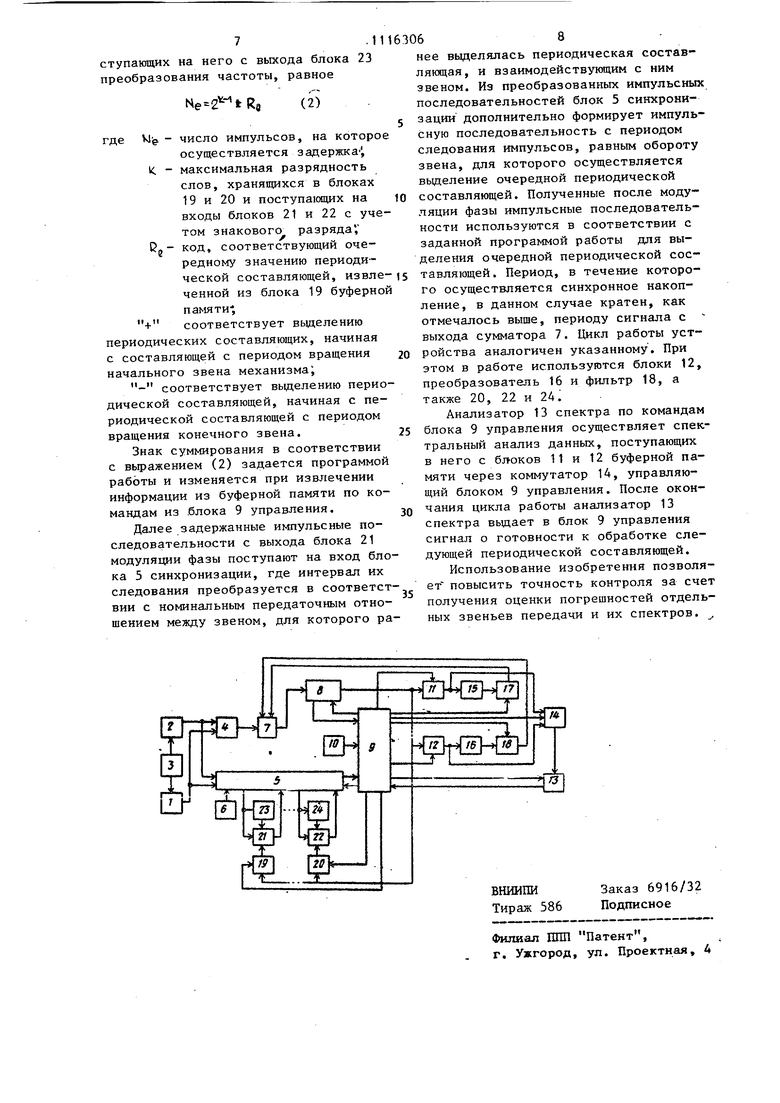
41 Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес. Известно устройство для контроля кинематической погрешности зубчатых передач, содержащее датчики углов поворота, устанавливаемые на ведущем и ведомом звеньях исследуемого механизма, связанные со схемой измерения кинематической погрешности, синхронньй накопитель, связанный со схемой контроля, выход которого соединен с входом блока гармонического анализа, блок управления, связанный с датчиком начального звена, синхронным накопителем и блоком гармонического анализа, а также кодирующие переключатели, связанные с блоком управления СП. Недостатком этого устройства является то, что при параллельном выделении отдельных периодических составляющих кинематической погрешности существенно возрастают аппаратурные затраты, а при последовательном анализе возрастает время, необходимое на вьщеление отдельных составляющих кинематической погрешности. Наиболее близким к изобретению по технической сущности является устройство для контроля кинематической погрешности зубчатых передач, сфдержащее датчики угла поворота ведущего и ведомого звеньев механизма, подключенные к ич выходам блок измерения кинематической погрешности и блок синхронизации, блок установки козффи, циентов преобразования ча-стоты следования импульсов с датчиков угла поворота, подключенный к входу блока синхронизации, сумматор, один из входов которого подсоеди1 ен к выходу блока измерения кинематической погрешности синхронньм накопитель, вход которого соединен с выходом суг-отатора, блок управления, соединенный с синхронным накопителем, блок задания программы работ блока управления, подключенный к входу блока управления, два блока буферной памяти, информационные входы каждого из которых соединены с выходом синхронного накопителя, а входы управления связаны с блоком управления, анализатор спектра, соединенный с выходом блока управления, выходы блоков буферной памяти через коммутатор соединены с входом анализатора спектра, цифр нал о г оные преобразователи, яхолы котс:рьгх соединены с выхо62дами блоков буферной памяти, а выходы через перенастраиваемые фильтры нижних частот, связанные с блоком управления, подключены к входам сумматора С27. Недостатком указанного устройства является то, что при преобразовании частоты следования импульсов с датчиков в соответствии с номинальными передаточными отношениями отдельных ступеней передачи не учитываются мгновенные значения передаточных отношений, отличающиеся от номинальных из-за погрешностей отдельных звеньев кинематической цепи исследуемой персдачи. В результате преобразования интервалов следования импульсов последние в полученной последовательности следуют не через постоянные значения угла поворота соответствующего звена, а отклоняются от них на величины, пропорциональные кинематической погрешности участка цепи передачи, являющегося ведущим для звена, периодическую составляющую с периодом вращения которого вьщеляют. Это ведет к тому, что при получении оценок погрешностей отдельных звеньев передачи не уг}ить ваются гармоники, появление которых вызвано модуляцией фазы этих погрешностей дополнительной неравномерностью вращения из-за погрешности участка цепи передачи, служащего приводом для выбранного звена. В результате снижается точность получения оценок погрешностей отдельных звеньев передачи и их спектров. Цель изобретения - повышение точности контроля за счет получения оценок погрешностей отдельных звеньев передачи и их спектров. Цель достигается тем, что устройство- для контроля кинематической погрешности зубчатых передач, содержащее датчики угла поворота ведуи(его и ведомогй звеньев механизма, подключенные к их выходам блок измсфсния кинематической погрешности и блок синхронизации, блок