Изобретение относится к машиностроению, а именно к средствам для контроля кинематической погрешности зубчатых передач.
Цель изобретения - повышение том- нести выделения периодических составляю- uwx кинематической погрешности за счет подавления ошибок квантования углов поворота пача.тьного и конечного звеньев зубчатого механизма при синхронном накоплении.
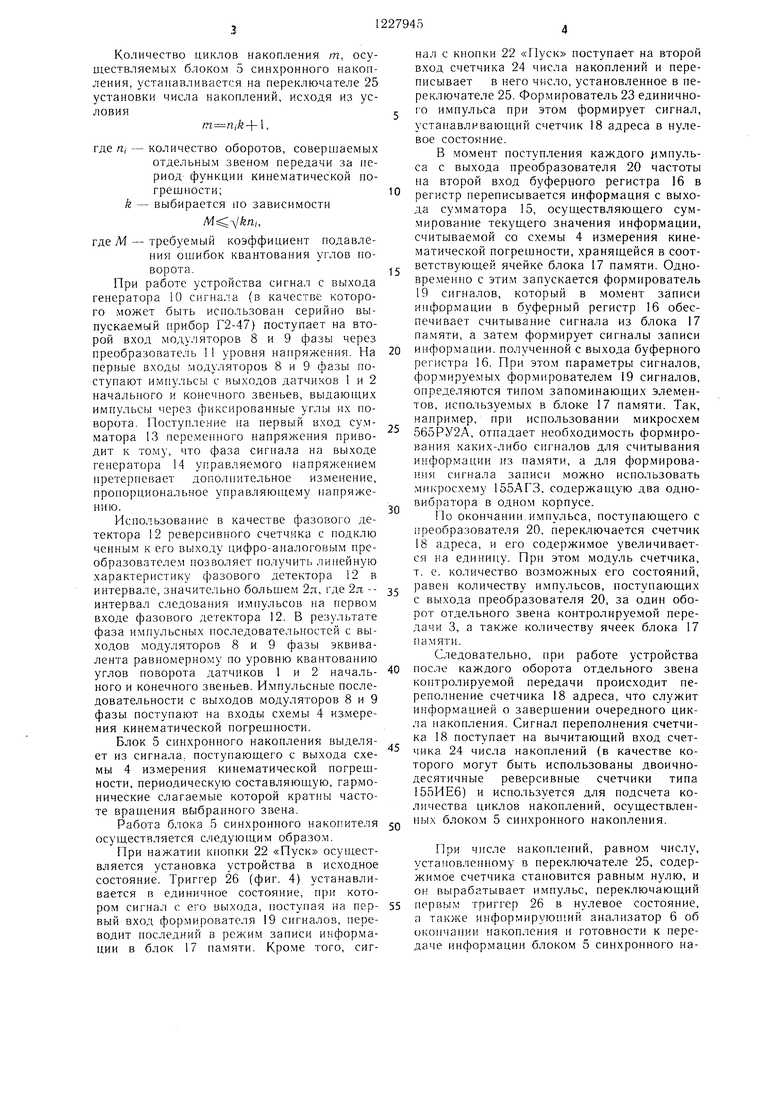
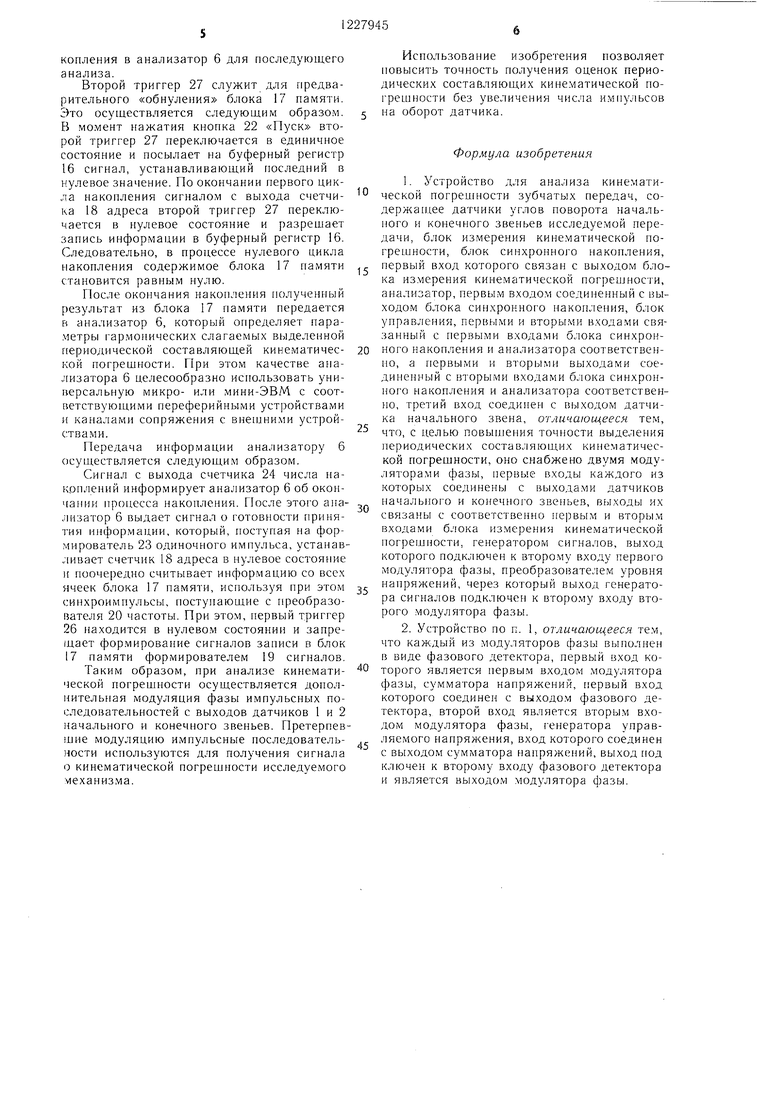
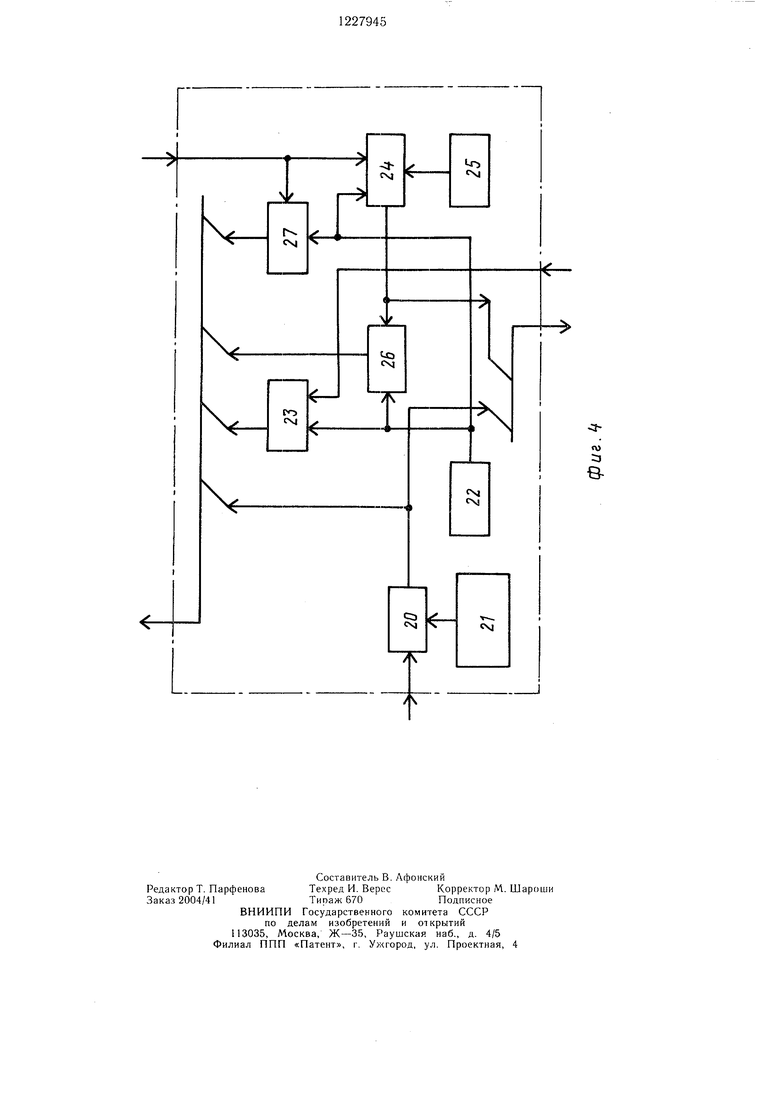
На фиг. 1 изображена блок-схема устройства для анализа кинематической погрешности зубчатых передач; на фиг. 2 - блок- схема модулятора фазы; на фиг. 3 - функциональная схема блока синхронного на- копления; на фиг. 4 - функциональная схема блока управления.
