«
Изобретение относится к мшаино- строению в частности к промшиленным роботам с пневмоприводом, и может найти применение в автоматических линиях и комплексах дпя загрузки штучных заготовок в рабочую зону технологического оборудования, и выгрузки их, а также для автоматизации, сборочных операций.
Цель изобретения снижение мощности привода и повышение долговечности руки за счет снижения сил трения между направляющей и ползушкой, а также повышение быстродействия ру- ки путем приближения закона перемещения ползушки к синусоидальному за счет обеспечения более равномерной нагрузки на приводе.
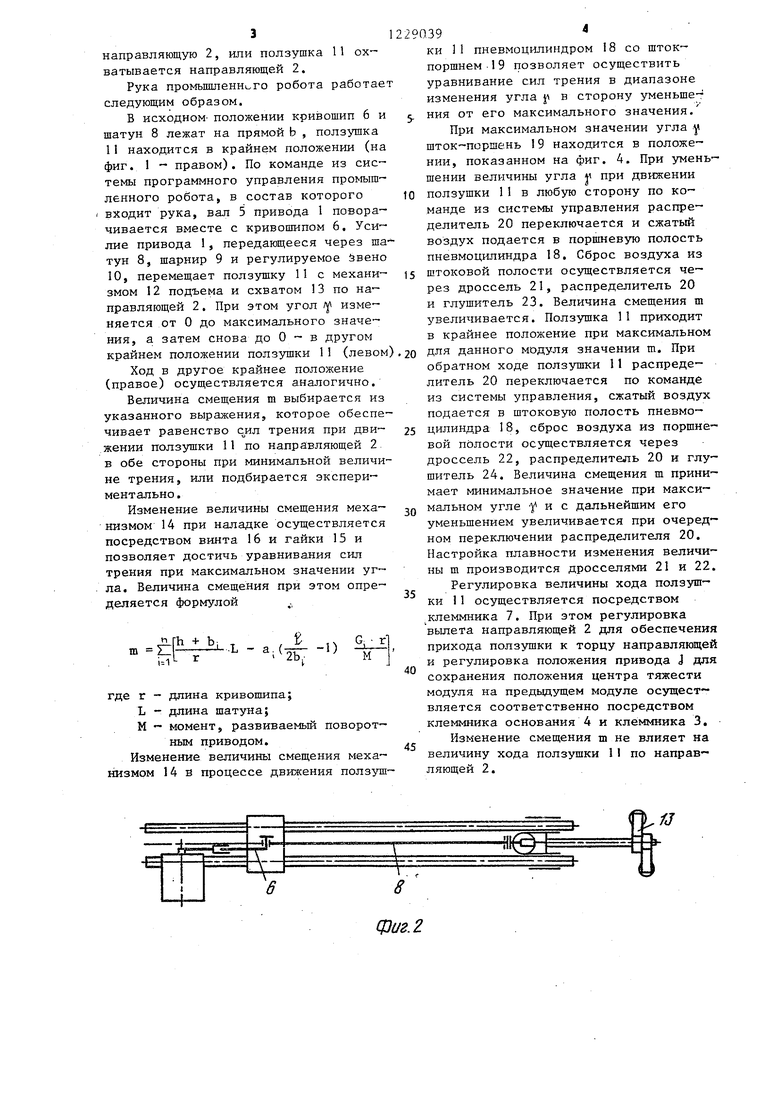
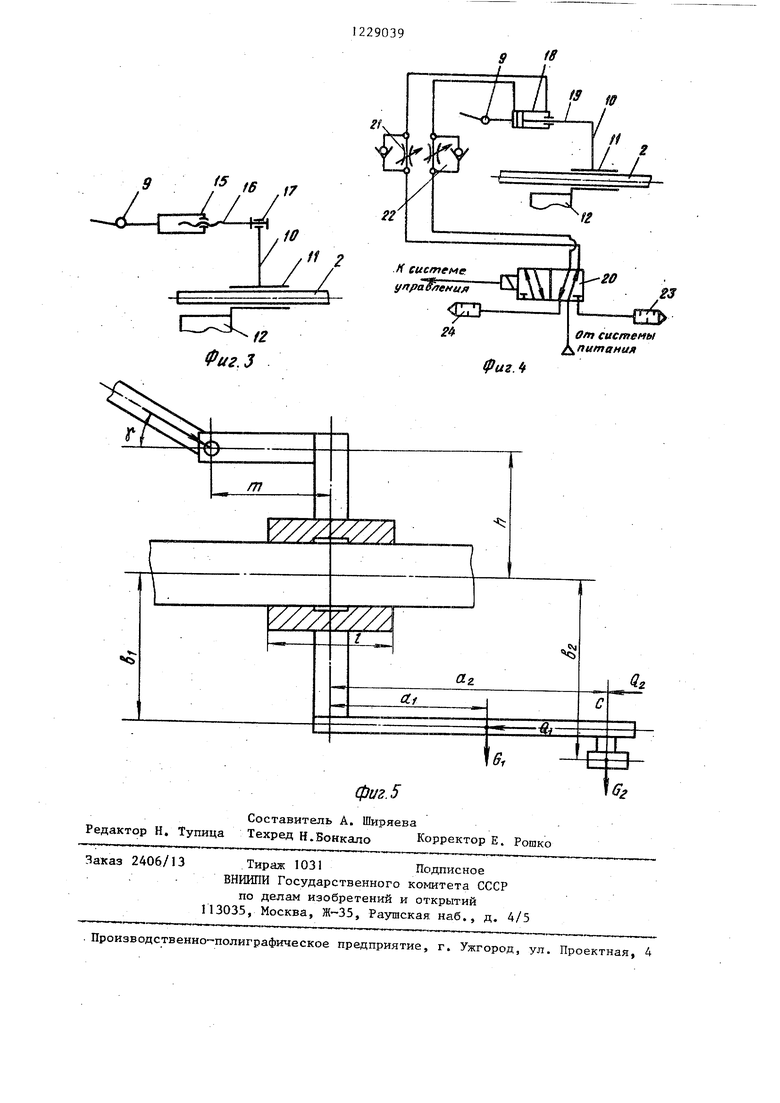
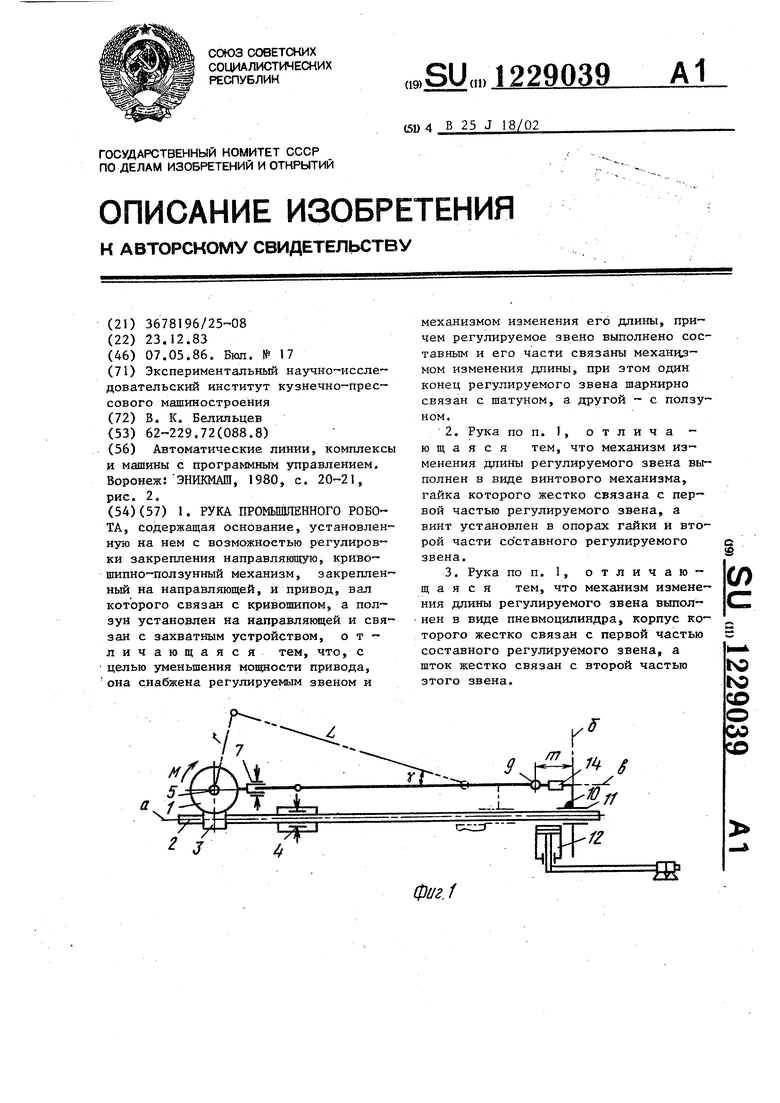
На фиг, 1 показана кинематическая схема руки промыпшенного робота} на фиг. 2 то же, вид сверху;-на фиг. 3 схема механизма изменения длины регулируемого звена; на фиг. 4 схема управляемого в процессе хода ползушки механизма изменения длины регулируемого звена, вариант выполнения; на фиг. 5 расчетная схема сил, действующих на ползушку.