установки копффициентов преобразования частоты следования импульсов с датчикон угла поворота, подключенный к входу блока синхронизации, сумматор, один из нходоя которого подсоединен к nnxo,4v Гшпка измерения кинематической nor-j/eiiincKTn, синхронный накопитель, пхол кот(1)01Ч1 соединен с выходом сумматора, блчк управления, соединенн1-. с :иlIxp( накопителем, блок задания программы работ блока управления, подключенный к входу блока управления, два блока буферной памяти, информационные входы каждого из которых соединены с выходом синхронного накопителя, а входы управления связаны с блоком управления, анализатор спектра, соединенный с выходом блока управления, выходы блоков буферной памяти через коммута тор соединены с входом анализатора спектра, цифроаналоговые преобразователи, входы которых соединены с вы ходами блоков буферной памяти, а выходы через перенастраиваемые фильтры нижних частот, связанные с блоком управления, подключены к входам сумматора, снабжено третьим и четвертым блоками буферной памяти, информацион ные входы каждого из которых соедине ны с синхронным накопителем, а входы управления - с блоком управления, двумя блоками модуляции фазы, входы которых соед11нены соответственно с выходами третьего и четвертого блоков буферной памяти и блока синхронизации, а выходы соединены с входами блока синхронизации, двумя блоками преобра зования частоты, вход каждого из которых соединен с выходом блока синхронизации, соединенного с входом бло ка модуляции фазы, а один из входов блоков модуляции фазы соединен с выходом блока преобразования частоты. На чертеже изображена структурная схема устройства для контроля кинематической погрешности передач. Устройство включает в себя датчик 1 и 2 угла поворота ведущего и ведомого звеньев механизма 3, подключенные к их выходам блок 4 измерения ки нематической погрешности и блок 5 синхронизации, блок 6 установки коэф фициентов преобразования частоты еле дования импульсов о датчиков угла поворота, подключенный к входу блока 5 синхронизации, сумматор 7, один из входов которого подсоединен к выходу блока 4 измерения кинематической погрешности, синхронный накопитель 8, вход которого соединен с выходом сумматора 7, блок 9 управления, соед ненный с синхронным накопителем 8 и блоком 5 синхронизации-, блок 10 задания программы работ блока 9 управления, подключенный к входу блока 9 управления, два блока 11 и 12 буферной памяти, информационные входы каждого из которых соединены с выкодом синхронного накопителя 8, а j входы управления связаны с блоком 9 управления, анализатор 13 спектра, соединенный с выходом блока 9 управления, выходы блоков 11 и 12 буферной памяти через коммутатор 14 соединены с входом анализатора 13 спектра, цифроаналоговые преобразователи 15 и 16, входы которых соединены с выходами блоков 11 и 12 буферной памяти, а выходы через перенастраиваемые фильтры 17 и 18 нижних частот, связанные с блоком 9 управления, подключены к входам сумматора 7. Кроме того, устройство включает в себя третий и четвертьй блоки 19 и 20 буферной памяти, информационные входы каждого из которых соединены с синхронным.накопителем 8, а входы управления - с блоком 9 управления, два блока 21 и 22 модуляции фазы, входы которых соединены соответственно с выходами третьего и четвертого блоков 19 и 20 буферной памяти и блока 5 синхронизации, а выходы соединены с входами блоков 23,и 24 преобразования частоты, вход каждого из которых соединен с выходом блока 5 синхронизации, соединенного с входом блока 22 модуляции фазы, а один из входов блоков 21 и 22 модуляции фазы соединен соответственно с выходом блоков 23 и 24 преобразования частоты. - Устройство работает следующим образом. Предварительно в блоке 6 устанавливают коэффициенты преобразования интервалов следования