Изобретение относится к устройствам для измельчения сыпучих продуктов, преимущественно зерна, применяется в муко- мольно-крупяной промышленности и является усовершенствованием известного устройства, описанного в авт. св. № 1060222.
Целью изобретения является повышение надежности в работе.
На фиг. 1 изображен станок со стороны боковины с приваленными вальцами.
подвески 4 и враш,ению подвижных подшипниковых опор 3. В результате произойдет привал вальца 2 к вальцу 1 и при подаче между ними продукта начнется процесс измельчения. От перемещения рычага 7 шток 17 пневмопривода 18 сожмет пружину 19, запасая тем самым в ней потенциальную энергию.
Процесс вращения рычага 7 завершится при касании его корпуса цилиндрической
рабочее положение; на фиг. 2 - то же, с ю части упора 16. При этом паз 15 защелки
л ..JQ соединится с зубчатой частью упора
16 и зафиксирует вальцы 1 и 2 в приваленном положении, чем способствует энергия изогнутой пружины 13.
Надежноть фиксации паза 15 с упором
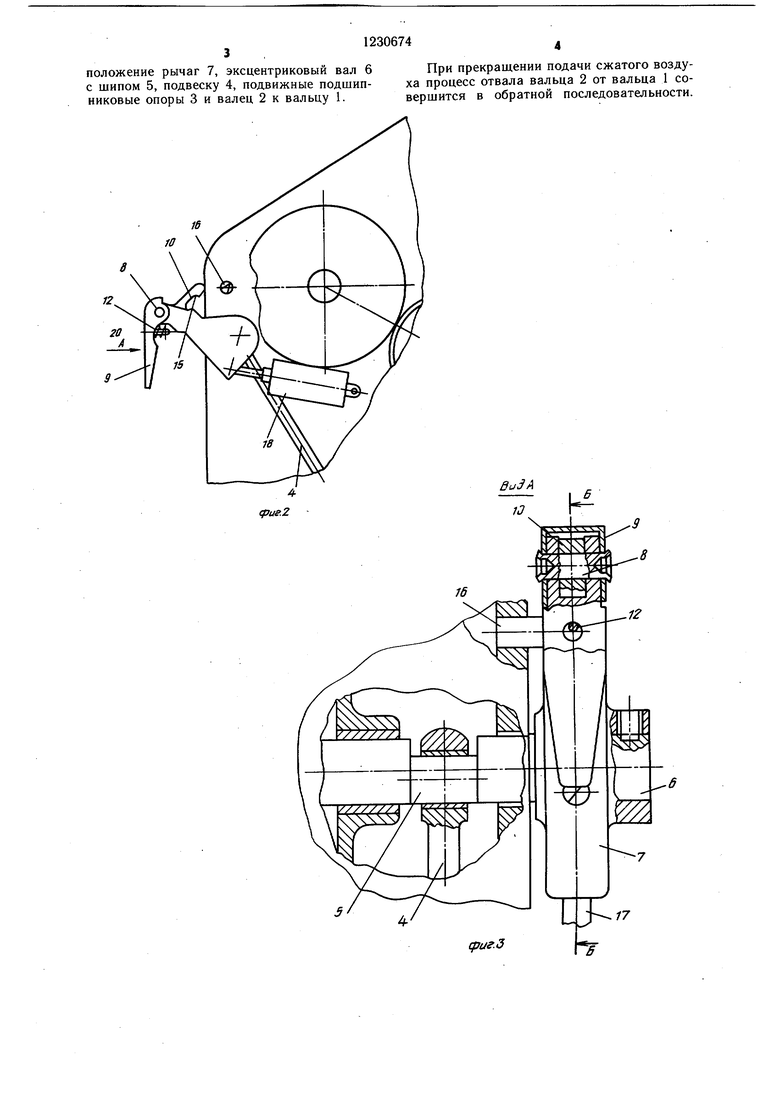
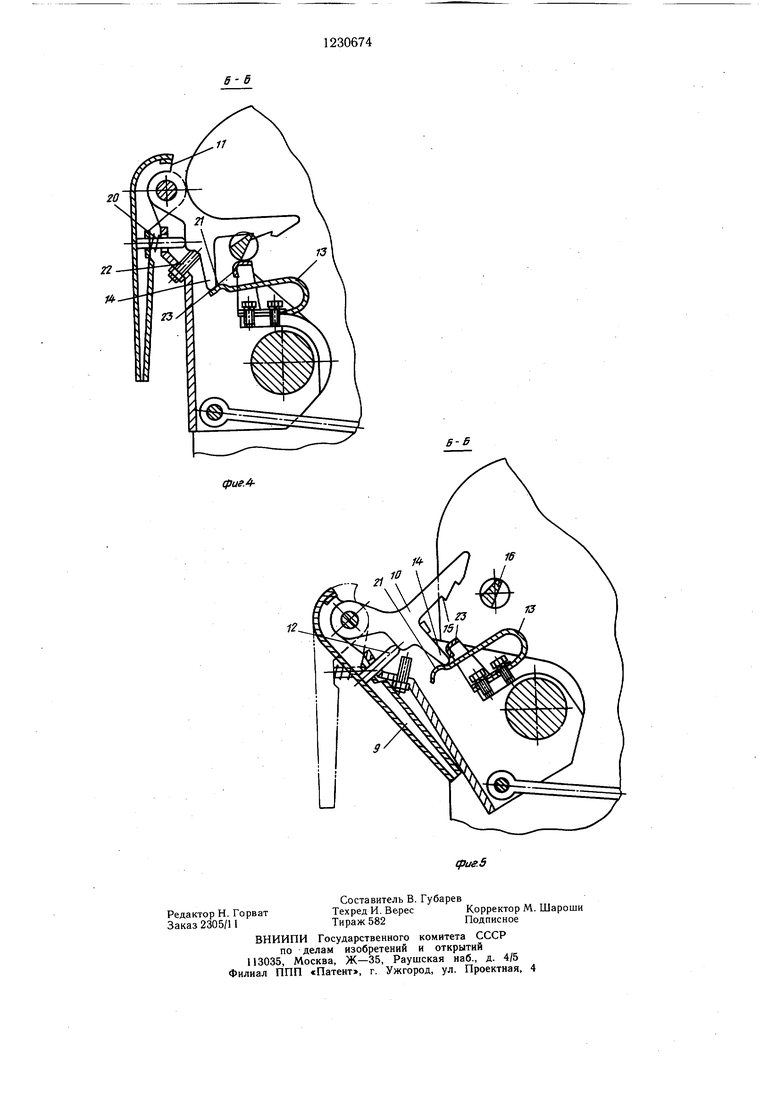
она начинает свободно вращаться относительно оси 8. В конце своего вращения кинетическая энергия рукоятки 9 начнет восприниматься пружиной 20, которая заставит лицевую поверхность рукоятки 9 занять веротваленными вальцами, холостой ход; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3, рабочее положение вальцов, рукоятки и защелки в ручном управлении; на фиг. 5 - то же, холостой ход вальцов,
