Изобретение относится к техническим измерениям в машиностроении, а именно к способам анализа и контроля кинематической погрешности зубчатых передач..
По основному авт.св. № 932235 известен способ контроля кинематичес. кой погрешности зубчатых передач, заключающийся в том, что частоту сигнала датчика начального звена исследуемой передачи преобразуют в-соответствии с ее передаточным отношением от ведущего до отдельных звеньев таким образом, чтобы интервалы следования импульсов были равны между.собой, испульснЦе последовательности используют Щ1Я синхронного накопления периодическ|1х составляющих кинематической пог ешности, гармоники которых имеют частоты кратные частотам вращения отдельных звеньев, при этом число накоплений для соответствующего звена выбирают равным числу его оборотов за период кинематической погрешности, а параметры гармонических слагаемыхкинематической погрешности определяют путем гармонического анализа результатов синхронного накопления ClJ.
Недостатком известного способа является то, что для достижения максимально возможной производительности анализа требуется одновременное выделение по указанному способу всех периодических составляющих, т.е. необходимо применять параллельную схему обработки, которая не
.всегда удобна, так как приводит к
10 усложнению схемы аппаратурой регшиза.ции. При последовательном выделении периодических составляющих кинематической погрешности время анализа возрастает в количество раз, равное
15 числу выделяемых периодических состав.пяющих.
Цег.ь изобретения - повышение производительности анализа при последовательном выделении периодических
20 составляющих кинематической погрешности.
Указанная цель достигается тем, что выделение периодических составляющих из сигнала о кинематической
25 погрешности производят синхронно с периодом, : оторый они имеют в сиг: нале о кинематической погрешности, и вычитают их из исходного сигнала, а выделение следующей периодической
30 составляющей осуществляют в течение
периода сигнала полученного в результате вычитания ранее выделенных составляющих, причем число циклов накопления равно числу периодов выделяемого сигнала на периоде сигнала, полученного вычитанием из сигнала о кинематической погрешности ранее выделенных периодических составляющих.
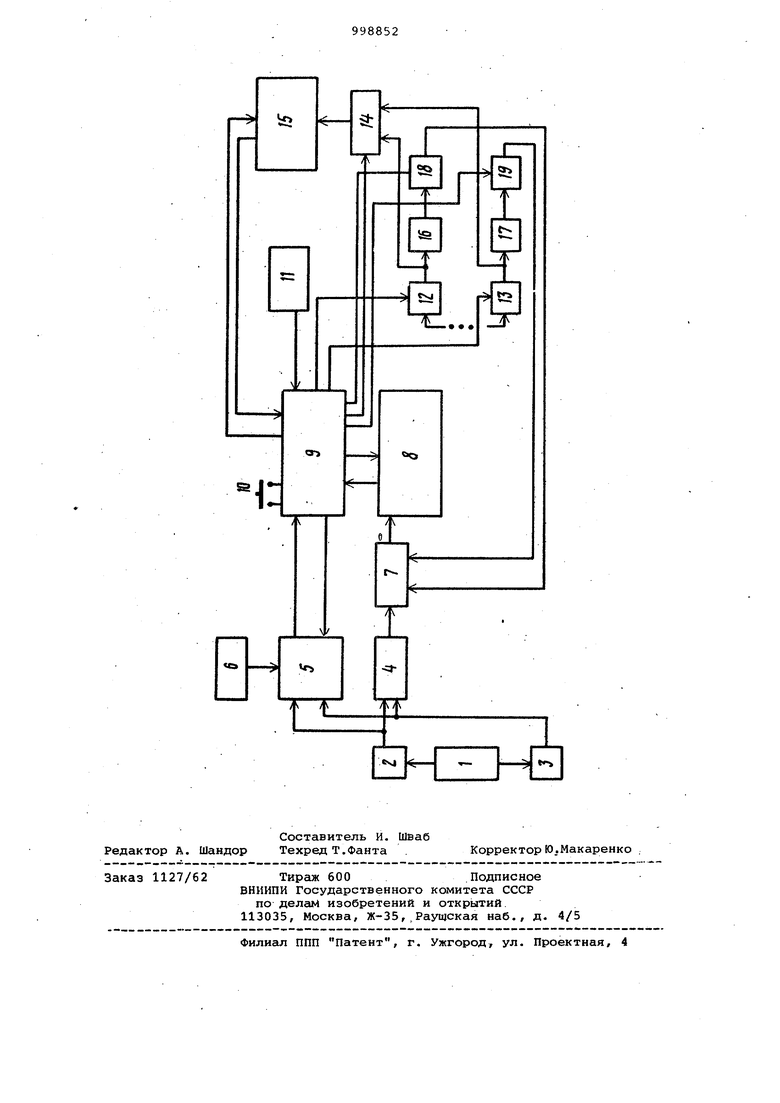
На чертеже представлена блок-схем устройства, реализующего описываемый способ.