импульсов блоком 5 синхронизации, соответствующие отношению номинальных скоростей вращения отдельных звеньев исследуемого механизма 3. В блок 10 задания программы работы блока 9 управления вво- , дится информация о последовательности выделения периодических составляющих кинематической погрешности. После включения устройства осуществляется цикл установки его в исходное состояние по командам блока 9 управления. При этом осуществляется обг уление блоков 11, 12, 19 и 20 буферной памяти, подготовка к работе синхронного накопителя 8 и анализатора 13 спектра, выбор канала синхронизации блока 5 синхронизации. После выработки блоком 9 управления сигнала о готовности к работе устройства переводится в рлбомее состояние. S1 синхронизации формиПри этом блок рует сигнал с выхода датчиков 1 или 2 угла поворота в импульсные последо вательности, интервалы следования которых соответствуют фиксированному значению угла поворота соответствующего звена а также в импульсные пос ледовательности, в которых импульсы следуют через обсфот соответствующег звена, которые по команде блока 9 в соответствии с программой работы, задаваемой блоком 10 задания програм мы работ, передает через блок 6 в синхронный накопитель 8. Блок 4 изме рения кинематической погрешности по сигналам с выходов датчиков 2 и 1 формирует сигнал о кинематической погрешности исследуемого механизма 3, которьй через сумматор 7 поступает на вход синхронного накопителя 8. На другие входы сумматора на первом этапе работы устройства с выходов перестраиваемых фильтров 17 и 18 нижних частот поступают нулевые напряжения, преобразованные в аналоговое напряжение цифроансьлоговыми преобразователями 15 и 16, из нулевых кодов,поступающих с блоков 11 и 12 буферной памяти. Синхронный накопитель 8 по командам блока 9 управления в соответстви с программой работы, задаваемой блоком 10 задания программы работы, осу ществляет синхронное накопление пери одической- составляющей с периодом вращения начального или конечного звеньев механизма 3 из сигнала с выхода сумматора 7, для чего использует соответствующие импульсные последовательности с выхода блока 5 синхронизации, поступающие.в него через блок 9 управления. Результат синхрон ного накопления по команде блока 9 управления в соответствии с заданной блоком 10 программой делится на число циклов накопления за период накоп ления, кратный периоду сигнала с выхода сумматора 7, а результат перепи сьгеается в блок 11 буферной памяти. Затем результат накопления делится на число, равное числу оборотов ведо мого звена механизма 3 за тот же период накопления, а результат переписывается в блок 19 буферной памяти, Запись осуществляется по командам блока 9 управления. После этого в соответствии с программой работы устройство переходит к вьзделению следующей периодической составляющей из
Блок 21 модуляции фазы осуществляет задержку импульсов импульсной последовательности, поступающей на его вход и служащей для вызова из блока 19 буферной памяти хранящейся в ней информации по командам блока 9 управления, на число импульсов, по6сигнала с выхода сумматора 7, При этом импульсные последовательности, служащие для выделения ранее полученной периодической составляющей, используются для воспроизведения по командам блока 9 управления результатов, хранящихся в блоках 11 и 19 буферной памяти. Импульсные последовательности, интервал следования импульсов которых равен фиксированному углу поворота звена, периодическая составляющая с периодом вращения которого выделялась ранее, с выхода блока 5 синхронизации по команде блока 9 управления начинают поступать на входы блока 21 модуляции фазы и вход блока 23 преобразования частоты. При этом коды из блока 11 буферной памяти поступают на входы цифроаналогового преобразователя 15 и