.Рука промьшшенного робота содержит поворотный привод I с углом поворота 80 дпя аксиального кривошип но-ползунного механизма, размещенный на направляющей 2 посредством клег-г- мника 3 с возможностью регулировки его положения вдоль направляющей 2, Направляющая 2 закреплена на основа- нии 4 также с возможностью регулировочного перемещения вдоль своей оси Q . Вал 5 привода 1 соединен с кривошипом 6j выполненным с возмож™ ностью изменения длины посредством клеммника 7, Кривошип 6 шарнирно соединен с шатуном 8, который через шарнир 9 связан с регулируемым звеном 10..
Регулируемое звено 10 соедин:ено с ползушкой 11, на которой закреплен механизм 12 подъема со схватом 13, Ползушка 1i установлена на направляющей 2 с возможностью перемещения вдоль ее оси а.
Шарнир 9 смещен относительно оси симметрии S ползушки 11 вдоль прямой fe , параллельной оси о. направляющей 2, по направлению к валу 5 привода 1.
Механизм 12 подъема также смещен относительно оси симметрии ё ползуш290392
ки 1 по направлению к валу 5 привода I ,
Мелоду шарниром 9 и регулируемым звеном 10 размещен механизм 14 изме- 3 нения длины регулируемого звена 10.
Механизм 14 изменения длины может быть выполнен в виде гайки 15, соединенной с шарниром 9 5 и винта 16, установленного на звене 10 посредством (О упорного подшипника 17,
Механизм I4 изменения длины также . может быть выполнен в виде пневмоци- линдра 18, корпус которого соединен с шарниром 9з а шток-поршень 19- свя- В зал с регулируемым звеном 10.
Полости пневмоцилиндра 18.соединены через распределитель 20, дроссели 21 и 22 с системой питания про- Фшитенного робота, в состав которого 20 входит предлагаемая рука промышпен- ного робота. Распределитель 20 управляется системой программного управления робота (не показана). Выхлопные кангшы распределителя 20 соединены с 25 глушителями 23 и 24.
Величина смещения m шарнира 9 относительно оси симметрии $ ползушки 1 приближенно может быть определена из выражения
- О р- P- sinyJ
где h - расстояние от шарнира до
оси направляющей; а. расстояние от центра тяжести i-массы, установленной на ползушке, о оси симметрии ползушки;
bj - расстояние, от центра тяжести 1 массы, установленной на ползушке, до оси направляющей ;
L - длина ползушки;- G - вес i-массы, установленной
на ползушке;
I - усршие, действующее от привода на шарнир;
if - угол между направлением силы Р и прямой,параллельной оси направляющей; ti число масс, установленных
на ползушке.
Данное выражение следует из усло- ВИЯ равенства сил трения при движении ползушки 1 1 по направляю цей 2 в обе стороны и не зависит от того, выполнена ползушка 11 охватывающей
3
направляющую 2, или ползушка И охватывается направляющей 2.
Рука промышленн1 го робота работае следующим образом.
В исходном- положении кривошип 6 и шатун 8 лежат на прямой b , ползушка 11 находится в крайнем положении (на фиг. 1 правом). По команде из системы программного управления промышленного робота, в состав которого входит рука, вал 5 привода 1 поворачивается вместе с кривошипом 6. Усилие привода 1, передающееся через шатун 8, шарнир 9 и регулируемое 5вено 10, перемещает ползушку 11 с механизмом 12 подъема и схватом 13 по направляющей 2. При этом угол If изменяется от О до максимального значения, а затем снова до О - в другом крайнем положении полззтпки 11 (левом
Ход в другое крайнее положение (правое) осуществляется аналогично.
Величина смещения m выбирается из указанного выражения, которое обеспечивает равенство трения при движении ползушки 11 по направляющей 2 в обе стороны при минимальной величине трения, или подбирается экспериментально .
Изменение величины смещения механизмом 14 при наладке осуществляется посредством винта 16 и гайки 15 и позволяет достичь уравнивания сил трения при максимальном значении угла. Величина смещения при этом определяется формулой
h + b,
-L - a. (
2b.
-1)
где r - длина кривошипа; L - длина шатуна; M момент, развиваемый поворотным приводом.
Изменение величины смещения механизмом 14 в процессе движения ползуш290,39
ки 11 пневмоцилиндром 18 со шток- поршнем 1 9 позволяет осуществить уравнивание сил трения в диапазоне изменения угла ji в сторону уменьшес ния от его максимального значения/ При максимальном значении угла у шток-поршень I9 находится в положении, показанном на фиг. 4. При уменьшении величины угла у при движении
10 ползушки 11 в любую сторону по команде из системы управления распределитель 20 переключается и сжатый воздух подается в поршневую полость пневмоцилиндра 18. Сброс воздуха из
15 штоковой полости осуществляется через дроссель 21, распределитель 20 и глушитель 23. Величина смещения m увеличивается. Ползушка И приходит в крайнее положение при максимальном 20 для данного модуля значении т. При обратном ходе ползушки 11 распределитель 20 переключается по команде из системы управления, сжатый воздух подается в штоковую полость пневмо-
25 цилиндра 18, сброс воздуха из поршневой полости осуществляется через дроссель 22, распределитель 20 и глушитель 24. Величина смещения m принимает минимальное значение при макси-
2Q мальном угле f и с дальнейшим его
уменьшением увеличивается при очередном переключении распределителя 20. Настройка плавности изменения величины m производится дросселями 21 и 22. Регулировка величины хода ползуш- ки 11 осуществляется посредством клеммника 7. При этом регулировка вьшета направляющей 2 для обеспечения прихода ползушки к торцу направляющей и регулировка положения привода j для сохранения положения центра тяжести модуля на предыдущем модуле осущест вляется соответственно посредством клеммника основания 4 и клеммника 3. Изменение смещения m не влияет на величину хода ползушки 1I по направляющей 2.