Блок-схема содержит исследуемый механизм 1, датчики 2 и 3 углов поворота ведущего и ведомого звеньев ,механизма 1, выходы которых подключены к входам схемы 4 измерения кинематической погрешности и блока 5 синхронизации, соединенного с блоком б установки коэффициентов преобразования частоты следования импульсов с датчиков 2 и 3. К выходу схемы 4 подсоединены сумматор 7, связанный с синхронным накопителем 8, с которым соединены блок 9 управпения с кнопкой 10 пуска, блок 11 задания программы работы блока 9 управления блоками 12 и 13 буферной памяти, коммутатор 14 и анализатор 15 спектра. Входы цифроаналоговых преобразователей 16 и 17 соединены с блоком 12 и 13 буферной памяти, а их выходы через перестраиваемые фильтры 18 и 19 нижних частот подключены к сумматору 7.
Способ осуществляется следующим образом.
При помощи блока 6 установки коэффициентов преоб&азования частоты следования импульсов с датчиков 2 и 3 углов поворота ведущего и ведомого звеньев исследуемого механизма 1 устанавливают такие коэффициенты преобразования частоты входных сигналов, которые обеспечивают фиксированное число импульсов на перио каждой из выделяемых периодических составляющих. В блок 11 задания программу работы блока 9 управления вводится информация о количестве циклов накопления отдельных периодических составляющих и о порядке их выделения. После нажатиякнопки 10. пуска блок 9 управления устанавливает все устройство в исходное состояние. При -этом осуществляется обнуление блоков 12 и 13 буферной
. памяти, подготовка к раьоте синхрон ного накопителя 8 и выбор канала синхронизации, по которому поступаю импульсы от блока 5 синхронизации в блок 9 управления.
Через фиксированный интервал вре мени, после нажатия кнопки 10 пуска достаточный для установки устройств в исходное состояние, блок 9 управления осуществляет запуск синхронного накопителя 8 и блока 5 синхрон
эации. При этом с выходов блока 5 синхронизации начинают поступать импульсы, число которых на г.ериод каждой из выделяемых последовательностей постоянно, а также импульсы, периоды которых равны периодам выделяемых периодических составляющих кинематической погрешности. Причем, в начальный момент времени из блока 5 синхронизации одновременно поступают импульсы как по каналам, по которым импульсы следуют с интервалами, равными периодам выделяемых периодических составляющих, так и по каналам, по которым поступают импульсы, число -которых на период, соответствующий периодической состаляющей постоянно для всех выделяемы периодических составляющих.
По командам блока 9 управления синхронный накопитель 8, используя соответствующие синхронизирующие импульсы, выделяет сначала одну периодическую составляющую в течение периода кинематической погрешности Тд исследуемого механизма 1., на котором укладывается п периодов выделяемой составляющей. При этом на вычитающие входы сумматора 7 с выходов перестраиваемых фильтров 18 и 19 нижних частот поступает нулевое напряжегие. Результат-синхронного накопления записывается в блок 12 буферной памяти.
