со со
00
;о
05
N
Изобретение относится к обработке «еталлов давлением и может быть использовано в приводах исполнительных механизмов штамповочных автоматов с выстоями в крайних положениях.
целью изобретения является повышение надежности при воздействии на Привод динамических и знакопеременных инерционных нагрузок.
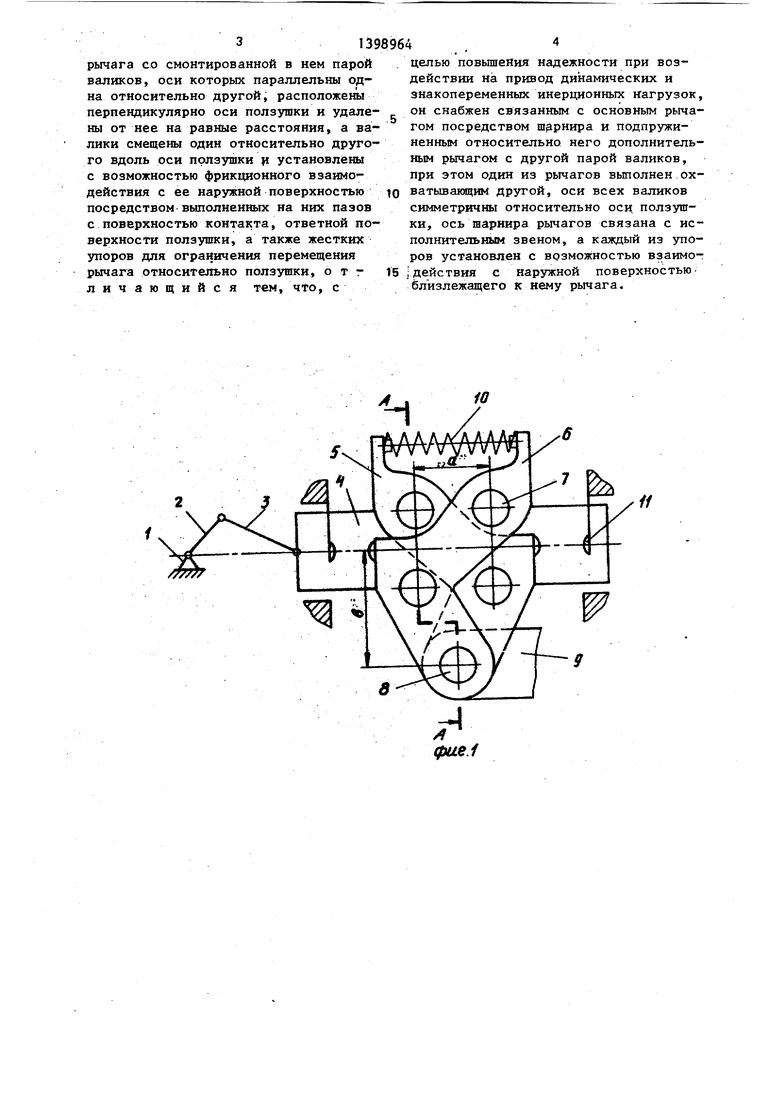
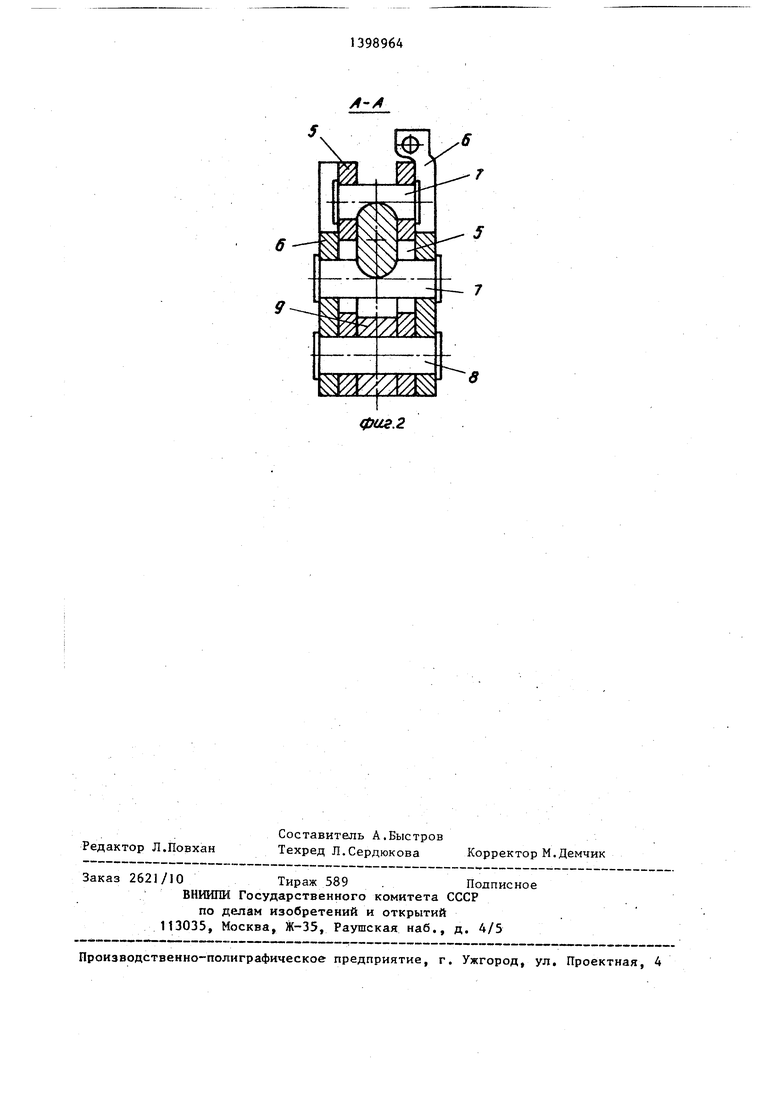
На фиг.1 приведен привод вдц сбоку; на фиг.2 - разрез А-А на фиг.1.
Привод исполнительных механизмов Штамповочного автомата содержит смон Гированньш на станине 1 кривошип 2, связанньй с узлом перемещения и выеТоя исполнительного звена шатунов 3. Узел перемещения и выстоя исполниПри взаимодействии рычага 5 с jrao- ром I1 между валиками 7 и ползуикой 4 будет проскальзывание до того мо- мента, пока ползупжа 4 не изменит
тельного звена выполнен в виде полфушки 4, .установленной на направляю- 20 направление движения на противополож1 их станины J, блока оппозитно распо- ное. Исполнительное звено 9 в этот
; юженных на ползушке 4 рычагов 5 и 6 момент, осуществляет выстой согласно
6 валиками 6, охватывающими полззшку
4. Валики 7 размещень в рычагах симцикловой диаграмме автомата.
При ходе ползущки 4 назад, когда
метрично оси ползушки, но на каждом рычаге пара валиков расположена со смещением вдоль оси ползушки на рас- стояние а. Рычаги на расстоянии в от оси ползушки посредством общей оси 8 связаны с исполнительным звеном 9. Для обеспечения работоспособности привода исполнительных меха низмов параметры а и в должны быть связаны следующим соотношением
