Изобретение относится к машиностроению и может быть использовано для ориентирования объектов в пространстве .
Целью изобретения является повышение точности юстировки.
На фиг.1 изображена схема устройства j на фиг.2 - схема привода| на фиг.З - схема установки об.ъекта.
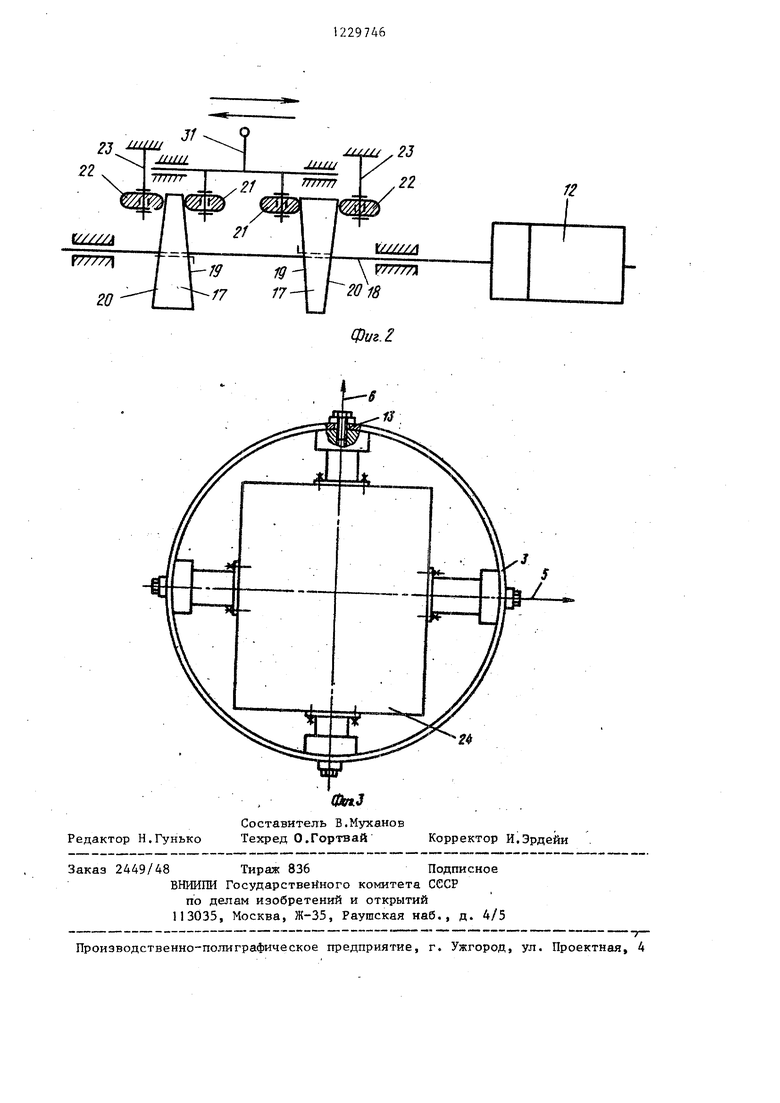
Юстировочное устройство содержит двухосный карданный подвес 1, установленный на платформе 2, обойму- объектодержатель 3, установленную в карданном подвесе 1 с возможностью поворота вокруг трех координатных осей 4-6, при -этом карданный подвес 1 снабжен двумя парами опор, которые выполнены в виде подшипниковых узлов 7, размещенных в корпусах 8, установленных в направляющих 9, расположенных вне колец 10 и П подвеса 1 с возможностью линейного перемещения, и кинематически связаны с соответствующими приводами 12, а обойма- объектодержатель 3 снабжена перфорацией 3 и размещенными на ее торцах 14 и 15 симметрично ее продольной оси регулируемыми по положению балансировочными грузами 16.
