Изобретение относится к машиностроению и служит для автоматизации вспомогательных процессов, а именно загрузки и выгрузки деталей, в особенности при обслуживании быстродействующего технологического оборудования, например штамповочных прессов.
Цель изобретения - повышение точности позиционирования робота за счет создания натяга в кинематической цепи манипулятора.
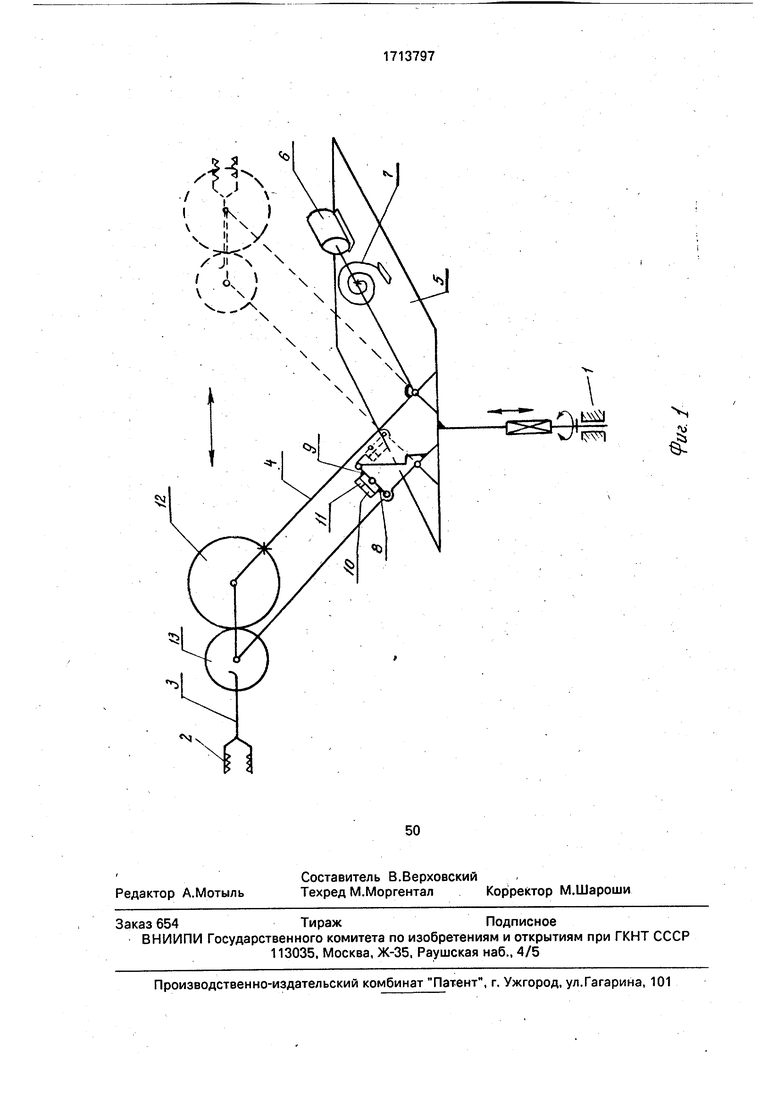
На фиг.1 показана схема робота с рекуперацией энергии, в котором кинематическая цепь привода выходного звена включает шарнирный четырехзвенник; на фиг.2 - то же, в котором кинематическая цепь привода выходного звена выполнена на основе шестизвенника.
Промышленный робот состоит из неподвижного основания 1, на котором установлен манипулятор, несущий захват 2 и составленный из шарнирно соединенных звеньев. Каждое звено кинематически связано с приводом. На фиг.1 показана кинематическая цепь привода только одного выходного звена 3 манипулятора, несущего захват 2. Она включает замкнутый шарнирный многозвенный механизм 4. В данном случае это механизм шарнирного четырехзвенника. Он своими двумя кривошипами шарнирно связан с предыдущим звеном 5 манипулятора. С одним кривошипом четырехзвенника кинематически связан привод 6 и пружинный аккумулятор 7 механической энергии. Другой кривошип установлен с возможностью взаимодействия с управляемым упором-фиксатором. В данном случае управляемый упор-фиксатор выполнен в виде двух шарнирно связанных звеньев 8 и 9, кинематически связанных соответственно с кривошипом и предыдущим звеном 5 манипулятора. В особом (вытянутом) положении звеньев вся кинематическая цепь привода звена 3 манипулятора фиксируется сопряженными элементами 10 и 11 привода, выполненного в виде электромагнита, установленными на звеньях 8 и 9. Для пере; ачи движения звену 3 в шарнирах четырехЗвенника установлена зубчатая передача, зубчатое колесо 12 которой жестко связано с кривошипом. Сопряженное зубчатое колесо (шестерня) 13 установлено с возможностью свободного вращения на оси шарнира, но жестко связано с ведомым звеном 3 манипулятора, несущим захват 2.