После этого синхроимпульсы, служившие для выделения этой периодической составляющей, используются для ее -синхронного воспроизведения с помощью цифроаналогового преобразователя 16 и перестраиваемого фильтра 18 нижних частот, который служит для подавления шумов квантования. Частота среза его управляетс блоком 9 управления и изменяется в соответствии с изменением частоты следования синхроимпульсов. Воспроизведение выделенной периодическрй составляющей начинается с поступлением импульса по каналу-, по котором поступали импульсы с интервалом, равным периоду выделенной периодической составляющей.
Сигнал с выхода перестраиваемого фильтра 18 нижних частот поступает на вычитающий вход сумматора 7. При этом на вход синхронного накопителя 8 начинает поступать сигнал о кинематической погрешности, из которого вычтена одна из .его периодических составляющих. Период полученного на выходе сумматора 7 сигнала уменьшится по сравнению с периодом сигнала, который поступает с выхода схемы 4 измерения кинематической погрешнос.Хй. После .этого по приходу импульса по каналу, по которому поступают импул сы с периодом, равном периоду следующе периодической составляющей с использо ванием.синхроимпульсов, число которых на этот период равно, как и для пре дыдущей периодической составляющей, фиксированному числу, по комачдам блока 9 управления в соответствии с программой работы устройства осущес вляется синхронное накопление следующей периодической составляющей кинематической погрешности. При этом период, в течение которого осуществляется накопление, равен периоду сигнала с выхода сумматора 7, а число циклов накопления равно числу периодов В1вделяемой пери одической составляющей на периоде сигнала с выхода сумматора 7. На вычитающие входы сумматора 7, на которые не поступают воспроизводимые периодические составляющие, поступае нулевое напряжение. Результат синхронного накопления записывается в следующую буферную память и служит для воспроизведения выделенной перио дической составляющей с целью ее вычитания из сигнала с выхода схемы 4 измерения кинематической погрешности совместно с ранее выделенной периодической составляющей. В резуль тате этого, сигнал на выходе сумматора 7 будет иметь еще меньший период. Аналогичные операции повторяются с учетом изменения периода сигнала на выходе сумматора 7 до тех пор, по ка не будут выделены все желаемые периодические составляющие. Результаты синхронного накопления, хранящиеся в блоках 12 и 13 буферной памяти через коммутатор 14, управляемый блоком 9 управления, передаются в анализатор 15, осуществляющий гармонический анализ; Блок 9 управления подает команде на работу анализатора 15 спектра, а последний выдарчт сигнал готовности к последующему этапу работы блоку 9 управления. Применение предложенного способа позволяет существенно повысить производительность анализа кинематич ской погрешности при последовательном выделении ее периодических составляющих. Формула изобретения Способ анализа кинематической погрешности зубчатых передач по авт.св. 932235, отличающийся тем, что, с-целью повышения производительности анализа при последовательном выделении периодических составляющих кинематической погрешности, выйеление периодйчес- ких составляющих из сигналов о кинематической погрешности воспроизводят синхронно с периоде, йоторый они имеют в сигнале о кинематической погрешности, и вычитают их из исходного сигнала, а выделение следующей периодической составляющей осуществляют в течение периода сигнала, полученного в результате вычитания ранее выделенных составляющих, причем число циклов накопления равгно числу периодов.выделяемого сигнала на периоде сигнала, полученного вычитанием из сигнала о кинематической . погрешности ранее выделенных периодических составляющих. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 932215, кл. G01 В 7/28, 1979 , (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1116306A1 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Способ анализа кинематической погрешности зубчатых передач | 1979 |
|
SU932215A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЫСТРОЙ СИНХРОНИЗАЦИИ В СИСТЕМАХ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1989 |
|
SU1841074A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Устройство для оценки технического состояния механизма с зубчатыми колесами | 1982 |
|
SU1078241A1 |
| Способ измерения среднеквадратических значений переменных сигналов | 1990 |
|
SU1798705A1 |
| ЦИФРОВОЙ ДАЛЬНОМЕР | 1992 |
|
RU2069003C1 |
| Устройство для регистрации и передачи информации для сосредоточенных объектов | 1980 |
|
SU883950A1 |
| Синхронный фильтр | 1983 |
|
SU1131028A1 |