Ь/аЭ l/(2f),
где f - коэффициент трения между ползушкой валиками 7.
Между рычагами 5 и 6 установлена Пружина 10 сжатия. На станине 1 со- осно ползушке 4 установлены упоры П
Привод исполнительных механизмов штамповочного автомата работает следующим образом.
При вращении кривошипа 2 ползушка 4 совершает возвратно-поступательные перемещения. Пружина 10 сжатия через рычаги 5 и 6 постоянно обеспечивает контакт меяоду валиками 7 и ползуш кой 4.
При ходе вперед, когда скорость ползушки 4 возрастает, на узел перемещения и выстоя исполнительного звена 9 воздействует рабочая сила и сила инерции со стороны исполнительного звена 9, направленные противоположно движению. Эти силы воспринимаются рычагом 6 и валиками 7 и ползушкой 4. Между ползушкой 4 и валиками
7 рычага 6 возникают силы трения, которые удерживают рычаг 6 на ползуш- ке 4 неподвижно.
При ходе вперед, когда скорость ползушки 4 убывает, на узел перемещения и выстоя исполнительного звена воздействует сила инерции со стороны исполнительного звена 9, направленная по движению ползушки 4. Эта сила воспринимается рычагом 5 с валиками 7 и ползушкой 4, между ползушкой 4 и валиками 7 рычага 5 возникают силы трения, которые удерживают рычаг 5 на ползушке 4 неподвижно.
При взаимодействии рычага 5 с jrao- ром I1 между валиками 7 и ползуикой 4 будет проскальзывание до того мо- мента, пока ползупжа 4 не изменит
5
цикловой диаграмме автомата.
При ходе ползущки 4 назад, когда
.
