Изобретение относится к техническим измерениям в г ашиностроении, а именно к способам анализа и контроля кинематической погрешности зубчатых передач.
Известен способ анализа кинематической погрешности зубчатых передач, заключающийся в синхронном детектировании сигнала о кинематической погрешности для спектрального анализа функции кинематической погрешности. При этом для повышения точности определения номера и амплитуды гармонических составляющих опорг ный сигнал образуют путем кратного преобразования угла поворота выходного вала контролируемой передачи в частоту переменного напряжения 1.
Наиболее близким к предлагае мому по технической сущности и достигаемому эффекту является способ анализа кинематической погрешности зубчатых передач, заключающийся в том/ что частоту сигнала датчика начального звена исследуемой передачи преобразуют в соответствии с ее передаточным отношением, используют преобразованный сигнал для синхронизации выборок из сигнала о ее кинематической погрешности и определяют параметры гармонических слагаемых кинематической погрешности 2.
OcHOBHfcJM недостатком известных способов является то, что для анализа гармонических составляющих кинематической погрешности с частотами, кратными частотам вращения отдель - ных зубчатых колес, необходимо обрабатывать либо большие массивы дан10ных переменной длины, либо многократ.но обрабатывать массивы данных постоянной длины. Это ведет к снижению производительности и универсальности при определении параметров гармо15нических составляющих с частотами, кратными частотам вращения зубчатых колес., .,
Цель изобретения - расширение функциональных возможностей.
20
Указанная цель достигается тем, что частоту сигнала датчика начального звена преобразуют в соответствии с передаточными отношениями от ведущего звена до отдельных звеньев
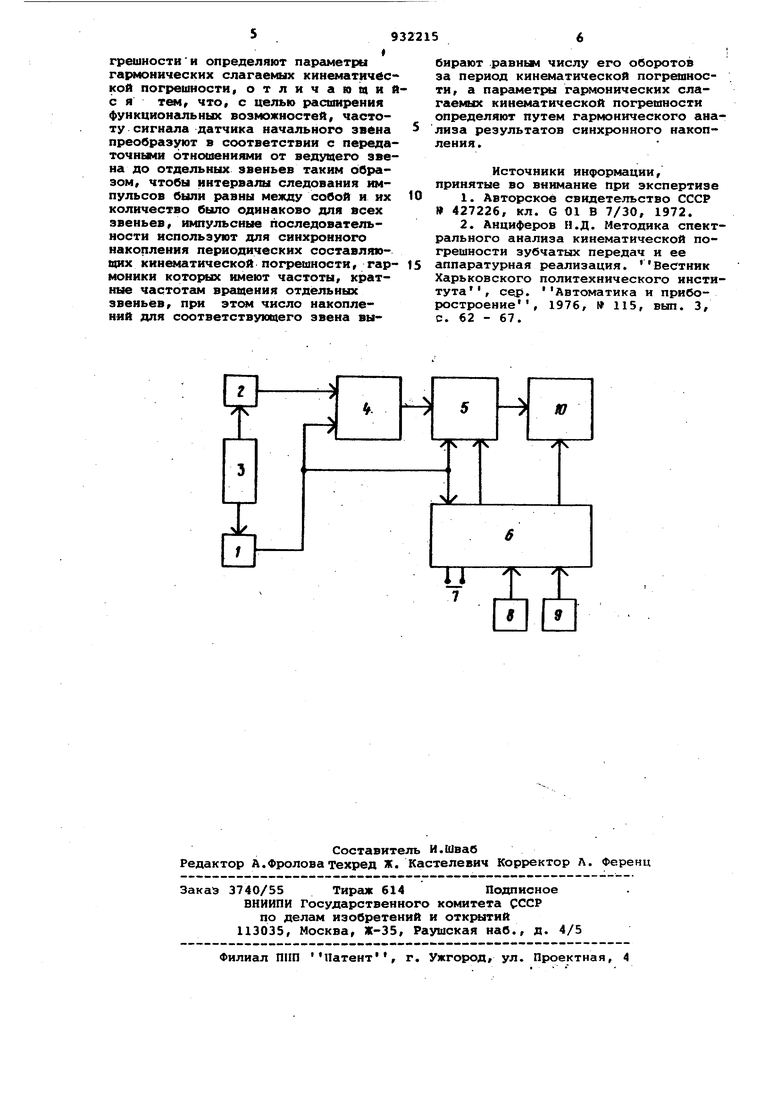
25 таким образом, чтобы интервалы следования импульсов были равны между собой и их количество было одинаково для всех звеньев, импульсные последовательности используют для синхрон30ного накопления периодических соетавляющих кинематической погрешности гармоники которых имеют частоты, кратные частотам вращения отдельных звеньев, причем число накоплений для соответствующего звена выбирают равным числу его оборотов за период кинематич ской погрешности, а параметры гармонических слагаемых кинематической погрешности определяют путем гармонического анализа результатов синхронного накопления, . На чертеже представлена блок-схема устройства, реализующего предлагаемый способ. Устройство включает в себя датчики 1 и 2 углов поворота ведущего и ведомого звеньев исследуемой передачи 3, схему 4 измерения кинематической погрешности,синхронный накопитель 5, блок 6 управления, кнопку 7 пуска, кодирующий переключатель 8 для установки числа оборотов ведущего вала за период функции кинематической погрешности, кодирующий переключатель 9 для уста новки чисел оборотов выбранных звен ев зубчатой передачи за период функ ции кинематической погрешности и блок 10 гармонического анализа. Предлагаемый способ осуществляет ся следующим образом. На кодирующих переключателях 8 и 9 устанавливаются численные значени равные соответственно количеству об ротов, совершаемых ведущим звеном передачи 3 и отдельными звеньями ис следуемой зубчатой передачи на пери функции кинематической погрешности. После нажатия кнопки 7 пуска в синхронный накопитель 5 передается зна чение коэффициента преобразования частоты сигнала импульсного датчика угла поворота ведущего звена 1 гене ратором опорных сигналов накопителя 5,равного где М - число импульсов, выдаваемых датчиком 1 ведущего звена за один оборот; L - число отсчетов, приходящихся на период выделяемо го процесса; п - число оборотов ведущего звена за период функции кинематической погрешност п.