Мастоя1дее изобретение относится к устроГктвам для управ.пеиия электроирнводом иостоянпого тока ио системе Г-Д (.liroo УРВ-Д), иредназиачеииым д,1я отрасотки задлП.ых иеремсщешм при измеиеиии скорости Д1;р1гате,1я по треугольному либо траиецеидальному графику с контролем постоянства ускорения и автоматическим переключением двигателя в режим торможеиия.
Предлагаемое ycrpoiieTBO отличаетея от известиых тем, что для ои)еделения MOMeirra иереключения ирименена иифровая система ;: реверсивным двоичным сче1чиком, иа вход которого подаются ими).1ьсы от преобразователя вал-цифра, причем в период разгоиа указанные импульсы вводятся в иредпослед:ти 1 р;1зряд, а нрИ враи1,епии двигателя с установиви1е11ея скоростью - непосред;твеиио в нос.тедиш разряд ечетчика.
Такое вь;полнеиие устройств;: ноззо.чяет )К1высить точность отработки электроир; вода.
Ма чертеже изображена прииц1 Ииа.И)Иая ехема иред.чагаемого устройства.
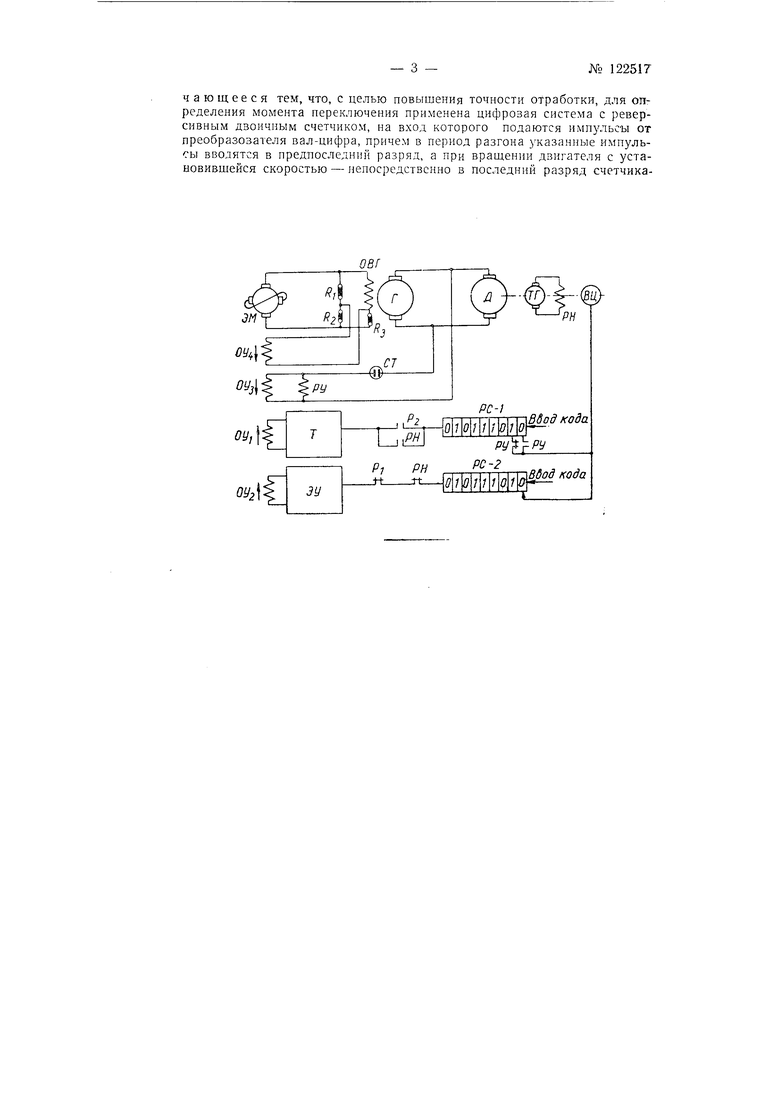
Э.1ектро ри;5од содсржит двшате/Из Д и генератор Г, возбуждаемглГ)от э.1е1сгроман1иииого усилите.ля ЭМ с дз.умя зада1сн;ими обмотками ОУ| 11 Обмотка ОУ иодк.110ч1;1а к выходу электронного триггера Г цифровой оптимальной еи.темы управления, а обмотка ОУ2 - к выходу электронио о уси,1ителя ЭУ обычно цифрово еледяпкп системьг Э;1ектромаи1иниы1( уси.1ите.1ь имеет также обмотку ОД з, огралшчиваюихую екорость враи1,е:1ия двигате.чя, и обмотк - ОУ отрииате.чьпо обратной связи ио производиоГг от э.д.с- генератора; эта связь выделяется с иомонхью извеетной wocTOBOii iCxeMbi, еостав;1еиной из соп.роти;5,теиий R, R-2, RZ и обмотки возбуждения геиератора ОВГ. С иомоииио обмотки ОУ( поддерживается иостоянпой Lie.niMnna ускорения двигате.тя. Обмот№ 122517
ка ОУз включена последовательно со стабиловольтом СТ на зажимы генератора и дейетвует навстречу ОУ) и ОУ2, что обеспечивает ог1)аничение на11 яжения генератора и скорости врани ппя двигателя.