5
скорость ее движения возрастает, а сила инерции со стороны исполнительного звена 9 направлена противоположно движению ползушки 4, эту силу.воспринимает рычаг 5, который остается 0 неподвижньм относительно ползушки 4,
При ходе ползушки 4 назад, когда скорость ее движения убывает, а. сила инерции со стороны исполнительного звеНа 9 направлена по движению ползушки 4, эту силу воспринимает рычаг 6, который остается неподвижным относительно ползушки 4,
При взаимодействии рычага 6 с упором 11 между валиками 7 и ползушкой 0 будет происходить проскальзывание до того момента, пока ползушка 4 не изменит направление движения на противоположное. Исполнительное звено 9 в этот момент осуществляет выстой.
В дальнейшем цикл работы привода исполнительных механизмов штамповоч- - ного автомата повторяется. Формула изобретения
5
0
Привод исполнительных механизмов штамповочных автоматов, содержащий. смонтированные на станине кривошип, шатун, соединенный с исполнитель- .ным звеном посредством узла перемещения и выстоя последнего, вьтолненно- го в виде установленной в направляю- щик станины с возможностью возвратно- пос упательного относительно нее перемещения ползушки, охватывающего ее
рычага со смонтированной в нем парой валиков, оси которых параллельны одна относительно другой, расположешл перпендикулярно оси ползушки и удалены от нее на равные расстояния, а валики смещены один относительно другого вдоль оси ползушки р установлены с возможностью фрикционного взаимодействия с ее наружной поверхностью посредством выполненных на них пазов с поверхностью контакта, ответной поверхности ползушки, а также жестких упоров для ограничения перемещения рычага относительно ползушки, о т г ли чающийся тем, чТо, с
целью повьшеНия надежности при воздействии на привод динамических и знакопеременных инерционных нагрузок, он снабжен связанным с основным рычагом посредством шарнира и подпружиненным относительно него дополнительным рычагом с другой парой валиков, при этом один из рычагов вьшолнен охватывакяцим другой, оси всех валиков симметричш. относительно оси, ползушки, ось шарнира рычагов связана с исполнительным звеном, а каждый из упоров установлен с возможностью взаимот
jдействия с наружной поверхностью- близлежащего к нему рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод В.С.Борисова исполнительных механизмов штамповочных автоматов | 1986 |
|
SU1433614A2 |
| Привод В.С.Борисова для исполнительных механизмов штамповочных автоматов | 1985 |
|
SU1291266A1 |
| Механизм переноса заготовок | 1987 |
|
SU1547931A1 |
| ВАЛКОВАЯ (РОЛИКОВАЯ) ПОДАЧА ЗАГОТОВОК В ЗОНУ ОБРАБОТКИ | 1998 |
|
RU2158647C2 |
| Нитераскладчик | 1987 |
|
SU1416414A1 |
| Двухударный однопозиционный автомат для холодной высадки деталей стержневого типа | 1982 |
|
SU1084102A1 |
| Установка для штамповки пульсирующей нагрузкой | 1985 |
|
SU1291439A1 |
| Автомат для резки труб | 1982 |
|
SU1058724A2 |
| Механизм переноса заготовок многопозиционных холодновысадочных автоматов | 1974 |
|
SU520167A1 |
| Автомат для навивки пружин | 1976 |
|
SU565761A1 |
Изобретение относится к обработке металлов давлением и может быть использовано в приводах исполнительных механизмов штамповочных автоматов с выстоями в крайних положениях. Цель - повьшение надежности при воздействии на привод динамических и знакопеременных инерционных нагрузок. Основной деталью привода является ползушка, связанная с кривошипно-шатунным механизмом ее перемещения. Поверх ползушки расположены два соединенных общим шарниром и подпружиненных один относительно другого рычага. На каждом из рычагов перпендикулярно продольной оси ползушки со смещением вдоль нее размещена пара валиков. Своей наружной поверхностью они контактируют с наружной поверхностью ползушки. Благодаря этому при приложении усилий от исполнительного звена автомата или динамических нагрузок к связывающему рычагу шарниру происходит совместное с ползушкой движение рычагов. При упоре рычагов в соответствующие ограничители происходит выстой рычагов при перемещающейся ползушке. Наличие двух рычагов и симметричного расположения валиков обеспечивают одинаковую способность привода воспринимать усилия, приложенные к рычагам, независимо от направлений их действия. 2 ил. О)
в
фие.2
| Привод В.С.Борисова для исполнительных механизмов штамповочных автоматов | 1985 |
|
SU1291266A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