преобразуются в электрический сигнал. Сигнал с выхода цифроаналогового преобразователя поступает на вход перестраиваемого фильтра 17 нижних частот, с выхода которого отфильтрованный сигнал поступает на один из входов сумматора 7, где он вычитается из сигнала с выхода блока 4 измерения кинематической погрешности. Перестраиваемый фильтр нижних частот служит для подавления щумов квантования сигнала с выхода цифроаналогового преобразователя. Частота среза его, пропорциональная частоте вращения соответствующего звена механизма, задается блоком 9 управления. Блок 23 преобразования частоты умножает частоту следования импульсов, поступающих на его вход, на величину, равную где Aif(j - интервал следования импульСОВ синхронизации в единицах угла поворота; йфр- величина младшего разряда информации, хранящейся в блоках 19 и 20, в единицах угла поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ анализа кинематической погрешности зубчатых передач | 1980 |
|
SU998852A2 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Устройство для оценки технического состояния механизма с зубчатыми колесами | 1982 |
|
SU1078241A1 |
| Способ анализа кинематической погрешности зубчатых передач | 1979 |
|
SU932215A1 |
| РАДИОМОДЕМ | 2010 |
|
RU2460215C1 |
| Декодирующее устройство | 1985 |
|
SU1339894A1 |
| Цифровой анализатор спектра | 1979 |
|
SU798615A1 |
| СИСТЕМА ЛОКАЛЬНОЙ АВАРИЙНОЙ СВЯЗИ | 1997 |
|
RU2107996C1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1991 |
|
RU2037190C1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТЫХ ПЕРЕДАЧ, содержащее датчики угла поворота ведущего и ведомого звеньев механизма, подключенные к их выходам блок измерения кинематической погрешности и блок синхронизации, блок установки коэффициентов преобразования частоты следования импульсов с датчиков угла поворота, подключенный к входу блока синхронизации, сумматор, один из входов которого подсоединен к выходу блока измерения кинематичЬской погрешности, синхронный накопитель, вход которого соединен с выходом сумматора, блок управления, соединенный с синхронным накопителем, блок задания программы работ блока управления, подключенный к входу блока управления, два блока буферной памяти, информационные входы каждого из которых соединены с выходом синхронного накопителя, a входы управления связаны с блоком управления, анализатор спектра, соединенный с сыходом блока управления, выходы блоков буферной памяти через коммутатор соединены с входом анализатора спектра, цифроаналоговые преобразователи, входы которых соединены с выходами блоков буферной памяти, a выходы через перенастраиваемые фильтры нижних частот, связанные с блоком управления, подключены к входам сумматора, отличающееся тем, что, с целью повьшения точности контроля за счет получения оценок погрешностей (Л отдельных звеньев передачи и их спектров, оно снабжено третьим и четвертым блоками буферной памяти, информационные входы каждого из которых соединены с синхронным накопителем, a входы управления - с блоком управления, двумя блоками модуляции фазы, входы которых соединены соответственно с выходами третьего и четвертого блоков Од буферной памяти и блока синхронизации, СО a выходы соединены с входами блока о в синхронизации, двумя блоками преобразования частоты, вход каждого из которых соединен с выходом блока синхронизации, соединенного с входом блока модуляции фазы, a один из входов блоков модуляции фазы соединен с выходом блока преобразования частоты
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ анализа кинематической погрешности зубчатых передач | 1979 |
|
SU932215A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ анализа кинематической погрешности зубчатых передач | 1980 |
|
SU998852A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