положение рукоятки и защелки в момент пе- 15 16 обеспечивается воздействием упора 22 на ревода в режим автоматического управле- упор 14 защелки 10, устраняя тем самым ния.влияние накопления погрешностей изготовРабочими органами станка являются ления элементов деталей станка, вальцы 1 и 2. Последний закреплен в подвиж-После привала вальцов 1 и 2 рукоятку
ные подшипниковые опоры 3, подвещенные Q отпускают и под действием своей массы посредством подвесок 4 к шипам 5 экс-
центрикового вала 6, на котором винтовым соединением жестко закреплен рычаг 7. В корпусе рычага 7 на оси 8 свободно закреплена рукоятка 9 и защелка 10.
Рукоятка 9 содержит упоры 11 и 12 для 25 тикальное положение и не допустить воз- ограничения вращения защелки 10 в двух действия упора 12 на упор 14. направлениях.Для отвала вальцов 1 и 2 вращают руПружина изгиба 13 посредством винтов коятку 9 против часовой стрелки, преодо- закреплена в корпусе рычага 7 и ее свобод- левая сопротивление пружины 20. При этом ный конец контактирует с упором 14, яв- под воздействием упора 12 на упор 14 за- ляющимся частью защелки 10. Последняя 30 10 будет вращаться в том же на- содержит также паз 15 для соединения с правлении и освоб рдит паз 15 от зацепле- упором 16. являющимся частью станины станка.
К нижней части корпуса рычага 7 щарнирно закреплен шток 17 качающегося пнев- , .-.., .
мопривода одностороннего действия 18 с пом 5, подвеску 4, подвижные подщипнико- возвратной пружиной 19.вые опоры 3, т. е. произойдет отвал вальца
В зоне упора 12 к рукоятке 9 укреплена пружина сжатия 20, у которой длина в свободном состоянии соответствует вертикальния с упором 16. В результате под воздействием сжатой пружины 19 шток 17 пневмопривода 18 переместит в исходное положение рычаг 7, эксцентриковый вал 6 с ши2 от вальца 1.
