1
Изобретение относится к грузоподъемным машинам, а именно к предохранительным устройствам стреловых кранов с телескопической стрелой со сменным рабочим оборудованием, устанав- ливаемым на оголовке стрелы или без него.
Цель изобретения - повышение надежности в работе.
На фиг.1 схематически показано место установки ограничителя грузоподъемности крана с телескопической стрелой крана (при этом позиция о соответствует варианту шарнирного закрепления преобразователя движения стрелы на стреле; - варианту жесткой установки преобразователя движения стрелы на платформе крана); на фиг.2 - преобразователь движения стрелы с имитатором геометрии стрелы на фиг.З - имитатор с поводком, вид А на фи г.2,
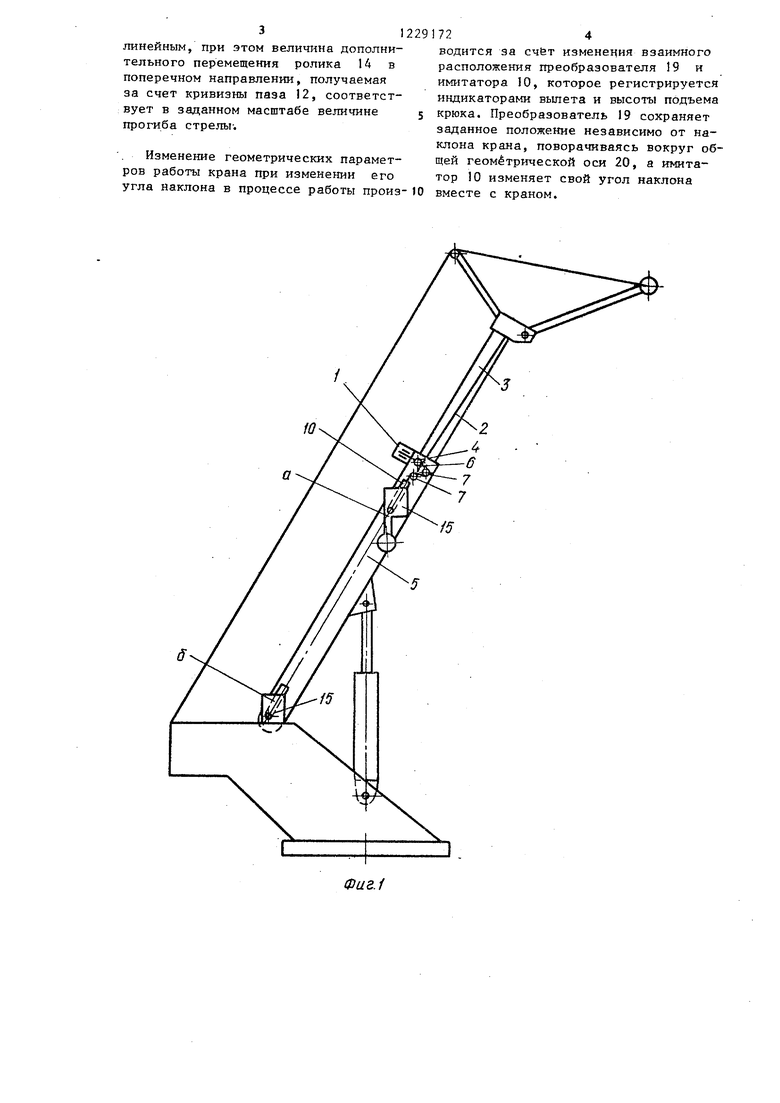
Ограничитель грузоподъемности крана с телескопической стрелой содержит ходоуменьшитель 1, выполненный в виде наклонной направляющей 2, закрепленной на боковой стенке вьщвиж- ной секции стрелы 3, по которой обкатывается ролик 4. Ролик установлен на основной секции стрелы 5 и прижат к направляющей канатом 6, который огибает блоки 7 и соединяется через тягу 8 с подпруткиненным в одну сторону основанием поводка 9 . ;Имитатор 10 геометрии стрелы име- ет корпус 11 с направляющим пазом 12, по которому при изменении длины стрелы перемещается основание поводка с закрепленным в нем поводком 13. Поводок имеет ролик 14, который связан с преобразователем 15 движегшя стрелы через каретку 16, имеющую паз 17, с которым ролик 14 находится в зацеплении. Каретка 16 перемещается по направляющим 18, установленным в корпусе преобразователя 19. Имитатор и преобразователь имеют общую геометрическую ось 20, относительно которой происходит поворот имитатора, при этом преобразователь движения всегда находится в заданной ориентации , например, с помощью маятникового Противовеса 21.