- число оборотов i-ro звен за период функции кинематической погрешности, i 1,2, ..., ME- число анализируемых звеньев). Синхронный накопитель 5 выделяет из сигнала, пропорционального функгции кинематической погрешности исследуемого механизма,получаемого с выхода схемы 4 измерения кинематической погрешности и формируемого с использованием сигналов с выходов датчиков 1 и 2 угла поворота ведущего и ведомого звеньев, периодическую составляющую, гармонические слагаемые которой кратны частоте вращения выбранного звена. При этом число накоплений равно , а число оборотов ведущего звена за время выделения одной из периодических составляющих равно п. Блок 6 управления, используя сигнал с выхода датчика 1 ведущего звена, определяет число оборотов, совеЕвиенных ведущим звеном после нажатия кнопки 7 пуска. После того, как оно станет равным п, результат синхронного накопления передается в блок 10 гармонического анализа, которыйопределяет параметры гармонических слагаемых выделенной периодической составляющей функции кинематической погрешности и пе|редает новое значение коэффициента преобразования генератора опорных сигналов синхронного накопителя 5. После этого осуществляется очередной цикл выделения периодической составляющей, гармонические слагаемые которой имеют частоты, кратные частоте вращения следующего звена передачи. Результат накопления, как и прежде, подвергается гармоническому анализу. Аналогичные процедуры повторяются для всех значений п установленных на кодирукмцем переключателе 9., Присутствие в результате синхронного накопления только гармонических слагаемых с частотами, кратными частоте вращения выбранного зубчатого колеса, определяе/гся тем, что при выбраннсш числе суммирований произойдет полная компенсация га{ 1оиических слагаемых, для которых на периоде функции кинематической погрешности укладывается целое число периодов, а на периоде вьзделяемого сигнала - не целое. Таким образом, предлагаемый способ позволяет исследовать параметры гармонических слагаемых кинематической погрешности с частотами, кратными частот 1М вращения отдельных звеньев передачи, и обеспечивает высокую производительность анализа. Формула изобретения Способ анализа кинематической погрешности зубчатых передач, заключаняцийся в том, что частоту сигнала датчика начального звена исследуемой передачи преобразуют в соответствии с ее передаточным отношением, используют преобразованный сигнал для синхронизации выборок из сигнала о ее кинематической погрешностии определяют параметры гармонических слагаемых кииематичбской погрешности, отличающийс я темг что, с целью расширения функциоигшьных возможностей, частоту сигнала датчика начального звена преобразуют в соответствии с передаточными отношениями от ведущего звена до отдельных звеньев таким образом, чтобы интервалы следования импульсов были равны между собой и их количество было одинаково для всех звеньев, импульсные последовательности используют для синхронного накопления периодических составляющих кинематической погрешности, гарМОНИКИ которых имеют частоты, кратные частотгм вргицения отдельных звеньев, при этом число накоплений для соответствующего звена выбирают .равным числу его оборотов за период кинематической погрешности, а паргилетры гармонических слагаемых кинематической погрешности определяют путем гармонического анализа результатов синхронного накопления.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 427226, кл. G 01 В 7/30, 1972.
2.Анциферов П.Д. Методика спектрального анализа кинематической погрешности зубчатых передач и ее
Вестник
аппаратурная реализация.
Харьковского политехнического института ,
Автоматика и прибосер.
ростроение , 1976, 115, вып. 3, с. 62 - 67.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ анализа кинематической погрешности зубчатых передач | 1980 |
|
SU998852A2 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1116306A1 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Устройство для оценки технического состояния механизма с зубчатыми колесами | 1982 |
|
SU1078241A1 |
| Устройство для измерения гармоническихСОСТАВляющиХ КиНЕМАТичЕСКОй пОгРЕшНОСТизубчАТыХ пЕРЕдАч | 1979 |
|
SU815481A1 |
| Способ измерения кинематической погрешности зубчатых передач | 1979 |
|
SU783576A1 |
| Способ сборки зубчатой передачи | 1981 |
|
SU965650A1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Способ коррекции кинематической цепи винторезного станка | 1986 |
|
SU1380913A2 |