Под возде йствием пружины 20 в отваленном положении лицевая поверхность рукоятному положению лицевой поверхности рукоят-40 ки 9 вновь будет располагаться в верти- ки 9.кальном положении, занимая минимальное
Свободный конец пружины изгиба 13 выполнен с фиксирующим элементом 21, по отношению к которому УГОЛ поворота защелки
10 ограничен упорами 22 и 23, причем упор 22 выполнен регулируемой длины.45
расстояние от оси эксцентрикового вала 6 и от станины станка, определяя при этом его габарит по щирине.
Для перевода станка в режим автоматического управления вращением рукоятки 9 против часовой стрелки под воздействием упора 12 перемещают в том же направлении защелку 10 до тех пор, пока ее упор 14 не
Для перевода станка в режим автоматического управления вращением рукоятки 9 против часовой стрелки под воздействием упора 12 перемещают в том же направлении защелку 10 до тех пор, пока ее упор 14 не
Работа станка начинается с сообщения вращения вальцам 1 и 2.
При ручном управлении рукоятку 9 вращают по часовой стрелке до контакта расположится справа от фиксирующего эле- упора 11 с корпусом рычага 7, вращая при мента 21 пружины 13 и не достигнет ка- этом защелку 10 в том же направлении. При эТом упор 14 располагается слева от фиксирующего элемента 21 пружины 13.
При дальнейщем вращении в том же направлении рукоятки 9 вместе с ней будут вра- 55 начнется с подачи сжатого воздуха в рабо- щаться корпус рычага 7, ось 8, защелка 10, чую полость пневмопривода 18. эксцентриковый вал 6 с шипом 5. ВращениеПри этом, преодолевая сопротивление
последнего приведет к перемещению вверх пружины 19, шток 17 переместит в рабочее
пружины 13 и не достигнет касания упора 23, обеспечивая тем самым гарантированный зазор между пазом 15 и упором 16.
Работа станка в автоматическом режиме
подвески 4 и враш,ению подвижных подшипниковых опор 3. В результате произойдет привал вальца 2 к вальцу 1 и при подаче между ними продукта начнется процесс измельчения. От перемещения рычага 7 шток 17 пневмопривода 18 сожмет пружину 19, запасая тем самым в ней потенциальную энергию.
Процесс вращения рычага 7 завершится при касании его корпуса цилиндрической
части упора 16. При этом паз 15 защелки
она начинает свободно вращаться относительно оси 8. В конце своего вращения кинетическая энергия рукоятки 9 начнет восприниматься пружиной 20, которая заставит лицевую поверхность рукоятки 9 занять вер отпускают и под действием своей массы
тикальное положение и не допустить воз- действия упора 12 на упор 14. Для отвала вальцов 1 и 2 вращают рукоятку 9 против часовой стрелки, преодо- левая сопротивление пружины 20. При этом под воздействием упора 12 на упор 14 за- 10 будет вращаться в том же на- правлении и освоб рдит паз 15 от зацепле-
, .-.., .
пом 5, подвеску 4, подвижные подщипнико- вые опоры 3, т. е. произойдет отвал вальца
ния с упором 16. В результате под воздействием сжатой пружины 19 шток 17 пневмопривода 18 переместит в исходное положение рычаг 7, эксцентриковый вал 6 с шипом 5, подвеску 4, подвижные подщипнико- вые опоры 3, т. е. произойдет отвал вальца
2 от вальца 1.
Под возде йствием пружины 20 в отваленном положении лицевая поверхность рукоятки 9 вновь будет располагаться в верти- кальном положении, занимая минимальное
расстояние от оси эксцентрикового вала 6 и от станины станка, определяя при этом его габарит по щирине.
Для перевода станка в режим автоматического управления вращением рукоятки 9 против часовой стрелки под воздействием упора 12 перемещают в том же направлении защелку 10 до тех пор, пока ее упор 14 не
расположится справа от фиксирующего эле- мента 21 пружины 13 и не достигнет ка-
расположится справа от фиксирующего эле- мента 21 пружины 13 и не достигнет ка-
начнется с подачи сжатого воздуха в рабо- чую полость пневмопривода 18. При этом, преодолевая сопротивление
пружины 13 и не достигнет касания упора 23, обеспечивая тем самым гарантированный зазор между пазом 15 и упором 16.
Работа станка в автоматическом режиме
положение рычаг 7, эксцентриковый вал 6 с шипом 5, подвеску 4, подвижные подшипниковые опоры 3 и валец 2 к вальцу 1.