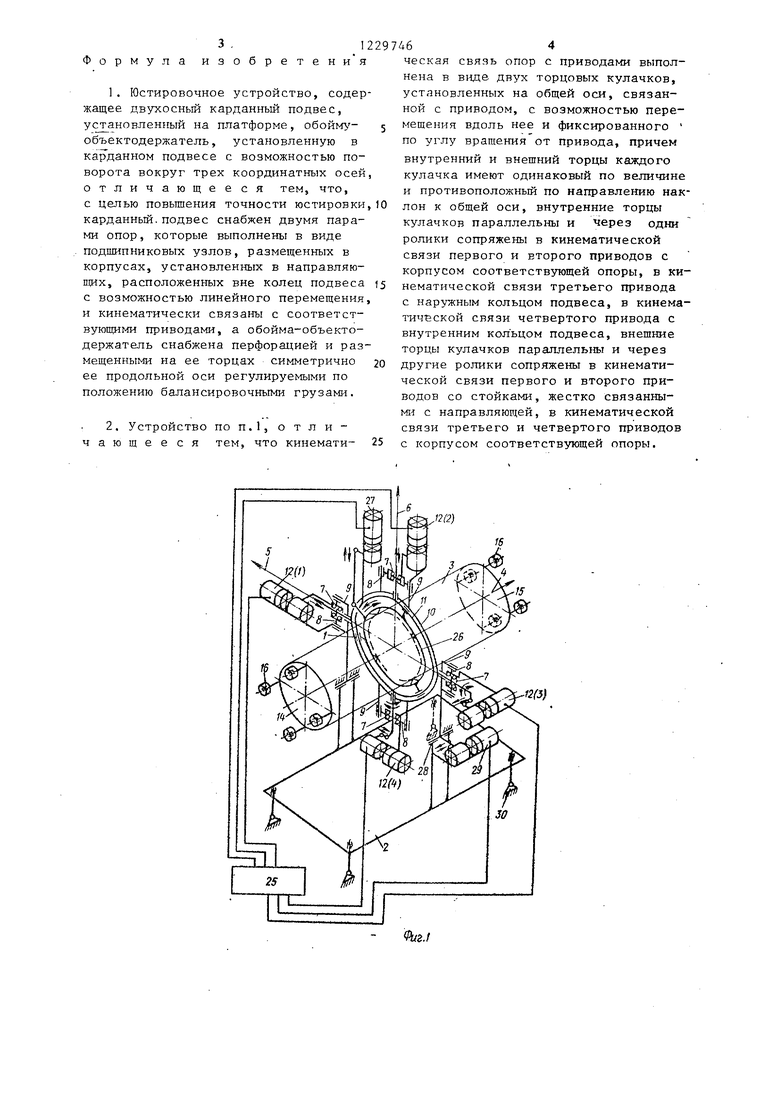
Кинематическая связь опор с приводами 12 выполнена в виде двух торцовых кулачков 17, установленных на общей оси 18, связанной с приводом 12, с возможностью перемещения вдоль нее и фиксированного его углу вращения от привода 12, причем внутренний 19 и внешний 20 торцы каждого кулачка 17 имеют одинаковый по величине и противоположный по направлению наклон к общей оси 18, внутренние торцы 19 кулачков 17 параллельны и через одни ролики 21 сопряжены в кинематической связи первого 12 (1) и второго 12 (2) приводов с корпусом 8 соответствующей опоры, в кинематической связи третьего привода 12 (З) с наружным кольцом 10 карданного подвеса 1, в кинематической связи четвертого привода 12 (4) с внутренним кольцом 11 карданного подвеса 1 , внешние торцы 20 кулачков 17 параллельны и через другие ролики 22 сопряжены в кинематической связи первого 12 (1) и второго 12 (2) приводов со стойками 23, жестко связанными с направляющей 9, а в кинематической сёязи третьего 12 (3) и четвертогр
10
15
20
25
2297462
12 (4) приводов с корпусом 8 соответствующей опоры.в
В обойме-объектодержателе 3, закреплен юстируемый объект 24, Приводы 12 связаны с блоком 25 управления .