Поводок имитатора находится в кинематической связи с индикаторами 22 вылета, индикатором 23 высоты подъема крюка и индикатором 24 длины стрелы, выполненными, например, в виде
5
0
5 0 5 0
5
датчиков линейных перемещений и автономных регистрирующих приборов (не показаны).
Ограничитель грузоподъемности крана с телескопической стрелой работает следующим образом.
При сложном дв1шении стрелы ролик 14 поводка описывает кривую переменного радиуса вокруг общей геометрической оси 20, подобную кривой, описываемой оголойком стрелы или головным блоком сменного рабочего оборудования, устанавливаемого на оголовке стрелы. Индикаторы 22-24, находясь в кинематической связи с роликом 14 поводка, регистрируют вьтет, высоту подъема крюка и длину стрелы. Например, движение ролика 14 вдоль направляющего паза 12 имитатора, соответствующее изменению длины стрелы в заданном масштабе, регистрируется индикатором 24 длины стрелы. При этом происходит перемещение ролика 14 вдоль паза 17 каретки 16, а также перемещение самой каретки по направляющим 18. Указанные перемещения регистрируются индикатором 22 вылета и инд)-1катором 23 высоты подъема крюка.
Ан.апогично происходит регистра ция геометрических параметров работы крана при изменении угла наклона стрелы, когда ролик 14, перемещаясь вместе со стрелой и имитатором 10, описывает кривую постоянного радиуса вокруг общей геометрической оси 20.
При установке сменного рабочего оборудования на оголовке стрелы производится регулировка длины поводка 13 и угла его установки в соответствии с углом установки сменного рабочего органа относительно оси стрелы.
При использовании управляемых гуськов и башенно-стрелового оборудования поводок I3 синхронно поворачивается вместе со сменным рабочим оборудованием, установленным на оголовке стрелы. Привод и синхронизация поворота поводка и сменного рабочего органа (не показано) может быть осуществлена, например, с помощью сельсинов,.
Для учета изменения высоты подъема крюка и вылета стрелы от-ее прогиба под рабочей нагрузкой, основание поводка 9 перемещается по криволинейной траектории, задаваемой направляющим пазом 12, который выполнен криволинейным, при этом величина дополнительного перемещения ролика 14 в поперечном направлении, получаемая за счет кривизны паза 12, соответствует в заданном масштабе величине прогиба стрелы-.