5
40
5
фиг. 2
Фиг.З
фиг л
Сл
от системы питания
22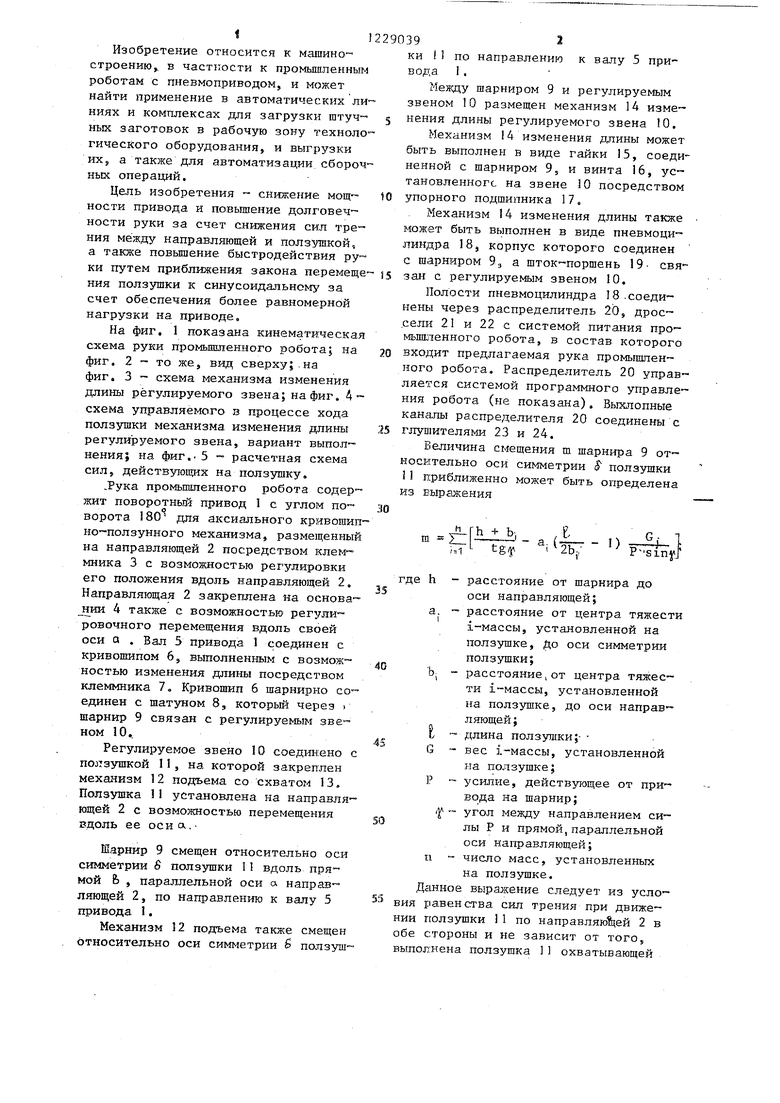
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
| Устройство для равнения кромки ленточного материала | 1989 |
|
SU1728107A1 |
| Ползун зубошлифовального станка | 1985 |
|
SU1463407A1 |
| Привод исполнительных механизмов штамповочных автоматов | 1986 |
|
SU1398964A1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| СИММЕТРИЧНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА | 2014 |
|
RU2568159C2 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2020 |
|
RU2739104C1 |
| Автоматизированный комплекс горячей штамповки | 1988 |
|
SU1602602A1 |
| УСТРОЙСТВО ДЛЯ РАВНЕНИЯ КРОМКИ РУЛОННОГО МАТЕРИАЛА | 1994 |
|
RU2078732C1 |
У тТТ//.
аг
и.
LSL6.
Составитель А. Ширяева Редактор Н, Тупица Техред Н.Бонкало Корректор Б. Рошко
2406/13
Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская: наб., д, 4/5
. Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиг. 5
GZ
| Автоматические линии, комплексы и машины с программным управлением | |||
| Воронеж: ЗНИКМАШ, 1980, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