На фиг.2 представлена аналогичная кинематическая цепь привода звена 3 манипулятора, несущего захват 2 с тем отличием, что замкнутый шарнирный механизм 4 выполнен в виде шарнирного шестизвенника.
Для обеспечения одной степени подвижности этого шестизвенника его симметрично установленные звенья кинематически связаны между собой посредством зубчатых
передач с зубчатыми элементами 14 и 15, установленными на осях шарниров, связывающих звенья шестизненника с предыдущим звеном 5 манипулятора и зубчатыми элементами 16 и 17, установленными на
0 осях шарниров звена, несущего ведомое звено 3 манипулятора с захватом 2. Одно звено шестизвенника кинематически связано с пружинным аккумулятором 7 механической энергии, а другое - соответственно с
5 механизмом управляемого упора-фиксатора, также выполненного в виде звеньев 8 и 9..
Промышленный робот работает следующим образом.
В исходном положении на звено замкнутого шарнирного многозвенника механизма 4 действует момент, развиваемый упругим элементом 7 аккумулятора. Однако движения не происходит, поскольку второе звено, шарнирно связанное с предыдущим
5 звеном 5 манипулятора, не может повернуться вокруг оси шарнира из-за того, что упор-фиксатор, составленный из звеньев 8 и 9, находится в особом положении, зафиксированом сопряженными элементами 10
0 и 11 электромагнита.
При поступлений сигнала от системы управления (не показана) сопряженные элементы 10 и 11 Электромагнита разойдутся. Звенья 8 и 9 упора-фиксатора выйдут из
5 особого положения, а манипулятор перейдет в положение, показанное пунктиром. При этом на первой половине пути будет происходит интенсивный раэгон, поскольку потенциальная энергия пружины будет,переходить в кинетическую энергию перемещаемых масс, а на второй половине пути будет происходить торможение системы и обратный переход энергии - аккумулятор будет заряжаться. В крайнем положении,
5 показанном пунктиром, звенья 8 и 9 перейдут во второе особое положение, где и зафиксируются управляемым электромагнитом 10 и 11. На всейхдлине хода работает привод 6, подкачивая в cиcVe0 му энергию, расходуемую на трение в шарнирах и передачах.
В манипуляторе (фиг.1) за счет введения зубчатой пары 12 и 13 при повороте замкнутого шарнирного механизма П1эоизойдет обкатка шестерни 13 по колесу 12. Передаточное отношение зубчатой пары и соотношение длин ведомого звена 3 и кривошипов подобраны так, чтобы центр захвата перемещался по траектории, близкой к прямой, а крайние положения, фиксируемые упором-фиксатором, соответствовали повороту захвата на 180°. Эти характеристики удобны при обслуживании различного технологического оборудования, в частности быстродействующих прессов с направляющими колонками. В манипуляторе (фиг.2) перемещение центра захвата по прямолинейной траектории обеспечивается за счет симметрии ше-; стизвенного замкнутого шарнирного механизма и единичного передаточного отношения в зубчатых парах 14ч 15 и 16,17. Применение изобретения позволяет повысить точность позиционирования ведомого звена 3 руки за счет того, что в предлагаемых вариантах конструкции практически вся кинематическая цепь привода звена оказывается натянутой усиЛием пружины 7 аккумулятора механической энергии. Формула изобретения 1. Промышленный робот, содержащий основание, манипулятор с щарнирно соединенными звеньями, шарнирно установленный на основании, приводы, также установленные на основании и кинематически связанные со звеньями манипулятора, аккумуляторы механической энергии и управляемые упоры-фиксаторы, отличающийся тем, что, с целью повышения точности позиционирования за счет выборки зазоров в кинематической цепи манипулятора, он снабжен по крайней мере одной замыкающей кинематической цепью, шарнирно соединенной своими концами с соответствующими звеньями манипулятора и образующей совместно с ними замкнутый шарнирный многозвенный механизм, при этом одно из звеньев этого механизма кинематически связано с соответствующим аккумулятором механической энергии, а другое имеет .возможность взаимодействия с соответствующим упором-фиксатором. 2. Робот по П.1, о т л и ч а ю щ и и с я тем, что замкнутый шарнирный многозвенный механизм выполнен в виде четыоехзвенника, имеющего кривошип и шатун, а в шарнирах шатуна установлены два дополнительно введенных зубчатых колеса, образующих между собой зацепление, при этом одно из колес жестко связано с кривошипом указанного четырехзвенника, а другое - с последующим звеном манипулятора. . 3. Робот по П.1,отличающийся тем, что замкнутый шарнирный многозвенный механизм выполнен в виде шестизвенника, причем соответствующие звенья манипулятора и замыкающей кинематической цепи кинематически связаны между собой дополнительно введенными зубчаты-, ми передачами. 4. Робот по П.1, о т л и ч а ю щ и и с я тем, что каждый управляемый упор-фиксатор выполнен в виде двух шарнирно соединенных друг с другом звеньев, одно из которых шарнирно соединено с соответствующим звеном замкнутого шарнирного, многозвенного механизма, а другое - с основанием, причем оба звена зтого упорафиксатора связаны с дополнительно введенным приводом, выполненным в виде электромагнита.