При прекращении подачи сжатого воздуха процесс отвала вальца 2 от вальца 1 совершится в обратной последовательности.
16
fO
ipue.Z
17
(раг.З
в-б
фие.4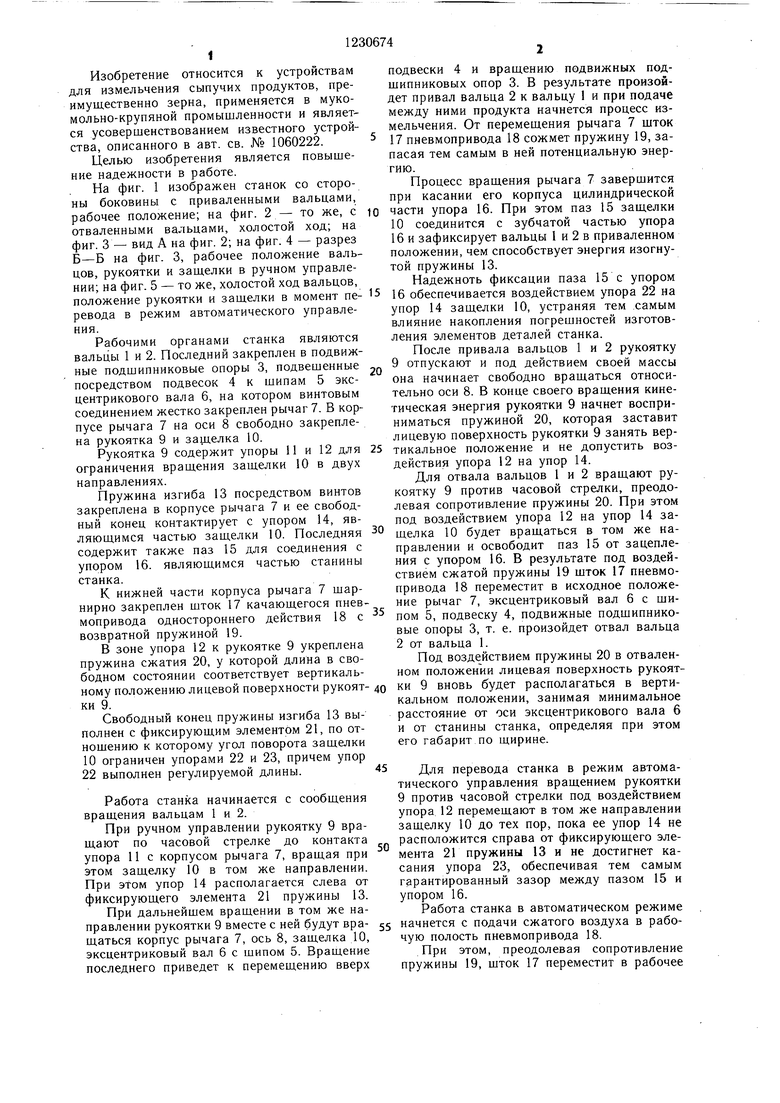
| название | год | авторы | номер документа |
|---|---|---|---|
| Вальцовый станок | 1982 |
|
SU1060222A1 |
| Автомат для управления вальцовым станком | 1974 |
|
SU545377A2 |
| Автомат для управления вальцовым станком | 1977 |
|
SU628946A1 |
| МЕХАНИЗМ ПРИВАЛА-ОТВАЛА ПОДВИЖНОГО МЕЛЮЩЕГО ВАЛЬЦА ВАЛЬЦОВОГО СТАНКА | 1999 |
|
RU2162739C2 |
| Вальцовый станок | 1981 |
|
SU961750A1 |
| ВАЛЬЦОВЫЙ СТАНОК | 1966 |
|
SU185680A1 |
| Вальцовый станок | 1976 |
|
SU552996A1 |
| МУКОМОЛЬНЫЙ ВАЛЬЦОВЫЙ СТАНОК | 1996 |
|
RU2115477C1 |
| МУКОМОЛЬНЫЙ ВАЛЬЦОВЫЙ СТАНОК | 1997 |
|
RU2115478C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАБОЧЕГО ЗАЗОРА МЕЖДУ ВАЛЬЦАМИ МЕЛЬНИЧНОГО ВАЛЬЦОВОГО СТАНКА | 2003 |
|
RU2273519C2 |

Составитель В. Губарев
Техред И. ВересКорректор М. Шароши
Тираж 582Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патеит, г. Ужгород, ул. Проектная, 4
| Вальцовый станок | 1982 |
|
SU1060222A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
