1
Изобретение предназначено для применения в цифровых управляющих системах, осуществляющих прямое цифровое регулирование технологического процесса, а также в разных устройствах автоматики и телемеханики, где требуется преобразование двоичного кода в аналоговые сигналы с отработкой выходной координаты по известным законам регулирования.
Существуют декодирующие преобразователи «цифровой код-угол поворота (одноканальные и многоканальные) на базе ща-гового следящего привода.
Известные устройства преобразуют двоичный код в пропорциональное зтаачение угла поворота. После подачи на вход преобразуемого кода через время t преобразования на выходе устанавливается соответствующий угол поворота.
Отработка угла поворота происходит равномерно с постоянной скоростью в течение минимально возможного отрез1ка времени прТакие преобразователи могут быть -приметены для отработки управляющих воздействий только при наличии в управляющей системе локальных регуляторов.
Иначе обстоит дело в цифровых управляющих системах, где вычислительный жомплекс осуществляет большое количество алгоритмов управления и не может ограничиться выполнением только алгоритма отработки законов регулирования. Таким образом, применение обычных декодирующих преобразователей для отработки управляющих воздействий на объект связан либо с неоправданно большим расходом машинного времени на воздействие, либо с наличием в системе локальных регуляторов местной автоматики, содержащих в себе большой объем оборудования. Таким образом основным недостатком существующих декодирующих преобразователей «код-угол является отсутствие в самом преобразователе возможности отработки выходной координаты по известным законам регулирования.
Основная цель изобретения заключается в разработке некоторых цифровых узлов дополнительно к известному декодирующему преобразователю «код-угол с тем, чтобы осуществить изменение выходной координаты (угла поворота) согласно уравнению:
о.() /C.AKJ + К, + /Сз X
(гг-1).Г1(
25
(1) (n+)-T,
где ОС (Т)
положение регулирующего органа (исполнительного механизма) , в данном случае выход преобразователя (угол поворота);
- дискретные значейия отклонеиия .регулируемой величины от ее заданного значения в моменты времени IT, 2Т . . . пТ; Т - время одного такта (нериод
квантования);
Ki, K,z, К.г - коэффициенты проиорциональности |каждой составляющей уравнения (I).
Все три составляющие уравнения -и требуемое время интегрирования Т в виде кода лостунают от вычислительного комплекса, который после этого освобождается для выполнения других задач, а преобразователь работает с отработкой выходной координаты (угла) по заданнОМу закону.
Цель изобретения - создание декодирующего преобразователя, который позволяет в процессе преобразования производить изменение выходной координаты (угла поворота вала) при наличии на входе исходных кодовых значений закона движения. Это упрощает всю управляющую систему, так как для некото,рых объектов нет принципиальной надобности при таком способе отработки управляющих воздействий в наличии легальных регуляторов местной автоматики. Это позволяет также существенно повысить производительность вычислительного комплекса при многоканальном цифровом управлении и регулирования технологических процессов. При этом существенно расширяется область применения самого декодирующего преобразователя.
Сущность изобретения заключается в том, что, с целью расширения области применения декодирующего преобразователя «код-угол, осуществления движения выходной координаты (угла поворота) преобразователя в каждом такте преобразования по разным закон,ам регулирования, повышения пропускной опособности вычислительного -комплекса при многоканальном цифровом управлении и регулировании объекта, а также упрощения всей управляющей системы за счет отсутствия части локальных регуляторов местной автоматики, в нем входная преобразуемая кодовая величина a(t) разделяется на три составляющие согласно уравнению (I). Первая из них - пропорциональная составляюп
щая (йтг), вторая - интегральная
составляющая (аи), третья /C3{A «T - -A(n--1)Л} - дифференциальная составляющая движения (ав ) выходной координаты (угла поворота). Кодовые значения этих составляющих, поступившие от вычислительного комплекса записываются в соответствующие регистры. Каждый регистр представляет собой число-импульсный преобразователь параллельного двоичного кода. Развертка процесса преобразования (в каждом такте) производится по времени и по ординате следующим образом: сумма пропорциональной и дифферевциальной составляющей записывается в одном чисяо-импульсном преобразователе, дифференциальная составляющая записывается в другом преобразователе, интегральная составляющая - в третьем преобразователе; время интегрирования, также получаемое в виде кода от вычислительного комплекса, записывается ;в регистр делителя частоты.