На внутреннем кольце 11 установлено третье кольцо 26 с возмоясно- стью поворота в плоскости внутреннего кольца и связано со своим приводом 27, установленным на внутреннем кольце 11. Внешнее кольцо 10 установлено с возмолсностью перемещения вдоль.оси 4 в направляющей 28 плат- 2 и связано со своим приводом 29, Платформа 2 установлена на регу- лировоч 1ых опорах 30. Ролики 21 связаны с ползуном 31 Приводы 27 и 29 связаны с кольцаг-л-т 26 и 1 1 также с по.мощью кулачков 17 на оси 18 и ползуне 31 .
Юстировочное устройство работает следующим образом.
При необходимости смещения объекта 24 по оси 4 по команде с блока 25 управления включают привод 29, который вращает ось 18 с кулачкаш 17 Так как расстояние между внутренни- MI- 19 и внешними 20 тopцa -IИ постоянно, то при вращении кулачков 17 ползун 31 с роликами 21 и кулачка1-ш 17 смещается в сторону последне:го, уменьшение толщины которого совпадает с направлением вращения привода 29, Перемещение на карданный подвес 1 передается от ползуна 31, При достия;ении необходимой величины смещения по команде с блока 25 управления привод 29 отключают.
При повороте объекта 24 вокруг оси 4 включают привод 27 и поворачивают третье кольцо 26.
Для переме01ения вдоль оси 5 и поворота относительно ее объекта 24 включают приводы 12 (1) и 12 (3), ки- не матически связанные с внешним кольцом 10, а для перемещения вдоль оси 6 поворота относительно ее - приводы 12 (2) и 12 (4)5 кинематически связанные с внутренним кольцом 1 1 кз р- данного подвеса 1. С помощью балансировочных грузов 16, установленных на резЬ бовых стержнях, совмещают центр тяжести обоймы 3 и объекта 24 с на- ЧсШом координатнь х осей. Перемещение объекта 24 вдоль осей 4 - 6 с помощью приводов повьтает точность юстировки.
30
35
40
45
50
55
3 ,1229746
ормула изобретения
че не ус но ме по вн ку и ло ку ро св ко не с ти вн то др че во ми св с
1.Юстировочное устройство, содержащее двухосньш карданный подвес, установленный на платформе, обойм - объектодержатель, установленную в карданном подвесе с возможностью поворота вокруг трех координатных осей отличающееся тем, что,
с целью повьщ1ения точности юстировки карданный.подвес снабжен двумя парами опор, которые выполнены в виде подшипниковых узлов, размещенных в корпусах, установленных в направляющих, расположенных вне колец подвеса с возможностью линейного перемещения и кинематически связаны с соответствующими приводами, а обойма-объекто- держатель снабжена перфорацией и размещенными на ее торцах симметрично ее продольной оси регулируемыми по положению балансировочными грузами.