V|
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| Исполнительный механизм робота | 1991 |
|
SU1798176A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| ПАУТИННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2024 |
|
RU2830218C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОРУКИЙ РОБОТ-МАНИПУЛЯТОР | 2023 |
|
RU2804700C1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| Исполнительный механизм робота | 1990 |
|
SU1722806A1 |
Изобретение относится к машиностроению и служит для автоматизации вспомогательных процессов, например загрузки и выгрузки деталей, преимущественно при обслуживании быстродействующего технологического оборудования. Цель изобретения - повышение точности позиционирования робота за счет создания натяга в кинематической цепи манипулято-ра. На звено замкнутого шарнирного многозвенного механизма 4 действует момент, развиваемый упругим элементом 1 аккумулятора механической энергии. Однако движения не происходит, поскольку второе его звено, шарнирно связанное с предыдущим звеном 5 манипулятора, зафиксировано упором-фиксатором, составленным из звеньев 8 и 9. При поступлении сигнала от системы управления шатуны выйдут из особого положения и манипулятор перейдет в положение, показанное пунктиром. При зтом звенья 8 и 9 упора-фиксатора зафиксируются приводом, выполненным в виде электромагнита. На всей длине хода работает привод 6, перемещение центра захвата 2 по прямолинейной траектории обеспечивается за счет симметрии замкнутого шести- звенного шарнирного механизма (шестизвенника) и единичного передаточного отношения в зубчатых парах 14, 15 и 16, 17, зубчатые колеса жестко связаны с соответствующими звеньями шестизвенника. 3 з.п. ф-лы, 2 ил.<^ёСО^ оVJ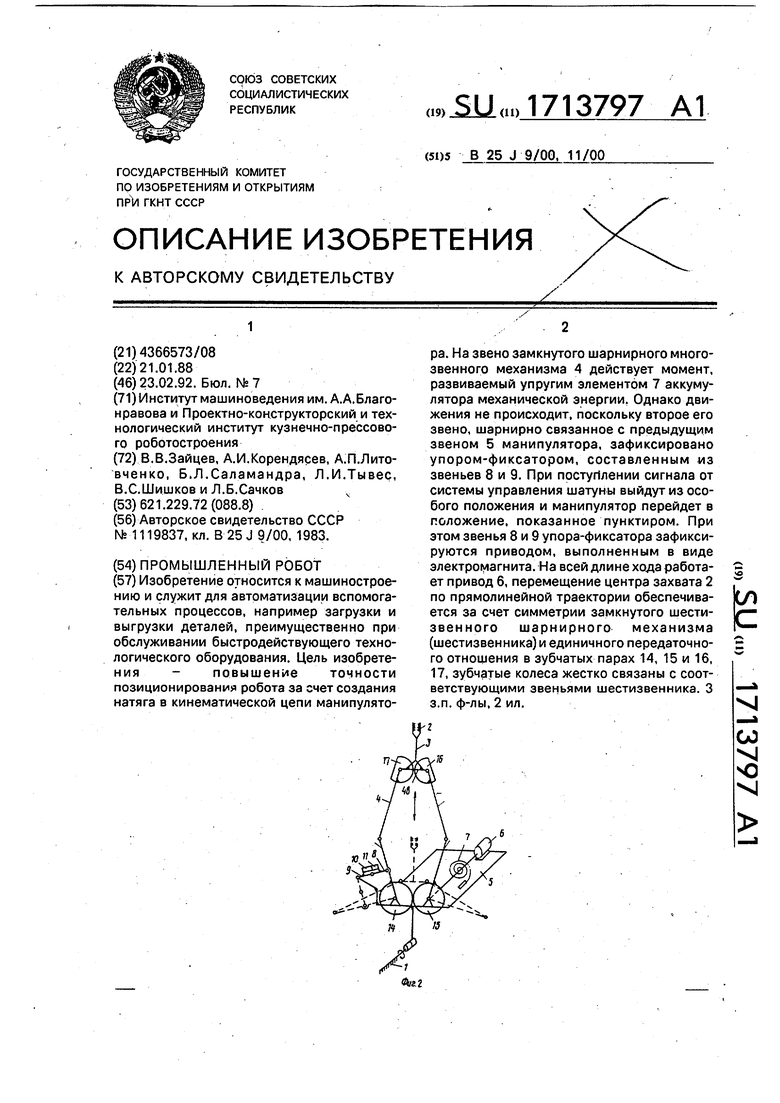
| Промышленный робот | 1983 |
|
SU1119837A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