Устройство включает в себя датчики 1 и 2 углов поворота начального и конечного звеньев контролируемой передачи 3 (фиг. 1), блок 4 измерения кинематической погреш- пости, блок 5 синхронного накопления, первый вход которого связан с выходом блока 4 измерепия кинематической ногрешнос- ти, анализатор 6, первым входом соединенный с выходом блока 5 синхронного на- коплепия, блок 7 управ:1ения, первым и вторым входами связанный первыми входами блока о синхронного накопления и анализатора 6 соответственно, а первым и вторым выходами соединенный с вторыми входами блока 5 синхронного накопления и анализа- тора 6 соответственно, третий вход соединен с выходом датчиком 1 начального звена, два модулятора 8 и 9 фазы, первые входы каждого из которых соединены с выходами датчиков 1 и 2 начального и конечного звеньев, выходы их связаны соответ- ствеппо с первым и вторым входами, блока 4 измерения кинематической погрешности, генератор 10 сигналов, выход которого подключен к второму входу первого модулятора 8 фазы, преобразователь 11 уровня напряжений, через который выход генерато- ра 10 сигналов подключен к второму входу второго модулятора 9 фазы.
Каждый из модуляторов 8 (или 9) фазы вынолнен в виде фазового детектора 12 (фиг. 2), первый вход которого является первым входом модулятора 8 (или 9) фазы, сумматора 13 напряжений, первый вход которого соединен с выходом фазового детектора 12, второй вход является вторым входом модулятора 8 (или 9) фазы, генератора 14 управляемого напряжения, вход кото- рого соединен с выходом с.умматора 13 напряжений, выход подключен к второму входу фазового детектора 12 и является выходом модулятора 8 (или 9) фазы. Кроме того, блок 5 синхронного накопления включает в себя сумматор 15 (фиг. 3), первый вход которого является первым входом блока 5 синхронного накопления, буферный регистр 16, первый вход которого соединен
5
0 .
Q 5
с выходом сумматора 15, второй и третий входы являются вторым входом блока 5 синхронного накопления, блок 17 памяти, первым входом подключенный к выходу буферного регистра 16, счетчик 18 адреса, первым и вторым входами соединенный с вторым входом блока 5 синхронного накопления, а выход его соединен с вторым входом блока 17 намяти и является первым выходом блока 5 синхронного накопления, формирователь 19 сигналов, выходом соединенный с третьим входом блока 17 памяти, а первым и вторым входами - с вторым входом блока 5 синхронного накопления, выход блока 17 памяти соединен с вторым входом сумматора 15 и является вторым выходом блока 5 синхронного накопления.
Блок 7 управления включает в себя преобразователь 20 частоты следования импульсов (фиг . 4), первый вход которого является третьим входом блока 7 управле- пия, выход является первым и вторы.м выходами блока 7 управления, блок 2 переключателей установки коэффициентов преобразования соединен с вторым входом преобразователя 20 частоты следования импульсов, кнопку 22 «Пуск, формирователь 23 одиночного импульса, первым входом связанный с выходом кнопки 22 «Пуск, второй вход является вторым входом блока 7 управления, а выход соединен с первым выходом блока 7 управления, счетчик 24 числа накоплений, первый вход которого является первым входом блока 7 управления, второй вход подключен к выходу кнопки 22 «Пуск, переключатель 25 установки числа накоплений, соединенный с третьим входом счетчика 24 числа накоплений. Кроме того, в блок 7 управления входят первый триггер 26, первым входом связанный с выходом кнопки 22 «Пуск, вторым входом - с выходом счетчика 24 числа накоплений, выходом - с первым выходом блока 7 управле1п-1Я, второй триггер 27, первым входом соединенный с кнопкой 22 «Пуск, вторым входом - с первым входом блока 7 управления, а выход нoдкJпoчeн к перво.му выходу блока 7 управления.
Устройство работает следующим образом.
Предварительно с помощью блока 21 переключателей устанавливают коэффициент преобразования интервалов следования импульсов и количество циклов накопления, осуществляемых блоком 5 синхронного накопления.
