Изобретение относится к подъемно- транспортному машиностроению и может быть использовано в тормозах шахтных подъемных машин.
Цель изобретения - повышение надежности гидравлического привода.
На чертеже приведена схема гидравлического привода тормоза подъемной машины.
Гидравлический привод тормоза подъ-10 вательно соединенные с фильтрами 21,
25
емкой машины содержит подключенные к тормозным цилиндрам 1 регулятор 2 давления и устройство 3 предохранительного торможения, имеющее общую сливную линию 4. Регулятор 2 давления 15 включает в себя трехпозиционный распределитель 5, вход которого сообщен с тормозными цилиндрами 1. Устройство предохранительного торможения 3 включает в себя двухпозиционный распреде- 20 литель 6 с подпружиненным золотником и полостью управления. Входы двухпо- зиционного распределителя 6 устройства предохранительного торможения сообщены с напорной линией 7 и с тормозными цилиндрами 1.
Устройство 3 предохранительного торможения содержит электромеханический преобразователь 8 с элементами управления типа сопло-заслонка, вход которого сообщен с напорной линией 7, а один из выходов - с полостью управления двухпозиционного распределителя 6. Гидравлический привод тормоза подъемной машины содержит датчик 9 направления движения и остановки подъемной машины, включающий в себя кинематически связанный с валом подъемной машины насос 10, сообщенный с баком 11, предохранительный клапан 12, Q дроссель 13, обратный клапан 14.
I
Гидравлический привод содержит также дополнительный двухпозиционный распределитель 15с подпружиненным с одной стороны золотником и с полос- 5 тяни 16 и 17 управления и дроссельный клапан 18. Полость 16 управления, в которой размещена пружина золотника, сообщена с входам электромеханическо30
35
обратными 22 и предохранительными 2 клапанами, подают жидкость под давл нием в напорную линию 7 и через дву позиционный распределитель 6 устрой ства 3 предохранительного торможения - в гидролинию 24. Регулятор 2 давления содержит электромеханический преобразователь 25 с элементом управления типа сопло-заслонка.
Гидравлический привод тормоза по емной машины работает следующим обр зом.
При включении насосов 20 жидкост под давлением через фильтры 21, обратные клапаны 22 и напорную линию поступает к устройству 3 предохрани тельного торможения. После подачи н пряжения в обмотку электромеханичес кого преобразователя В на его выходе возникает давление, под действие которого золотник двухпозиционного распределителя 6 передвигается в вер нее положение и соединяет напорную линию 7 и гидролинию 24, создавая тем самым возможность растормаживан подъемной машины регулятором 2 давл ния .
При нормальной работе подъемной машины под действием давления и уси лия пружины в полости 16 управления золотник дополнительного двухпозици онного распределителя 15 находится в нижнем положении, обеспечивая сво бодный слив жидкости из тормозных цилиндров 1 при затормаживании регу лятором 2 давления.
Сраба.тывание предохранительного тормоза сопровождается обесточивани катушек электромеханических преобра
го преобразователя 8 устройства предо-50 зователей 8 и 25 и падением давле- хранительного торможения, а полость 17 управления - с насосом 10 датчика 9 направления движения и остановки подъемной машины. Выходы основного двухния в полостях управления двухпозиц онного распределителя 6 устройства предохранительного торможения, в по лости 16 управления дополнительного
позиционного распределителя 6 устрой- 55 двухпозиционного распределителя 15
ства 3 предохранительного торможения и трехпозиционного распределителя 5 регулятора 2 давления сообщены
с баком посредством общей сливной линии 4, в которой установлен дополнительный распределитель 15, и через дополнительную сливную линию 19, в ко- торой установлен дроссельный клапан 18. Дополнительная сливная линия 19 сообщена с общей сливной линией 4 перед дополнительным двухпозиционным распределителем 15. Насосы 20, последо
обратными 22 и предохранительными 23 клапанами, подают жидкость под давлением в напорную линию 7 и через двухпозиционный распределитель 6 устройства 3 предохранительного торможения - в гидролинию 24. Регулятор 2 давления содержит электромеханический преобразователь 25 с элементом управления типа сопло-заслонка.
Гидравлический привод тормоза подъемной машины работает следующим образом.
При включении насосов 20 жидкость под давлением через фильтры 21, обратные клапаны 22 и напорную линию 7 поступает к устройству 3 предохранительного торможения. После подачи напряжения в обмотку электромеханического преобразователя В на его выходе возникает давление, под действием которого золотник двухпозиционного распределителя 6 передвигается в верхнее положение и соединяет напорную линию 7 и гидролинию 24, создавая тем самым возможность растормаживанйя подъемной машины регулятором 2 давления .
При нормальной работе подъемной машины под действием давления и усилия пружины в полости 16 управления золотник дополнительного двухпозиционного распределителя 15 находится в нижнем положении, обеспечивая свободный слив жидкости из тормозных цилиндров 1 при затормаживании регулятором 2 давления.
Сраба.тывание предохранительного тормоза сопровождается обесточиванием катушек электромеханических преобразователей 8 и 25 и падением давле-
ния в полостях управления двухпозиционного распределителя 6 устройства 3 предохранительного торможения, в полости 16 управления дополнительного
и в полости управления трехпозиционного распределителя 5 регулятора 2 цавления.
Золотники двухпозиционного распределителя 6 и трехпозиционного распределителя 5 передвигаются соответственно в нижнее и верхнее положения, соединяя тормозные цилиндры 1 с баком через дополнит.ельный двухпозиционньШ распределитель 15 и дроссельный клапан 18.
