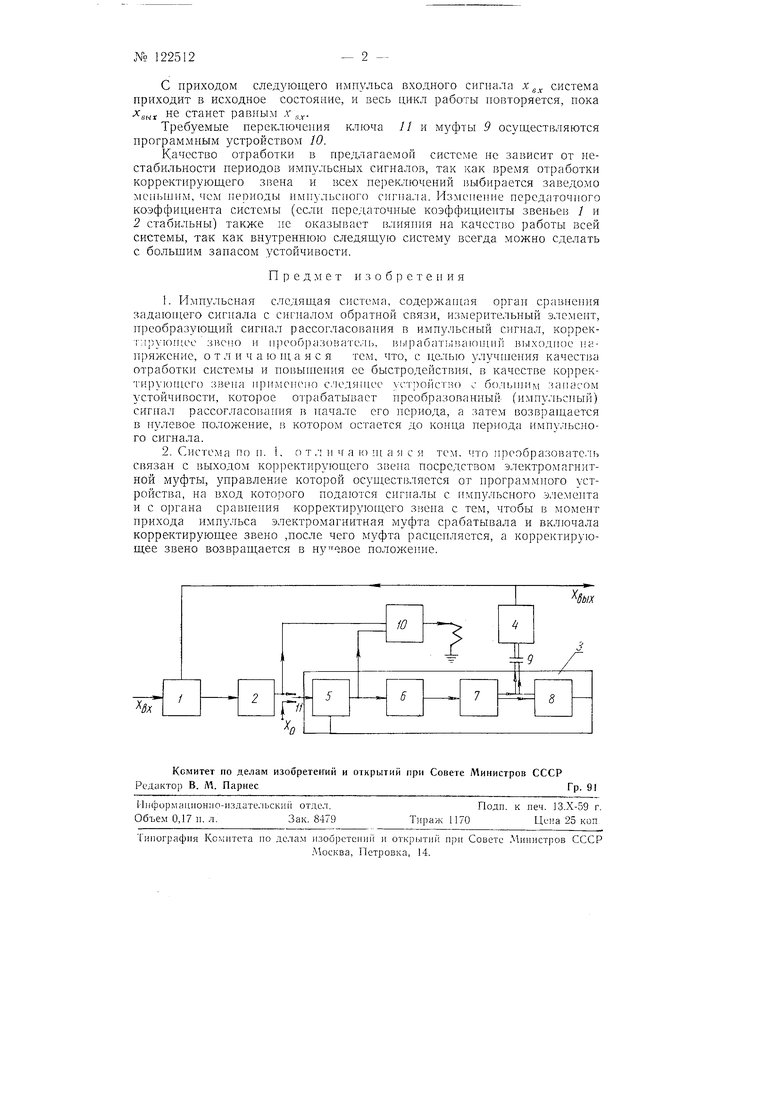
На чертеже изображена блок-схема предлагаемой системы.
Система содержит орган сравнения / задающего сигнала л с сигналом обратной, связи хд,„ . измерительный элемент 2, преобразующий сигнал рассогласования в импульсный сигнал, корректирующее звено 3 и преобразователь 4. вырабатывающий выходное напряжение. В качестве корректирук)Н1его звена применено следян1ее устройство с больщим запасом устойчивости , состоящее из органа сравнения 5, усилителя 6, исполнительного устройства 7 и преобразователя 8. Оно отрабатывает преобразованный (импульсный) сигнал в начале его периода, а затем возвращается в нулевое положение, в котором и остается до конца периода импульсного сигнала.
Преобразователь 4 следящей системы с помоп1,ью электромагнитной муфты 9 связан с выходом корректирующего звена. Управление муфтой осуществляется от программного устройства W, на вход которого подаются сигналы с измерительного элемента 2 и с органа сравнения 5 KOppeKTHpyioHiero звеиа с тем, чтобы в момент прихода шшуль са электромагнитная муфта срабатывала и включала корректируюп1,ее звеио. После этого муфта расцепляется, а корректирующее звено возвращается в нулевое положение путем подачи на его вход ключом // нулевого сигнала XQ.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ АМПЛИТУДНЫХ ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА СЛЕДЯЩЕГО ТИПА | 2004 |
|
RU2269867C1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| Следящая система | 1990 |
|
SU1829024A1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| Следящая система | 1983 |
|
SU1105858A1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