Сигналом «пуск начинается преобразование. Вначале производится отработка пропорциональной и дифференциальной составляющей движения вала, отработка суммы этих двух составляющих производится с максимально возможной скоростью (частота /о). Конец преобразования этих составляющих
фиксирует запуск преобразователя, в котором записана дифференциальная составляющая и изменяет состояние триггера знака, следовательно, производится реверсивная отработка дифференциальной составляющей с той же частотой. Конец реверсивного преобразования дифференциальной составляющей ;фиксирует запуск преобразователя и изменение триггера знака. С помощью преобразователя, в котором записана интегральная составляющая,
производится отработка интегральной части преобразования (или движения вала) уже с меньшей скоростью, которая определяется кодовым значением времени интегрирования Гц (т. е. соответствующей частотой fi). Конец отработки интегральной составляющей фиксирует конец данного такта преобразования. Следовательно, сущность изобретения заключается в том, что процесс цифро-аналогового преобразования в каждом такте развертывается по времени и выходной величине таким образом, что выходная координата (угол поворота вала) изменяется по известным законам движения регулирующего органа как это происходит в локальных системах автоматического регулирования.
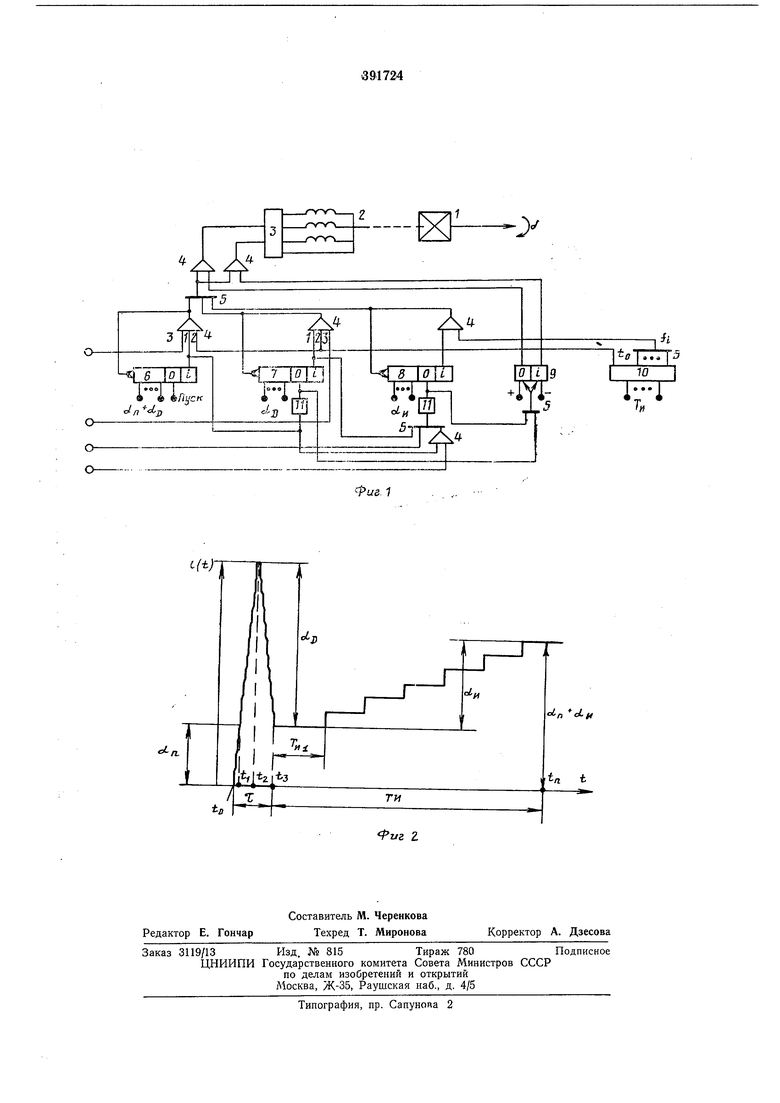
На фиг. 1 изображен предлагаемый декодирующий преобразователь «код-угол ; на фиг. 2 изображен график изменения выходной координаты предлагаемого устройства в функции
времени.