2.Устройство по п.1, о т л и - чающее ся тем, что кинемати-
ческая связь опор с приводами выполнена в виде двух торцовых кулачков, установленных на общей оси, связанной с приводом, с возможностью перемещения вдоль нее и фиксированного по углу вращения от привода, причем внутренний и внешний торцы каждого кулачка имеют одинаковый по величине и противоположный по направлению наклон к общей оси, внутренние торцы кулачков параллельны и через одни ролики сопряжены в кинематической связи первого и второго приводов с корпусом соответствзпощей опоры, в кинематической связи третьего привода с наружным кольцом подвеса, в кинематической связи четвертого привода с внутренним кол ьцом подвеса, внещние торцы кулачков параллельны и через другие ролики сопряжены в кинематической связи первого и второго приводов со стойками, жестко связанными с направляющей, в кинематической связи третьего и четвертого приводов с корпусом соответствующей опоры.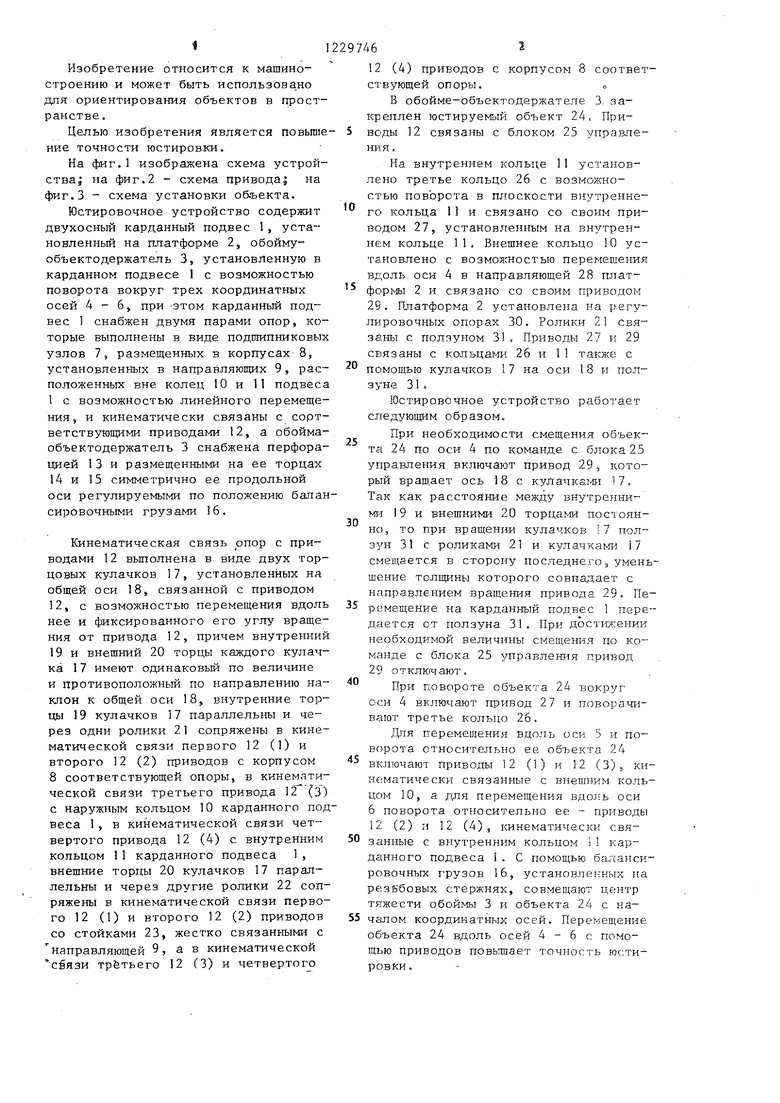
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля отклонений от прямолинейности | 1990 |
|
SU1781533A1 |
| Устройство для электрофизической обработки клапанных седел двигателей | 1976 |
|
SU657944A1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1982 |
|
SU1062542A1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1981 |
|
SU981078A1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1983 |
|
SU1132167A2 |
| АГРЕГАТ ДЛЯ БЕСКОНТАКТНОГО ИМПУЛЬСНОГО ИНЪЕКТИРОВАНИЯ ЖИДКИХ ВЕЩЕСТВ В ПОЧВУ И ИНЪЕКТОР ЖИДКИХ ВЕЩЕСТВ | 1992 |
|
RU2038731C1 |
| Индукционный компас | 1975 |
|
SU551505A1 |
| Движительно-рулевой комплекс | 1979 |
|
SU839851A1 |
| Подъемно-опускное устройство для испытаний подводного аппарата | 1983 |
|
SU1119920A1 |
| Гониометрическое устройство | 1980 |
|
SU940257A1 |
22
23 ЩШ //////
zu 23
Г2
Фиг.
г
Редактор Н.Гунько
Составитель В.Муханов Техред О.Гортвай
Заказ 2449/48 Тираж 836Подписное
ВНИИПИ ГосударствеМного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор И.Эрдейи
| Наклонно-поворотный юстировочный столик | 1980 |
|
SU905055A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