Изменение геометрических параметров работы крана при изменении его угла наклона в процессе работы произ
291724
водится за счёт изменения взаимного расположения преобразователя 19 и имитатора 10, которое регистрируется индикаторами вылета и высоты подъема 5 крюка. Преобразователь 19 сохраняет заданное положение независимо от наклона крана, поворачиваясь вокруг общей геометрической оси 20, а имитатор 10 изменяет свой угол наклона
to вместе с краном.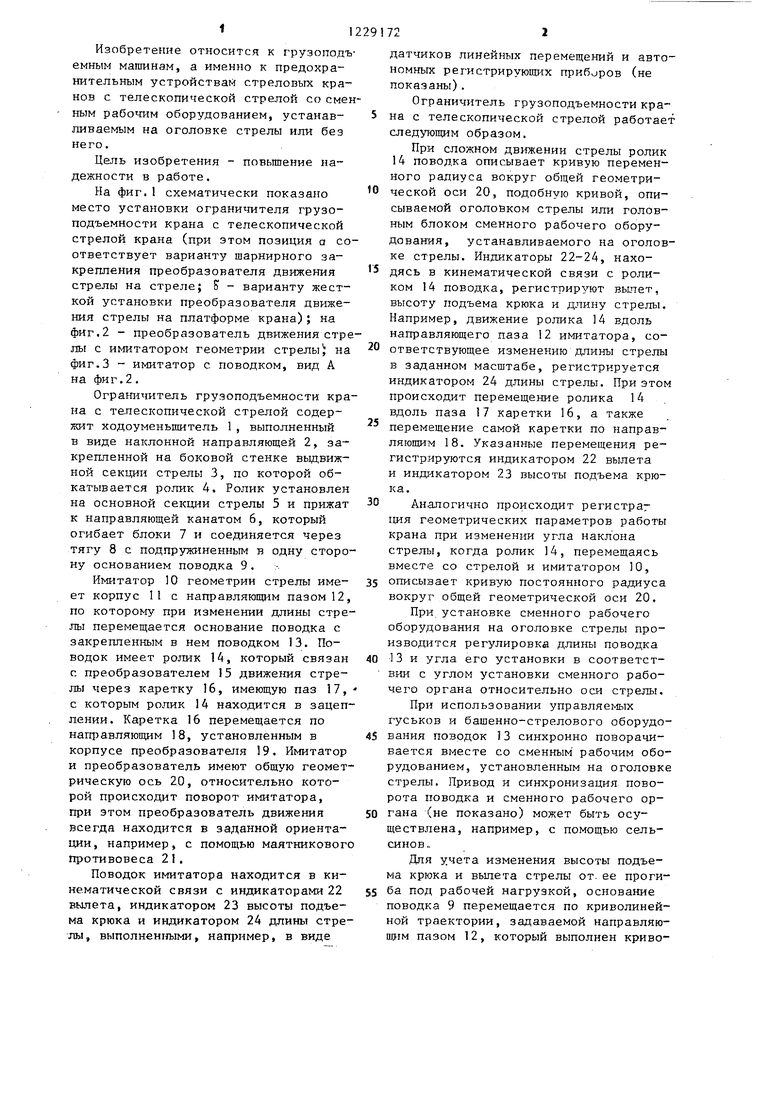
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УРАВНОВЕШИВАНИЯ ГРУЗОПОДЪЕМНОГО СТРЕЛОВОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2281242C1 |
| СПОСОБ РАБОТЫ СТРЕЛОВОГО САМОХОДНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2593179C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА СТРЕЛОВОГО ТИПА С МАНЕВРОВОЙ СТРЕЛОЙ | 2006 |
|
RU2319656C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2003 |
|
RU2262481C2 |
| Ограничитель грузоподъемности стрелового крана | 1983 |
|
SU1123986A1 |
| Ограничитель угла отклонения грузового полиспаста стрелового крана | 1975 |
|
SU550333A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫЛЕТА В УСТРОЙСТВЕ БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271986C2 |
| МОБИЛЬНЫЙ ПОДЪЕМНИК ДЛЯ МОНТАЖА, ДЕМОНТАЖА И ПЕРЕСТАНОВКИ МОСТОВЫХ КРАНОВ | 2013 |
|
RU2561177C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАГРУЗКИ НА ГРУЗОЗАХВАТНОМ ОРГАНЕ СТРЕЛОВОГО ПОДЪЕМНОГО КРАНА | 1998 |
|
RU2149820C1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ КРАНА (ВАРИАНТЫ) | 1998 |
|
RU2145568C1 |
W
а
Фиг.1
19iZ ff
,
/J
Фиг. г
Редактор П.Коссей Заказ 2414/19
Составитель Б.Дубинин Техред И,Верес
Корректор Е
Тираж 799Подписное
ВНИШта Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие,, г, Ужгород, ул. Проектная, 4
Фиг.З
Корректор Е.Рошко
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