Он содержит редуктор 1, шаговый двигатель 2, кольцевой коммутатор для управления фазовыми обмотками шагового двигателя , схемы , схемы «ИЛИ 5, преобразователи
«код - число импульсов 6, 7, 8, триггер знака Я делитель частоты 10, формирователь П. Первый преобразователь кода 6 производит отработку суммы пропорциональной и дифференциальной частей движения, второй 7
производит реверсивную отработку дифференциальной составляющей движения выходной координаты. Третий 8 производит отработку интегральной составляющей движения. Делитель частоты 10 представляет собой источник
последовательности импульсов для управления преобразователями. Триггер знака 9 определяет направление движения вала. Кроме того, «а чертеже максимальная частота генератора обозначена /о, а произвольная частота на выходе делителя - fj.
На входы устройства подаются сигналы - признаки закона движения.
Устройство работает следующим образом.
Величина преобразуемого кода, разделенная на три составляющие, записывается в трех разных число-импульсных преобразователях, при этом в первом 6 записывается сумма пропорциональной и дифференциальной составляющих ап +ад , во втором 7 - дифференциальная составляющая ад и в третьем 8 - интегральная составляющая оси.
В делителе частоты 10 записывается требуемое значение частоты /г, которым однозначно определяется и требуемое время интегрирования Ги, а в триггере знака 9 - направления вращения. При наличии всех указанных исходных значениях кода сигнало-м «пуск записывается «1 в старщем разряде перво-го преобразователя 6, и шаговый двигатель будет отрабатывать иропорционалъную и дифференциальную составляющие движений с большой частотой /о, соответствующей максимальной частоте данного типа шагового двигателя. В конце отработки этих двух составляющих в результате заполнения счетчика преобразователя 6 и возвращения его старшего разряда в исходное состояние формируется сигнал записи «I в старший разряд второго преобразователя 7 и опрокидывается триггер знака 9.
Таким образом щаговый двигатель начинает реверсивную отработку дифференциальной составляющей движения той же высокой частотой fo. После возвращения старщего разряда счетчика преобразователя 7 в исходное состояние формируется сигнал записи «1 в старший разряд счетчика третьего преобразователя 8 и одновременно производится возвращение триггера зна|Ка в исходное состояние.
Таким образом щаговый двигатель продолжает отработку угла по интегральному зако-ну, так как преобразователь 8 управляется импульсами частоты /, от делителя частоты 10 и значения Суммарное перемещение вала будет Ооответствовать суМ:Ме только двух составляющих движения - пропорциональной и интегральной:
/ir. + /C,iAI/n.