Если срабатывание предохранительного тормоза происходит при подъеме груза, то под действием давления в полости 17 управления, создаваемого датчиком направления движения и остановки подъемной машины, золотник дополнительного двухпозиционного распре-; 15 направления движения и остановки подъделителя 15 передвигается вверх и перекрывает общую сливную линию 4. Так как дроссельный клапан 18 настраивается на небольшой расход, то при подъеме груза давление в тормозных 20 цилиндрах падает, а тормозное усилие возрастает медленно. При постепенном возрастании тормозного усилия исключается набегание подъемного сосуда на канат и обеспечивается регламенти-25
емной машины, а также в полости 17 управления избыточное давление отсут- |Ствует. Поэтому золотник дополнительного двухпозиционного распределителя 15 в процессе предохранительного торможения находится в нижнем положении, создавая возможность для- быстрого слива имеющейся в тормозных цилиндрах 1 жидкости и интенсивного нарастания тормозного усилия.
рованное правилами безопасности замедление подъемной машины.
После снижения скорости подъемной машины падает давление в полости t7 управления и золотник дополнительн о- го двухпозиционного распределителя 15 под действием усилий сжатой пружины полости 16 управления передвигается вьше, обеспечивая быстрый слив оставшейся в тормозных цилиндрах 1 жидкости и создание полного тормозного момента. В период спуска груза насос 10 вращается в противоположную сторону и на выходе датчика
емной машины, а также в полости 17 управления избыточное давление отсут- |Ствует. Поэтому золотник дополнительного двухпозиционного распределителя 15 в процессе предохранительного торможения находится в нижнем положении, создавая возможность для- быстрого слива имеющейся в тормозных цилиндрах 1 жидкости и интенсивного нарастания тормозного усилия.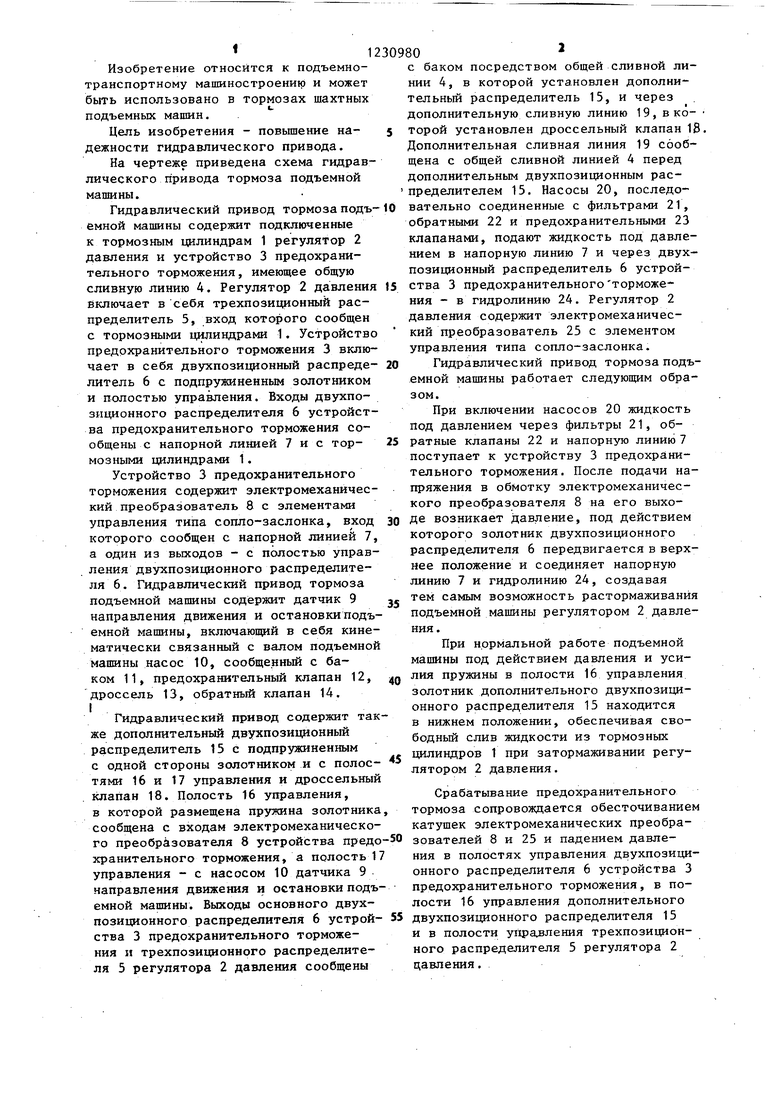
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод тормоза подъемной машины | 1984 |
|
SU1203015A1 |
| Система управления пружинно-гидравлическим приводом тормоза шахтных подъемных машин | 1979 |
|
SU787327A1 |
| Система управления пружинно-гидравлическимпРиВОдОМ ТОРМОзА шАХТНОй пОд'ЕМНОй МАшиНы | 1978 |
|
SU800122A1 |
| Гидрообъемная трансмиссия транспортного средства с рекуперативным приводом | 1978 |
|
SU779105A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА ПЛАТФОРМЫ СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2014 |
|
RU2583820C1 |
| Гидрообъемный привод транспортного средства | 1987 |
|
SU1414665A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| ГИДРОСИСТЕМА МОБИЛЬНОЙ МАШИНЫ | 2004 |
|
RU2276237C2 |
| Система управления тормозом шахтной подъемной машины | 1983 |
|
SU1180350A2 |
Составитель О.Кузьмина Редактор И.Касарда Техред О.Гортвай Корректор Е.Сирохман
Заказ 2515/26 Тираж 799 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Система управления пружинно-гидравлическим приводом тормоза шахтных подъемных машин | 1979 |
|
SU787327A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