Коэффицие1гг преобразовапия интервалов следования импульсов с датчика 1 преоб- разователе.м 20 выбирают, например, равным отношению количества оборотов, совершаемых ведущим звеном передачи 3 к количеству оборотов, совершаемых отдельным зве ном передачи за период кинематической погрешности.
Количество циклов накопления т, осуществляемых блоком 5 синхронного накопления, устанавливается на переключателе 25 установки числа накоплений, исходя из условия
,.
где rt, - количество оборотов, совершаемых отдельным звеном передачи за период функции кинематической погрешности;k - выбирается по зависимости
M,kni,
где уМ - требуемый коэффициент подавления ошибок квантования углов поворота.
При работе устройства сигнал с выхода генератора 10 сигнала (в качестве которого может быть использован серийно выпускаемый прибор Г2-47) поступает на второй вход модуляторов 8 и 9 фазы через преобразователь 1 1 уровня напряжения. На первые входы модуляторов 8 и 9 фазы поступают импульсы с выходов датчиков 1 и 2 начального и конечного звеньев, выдающих импульсы через (|1иксированные углы их поворота. Поступление на первый вход су.м- матора 13 переменного напряжения приводит к тому, что фаза сигнала на выходе генератора 14 управляемого напряжением претерпевает дополнительное изменение, пропорциональное управляющему напряжению.
Использование в качестве фазового детектора 12 реверсивного счетчика с подклю ченным к его выходу цифро-аналоговым пре- образователе.м позволяет получить линейную характеристику фазового детектора 12 в интервале, значительно большем 2л, где 2я -- интервал следования импульсов на первом входе фазового детектора 12. В результате фаза импульсных последовательностей с выходов модуляторов 8 и 9 фазы эквивалента равномерному по уровню квантованию углов поворота датчиков 1 и 2 началь- ноге и конечного звеньев. Импульсные последовательности с выходов модуляторов 8 и 9 фазы поступают на входы схе.мы 4 измерения кинематической погрешности.
Блок 5 синхронного накопления выделя- ет из сигнала, поступающего с выхода схемы 4 измерения кинематической погрещ- ности, периодическую составляющую, гармонические слагаемые которой кратны частоте вращения выбранного звена.
Работа блока 5 синхронного накопителя осуществляется следующим образо.м.
При нажатии кнопки 22 «Пуск осуществляется установка устройства в исходное состояние. Триггер 26 (фиг. 4) устанавливается в единичное состояние, при котором сигнал с его выхода, поступая на пер- вый вход фор.мирователя 19 сигналов, переводит последний в режим записи инфор.ма- ции в блок 17 памяти. Кроме того, сигнал с кнопки 22 «Пуск поступает на второй вход счетчика 24 числа накоплений и переписывает в него число,установленное в переключателе 25. Формирователь 23 единичного импульса при этом формирует сигнал, устанавливающий счетчик 18 адреса в нулевое состояние.
В момент поступления каждого 1мпуль- са с выхода преобразователя 20 частоты па второй вход буферного регистра 16 в регистр переписывается информация с выхода сумматора 15, осуществляющего суммирование текущего значения информации, считываемой со схе.мы 4 измерения кинематической погрешности, хранящейся в соответствующей ячейке блока 17 памяти. Одновременно с этим запускается формирователь 19 сигналов, который в момент записи информации в буферный регистр 16 обеспечивает считывание сигнала из блока 17 памяти, а затем формирует сигналы записи информации, полученной с выхода буферного регистра 16. При этом параметры сигналов, формируемых формирователем 19 сигналов, определяются типом запоминающих элементов, используемых в блоке 17 памяти. Так, например, при использовании микросхем 565РУ2А, отпадает необходи.мость формирования каких-либо сигналов для считывания информации из памяти, а для формирования сигнала записи можно использовать микросхему 155АГЗ, содержащую два одно- вибратора в одном корпусе.
1о окончании, импульса, поступающего с преобразователя 20, переключается счетчик 18 адреса, и его содержимое увеличивается на единицу. При этом модуль счетчика, т. е. количество возможных его состояний, равен количеству импульсов, поступающих с выхода преобразователя 20, за один оборот отдельного звена контролируемой передачи 3, а также количеству ячеек блока 17 памяти.