Система оптимального управления работает следуюншм образом. Величина пути, который необходимо отработать, вводитЛ в виде последовательною или параллельного кода одновременно в реве)сивные двоичные счетчики РС-1 и РС-2. До ввода кода ко ггакты реле PI на определенное время отключают выходную 1;епь счетчика РС-2. После ввода кода реле PZ замыкает кратковременно свои нормально открытые (Н.О) контакты и подключает к триггеру Т счетчик РС-1 оптимальной цифровой системы управления.
В зависимости от знака введенного в счетчики задания, триггер срабатывает и двигатель начинает вращаться в ту или другую сторону. Тогда реле РН, обмотка которого подсоединена к зажимам тахогеиератора, включается и П1унтирует своими Н.О. контактами контакты реле УЧ,. В результате счетчик PC-} остается подключенным, а счетчик РС-.--отключенным от еистемы управления.
При разгоне двигателя, когда скорость враш,ения двигателя п ,-, ла«с реле РУ, включенное параллельно обмотке ограничения напряжения ОУз, отпуш,ено и импульсы от преобразователя вал-цифра ВЦ через нормально закрытый контакт реле РУ вводятся в предпоследний разряд двоичного реверсивного счетчика РС-1.
Таким образом, число импульсов, полученных от преобразователя ВЦ при отработке малой величины пути, как бы умножается на дза. Этим .при разгоне заранее учитывается путь, который будет отработан впоследствии при торможении двигателя- При скорости вращения двигателя п,)п ,„.реле РУ срабатывает, и импульсы через нормально открытый контакт реле РУ вводятся непосредственно в последний разряд реверсивного счетчика.
Переключение триггера Т и изменение знака управляющего воздействия происходит, когда в счетчике РС-1 будет заппсан «нуль во всех разрядах, т. е. будет отработан путь ,, где S -путь торможения с данной скоростью я ,,„ при постоянно.м ускоренни. В завнс 1мости от величины заданного пути отработки двигатель будет тормозитьея, не достигнув или доетигнув .макснмальной скорости вращения, так ч го к моменту, когда скорость вр.ащения двигателя станет равной нулю, будет отработан заданный путь. При я -0 чувствительное реле РН отю.ючит реверсивный счетчик РС-1 от триггера Г, одновременно подключив к триггеру счетчик РС-2 обычной цифровой следящей системы.
Еслп оптимальная система точно отработала заданный нуть, то во всех разрядах счетчика РС-2 будет записан нуль, так как число нолученных импульсов с датчика вал-цифра будет соответствовать ранее взеденному коду.
При наличии небольшого рассогласования, не отработанного оптимальной системой, в счетчике РС-2 будет .4a)iHcai;a какая-то величина. Она отрабатываетея обычной цифровой еледящей еистемой, в которую входит реверсивный счетчик РС-2.
Предмет изобретения
Устройство для управления электроприводом постоянного тока по системе Г-Д (либо УРВ-Д), предназначенное для отработки заданных перемещений при изменении скорости двигателя по треугольному либо трапецеидальному графику с контролем постоянства ускорения и автоматическим переключением двигателя в режим торможения, от л ичающееся тем, что, с целью повышения точности отработки, для определения момента переключения применена цифровая система с реверсивным двоичным счетчиком, на вход которого подаются импульсы от преобразователя вал-цифра, причем в период разгона заказанные импульсы вводятся в предпоследний разряд, а при вращении двигателя с установившейся скоростью - непосредственно в последний разряд счетчика
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом постоянного тока | 1959 |
|
SU122516A1 |
| Устройство для автоматического управления нажимным механизмом прокатного стана | 1954 |
|
SU99127A1 |
| Устройство для возбуждения электродвигателя постоянного тока | 1948 |
|
SU78149A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| Сервопривод с двухфазным асинхронным двигателем | 1956 |
|
SU109921A1 |
| ИЗМЕРИТЕЛЬ АМПЛИТУДНО-ЧАСТОТНЫХ И ФАЗО- ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЧЕТЫРЕХПОЛЮСНИКОВ | 1968 |
|
SU212362A1 |
| Система позиционного управления | 1985 |
|
SU1247832A1 |
| ДЕКОДИРУЮЩЕЕ УСТРОЙСТВО «КОД-УГЛОВОЕ» ПЕРЕМЕЩЕНИЕ ВАЛА | 1973 |
|
SU391724A1 |
| СИСТЕМА ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1970 |
|
SU269246A1 |
| Цифровой импульсный электропривод постоянного тока | 1988 |
|
SU1552323A1 |