i
В момент (см. фиг. 2) 4 начинается преобразование, т. е. движение выходной координаты. К моменту 1 заканчивается отработка пропорциональной части движения («и) и
сразу начинается отработка дифференциальной составляющей движения (ад ), которая заканчивается « моменту 2- В течение времени (Гз-/2) производится реверсивная отработка диф|ференциальнОй составляющей движения. В момент tz начинается отработка интегральной составляющей движения, которая заканчивается через время
- / f
а - я 3
где tn - момент конца Преобразования. Предмет изобретения
Декодирующее устройство «код-угловое перемещение вала, содержащее редуктор, последовательно соединенный с шаговым двигателем и кольцевым коммутатором, преобразователи кода и триггер знака, отличающееся тем, что, с целью повышения точности, быстродействия и упрощения устройства, в него
введены делитель частоты, формирователи, схемы «И И «ИЛИ, выходы преобразователей кода соединены через соответствующие первую, вторую и третьи схемы «И, последовательно соединенные со схемой «ИЛИ, с
первыми входами четвертой и пятой схем «И, вторые ВХОДЫ которых соединены с выходами триггера знака, а выходы подключены к кольцевому коммутатору, один из входов каждого преобразователя кода соединен с выходом соответствующей схемы «И, вторые входы первой и второй схем «И подключены непосредственно, а второй вход третьей схемы «И - через вторую схему «ИЛИ « делителю частоты, третьи входы первой и второй схем «И
соединены со входами устройства, вторые входы второго и третьего преобразователя кода соединены через третью схему «ИЛИ со входом триггера знака и через формирователи подключены соответственно, к выходу первого
преобразователя кода и к выходу четвертой схемы «ИЛИ, первый вход которой соединен с выходом второго преобразователя кода, второй вход - со входом устройства, а третий- через шестую схему «И соединен с выходом
первого преобразователя кода и со входом устр|0йства.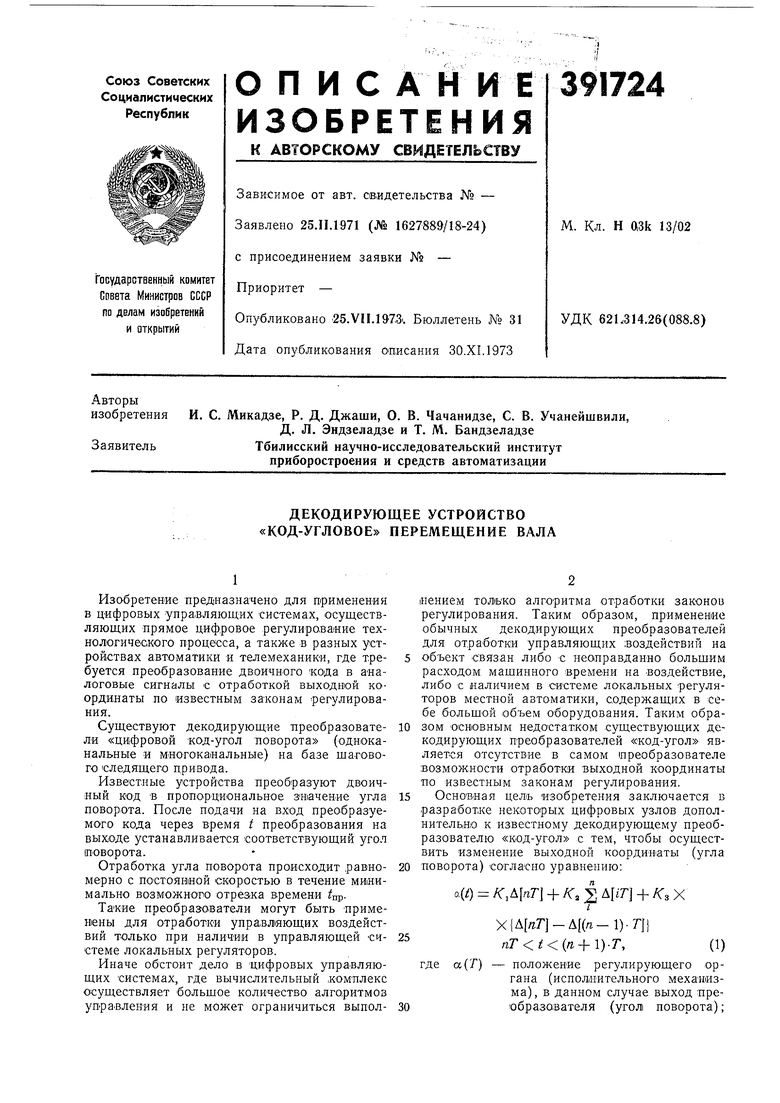

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| ЦИФРОВОЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ С ВОЗДЕЙСТВИЕМ ПО ПРОИЗВОДНОЙ РЕГУЛЯТОР | 1970 |
|
SU259226A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| Устройство для числового программного управления станком | 1978 |
|
SU744465A1 |
| Цифровой регулятор | 1978 |
|
SU911458A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Генератор символов | 1989 |
|
SU1633386A1 |