Следовательно, при работе устройства после каждого оборота отдельного звена контролируемой передачи происходит переполнение счетчика 18 адреса, что служит информацией о завершении очередного цикла накопления. Сигнал переполнения счетчика 18 поступает на вычитающий вход счетчика 24 числа накоплений (в качестве которого могут быть использованы двоично- десятичные реверсивные счетчики типа 155ИЕ6) и используется для подсчета количества циклов накоплений, осуществленных блоком 5 синхронного накопления.
При числе накоплений, равном числу, установленному в переключателе 25, содержимое счетчика становится равным нулю, и он вырабатывает импульс, переключающий первым триггер 26 в нулевое состояние, а также информирующий анализатор 6 об окончании накопления и готовности к передаче информации блоком 5 синхронного накопления в анализатор 6 для последующего анализа.
Второй триггер 27 служит для предварительного «обнуления блока 17 памяти. Это осуществляется следующим образом. В момент нажатия кнопка 22 «Пуск второй триггер 27 переключается в единичное состояние и посылает на буферный регистр 16 сигнал, устанавливающий последний в нулевое значение. По окончании первого цикла накопления сигналом с выхода счетчика 18 адреса второй триггер 27 переключается в нулевое состояние и разрещает запись информации в буферный регистр 16. Следовательно, в процессе нулевого цикла накопления содержимое блока 17 памяти становится равным нулю.
После окончания накопления полученный результат из блока 17 памяти передается в анализатор 6, который определяет пара- .метры гар.монических слагаемых выделенной ггериодической составляющей кинематичес- кой погрешности. При этом качестве анализатора 6 целесообразно использовать универсальную микро- или .мини-ЭВМ с соответствующими переферийными устройствами и каналами сопряжения с внешними устройствами.
Передача информации анализатору 6 осуществляется следующим образом.
Сигнал с выхода счетчика 24 числа накоплений информирует анализатор 6 об окончании процесса накопления. После этого ана- лизатор 6 выдает сигнал о готовности принятия информации, который, поступая на формирователь 23 одиночного импульса, устанавливает счетчик 18 адреса в нулевое состояние и поочередно считывает информацию со всех ячеек блока 17 памяти, используя при этом синхроимпульсы, поступающие с гфеобразо- вателя 20 частоты. При этом, первый триггер 26 находится в нулевом состоянии и запрещает формирование сигналов записи в блок 17 памяти формирователем 19 сигналов.
Таким образом, при анализе кинемати- ческой ногрешности осуществляется дополнительная модуляция фазы импульсных последовательностей с выходов датчиков 1 и 2 начального и конечного звеньев. Претерпев щие модуляцию импульсные последователь- ности используются для получения сигнала о кинематической погрешности исследуемого механизма.
Использование изобретения позволяет новысить точность получения оценок периодических составляющих кинематической погрешности без увеличения числа и.мпульсов на оборот датчика.
Формула изобретения
1.Устройство для анализа кинематической погрешности зубчатых передач, со- держандее датчики углов поворота начального и конечного звеньев исследуемой передачи, блок измерения кинематической погрешности, блок синхронного наконления, первый вход которого связан с выходом блока измерения кинематической погрешности, анализатор, первы.м входом соединенный с выходом блока синхронного накопления, блок управления, первыми и вторыми входами связанный с первыми входами блока синхронного накопления и анализатора соответственно, а первыми и вторыми выходами соединенный с вторыми входами блока синхронного накопления и анализатора соответственно, третий вход соединен с выходом датчика начального звена, отличающееся тем, что, с целью повышения точности выделения периодических составляющих кине.матичес- кой погрешности, оно снабжено двумя модуляторами фазы, первые входы каждого из которых соединены с выхода.ми датчиков начального и конечно1-о звеньев, в 11ходы их связаны с соответственно первым и вторы.м входами блока измерения кине.матической погрешности, генератором сигналов, выход которого подключен к второму входу первого модулятора фазы, преобразователем уровня нанряжений, через который выход генератора сигналов подключен к второму входу второго модулятора фазы.
2.Устройство по п. 1, отличающееся тем, что каждый из модуляторов фазы выполнен в виде фазового детектора, первый вход которого является нервы.м входом .модулятора фазы, сумматора напряжений, первый вход которого соединен с выходо.м фазового детектора, второй вход является вторы.м входом модулятора фазы, генератора управляемого напряжения, вход которого соединен с выходом сумматора напряжений, выход под ключен к второму входу фазового детектора и является выходом модулятора фазы.
(риг.2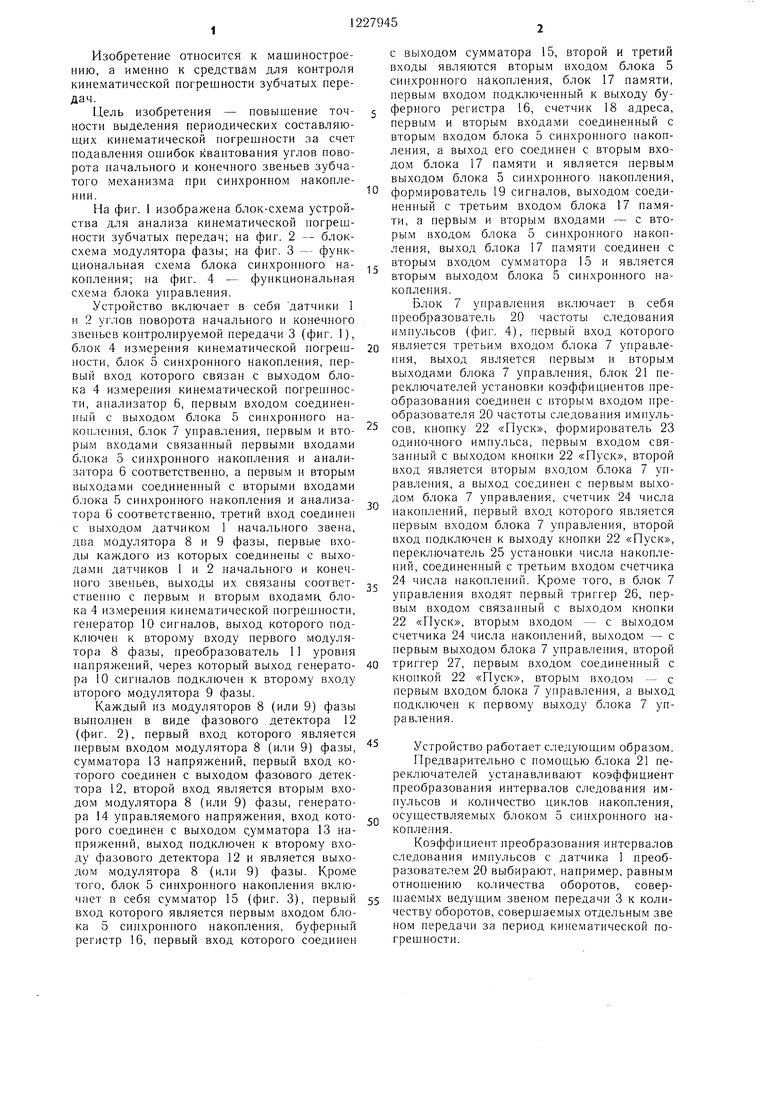
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ анализа кинематической погрешности зубчатых передач | 1980 |
|
SU998852A2 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1116306A1 |
| Преобразователь угла поворота вала в напряжение | 1983 |
|
SU1124360A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| СПОСОБ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ СООБЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2081456C1 |
| Способ анализа кинематической погрешности зубчатых передач | 1979 |
|
SU932215A1 |
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1024699A1 |
| Устройство контроля кинематическойпОгРЕшНОСТи зубчАТыХ пЕРЕдАч | 1979 |
|
SU847009A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
Изобретение относится к машиностроению, а именно к средствам для контроля кинематической погрешности зубчатых передач. Цель изобретения - повышение точности выделения периодических составляю- ших кинематической погрешности за счет подавления ошибок квантования углов поворота начального и конечного звеньев зубчатого механизма при синхронном накоплении. Это достигается за счет введения в устройство двух модуляторов фазы, связанных с датчиками угла поворота начального и конечного звеньев, генератора сигналов и преобразователя уровня напряжений. Таким образом осушествляется дополнительная модуляция фазы импульсных последовательностей с выходов датчиков начального и конечного звеньев контролируемой передачи. Претерпевшие модуляцию импульсные последовательности, используются для получения сигнала о кинематической погрешности контролируемой зубчатой передачи или редуктора. I з.п. ф-лы, 4 ил. 3 (Л to ND СО 4 СЛ
15
/ч 7
:зfO
:з
е
| Способ анализа кинематической погрешности зубчатых передач | 1979 |
|
SU932215A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
