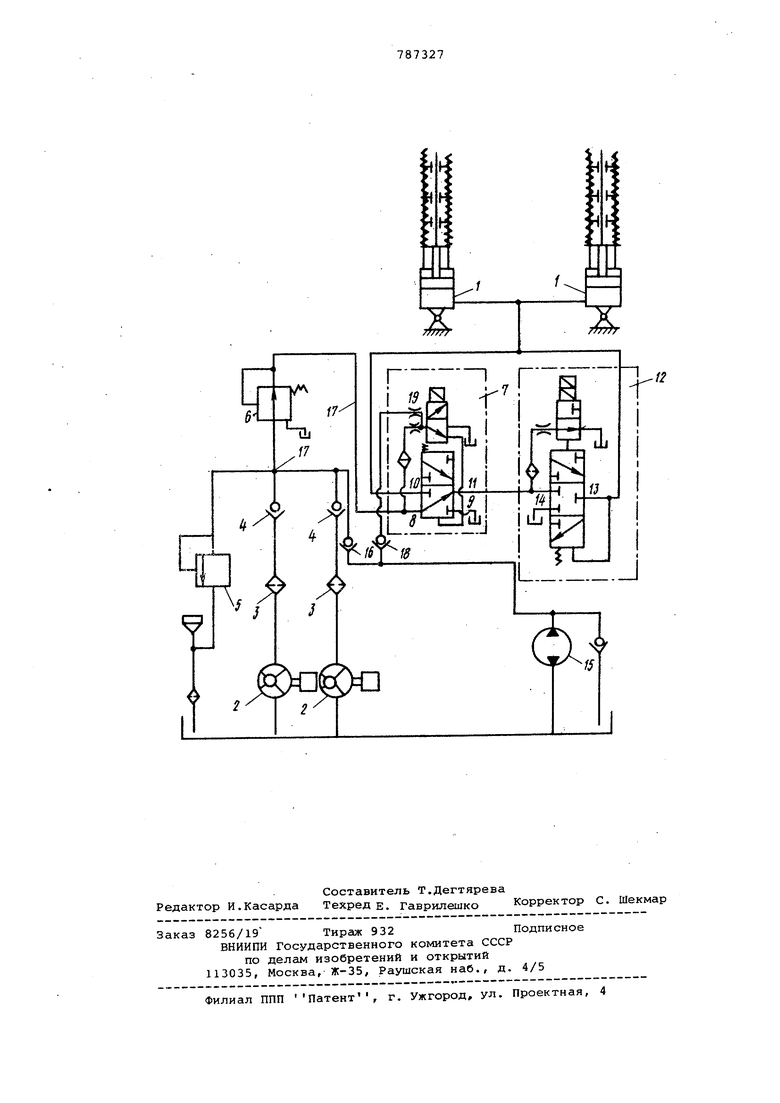
Изобретение относится к гидроаппаратуре управления и может быть исполь зовано в тормозных системах шахтных подъемных машин. Известна, система управления пружинно-гидравлическим приводом тормоза шахтных подъемных машин, содержащая тормозные цилиндры, маслонасосы, на выходе которых установлены фильтры, предохранительный, переливной и; обратные клапаны, распределитель предохранительного торможения, полости которого соединены с напорной и сливной магистралями и тормозными цилиндрами, регулятор .давления, полости которого соединены с тормозными цилиндр ми, сливной магистралью и распредели телем предохранительного торможения, датчик направления движения и остано ки подъемной машины, выполненный в виде насоса 1 . Недостаток известной системы - ни кая нсщежность. Цель изобретения - повышение надежности системы. , Поставленная цель достигается тем что выход датчика направления и оста новки машины подключен посредством дополнительного обратного клапана и дросселя к распределителю предохрани тельного торможения и к напорной магистрали гидросистемы. На чертеже схематически изображена система управления. Система управления пружинно-гидраВ лическим приводом тормоза шахтных подъемных машин включает в себя тормозные цилиндры 1,маслонасосы 2 постоянной производительности,на выходах которых установлены фильтры 3,обрат- . ные кпапаны 4,предохранительный 5 и переливной 6 клапаны,устройство 7 предохранительного торможения, полости В и 9 которого подключены к напорной и сливной магистралям, а полости 10 и 11 - к тормозным цилиндрам и напорной полости регулятора 12 давления с полостями 13 и 14, подключенными к тормозным цилиндрам и к сливной магистрали, датчик направления движения и остановки подъемной машины в виде пристыкованного к валу механического реле оборотов насоса 15, выход кото- . рого через обратный клапан 16 подключен к напорной магистрали 17,а через обратный клапан 18 и дроссель 19 - к камере управления устройства 7 предохранительного торможения. При включении двигателей маслона- сосов 2 в напорной магистрали 17 появляется давление. После подачи напряжения на обмотку электромеханического преобразователя устройства 7 предохранительного торможения его золотник передвигается в верхнее положение (см. чертеж), соединяя напорную полость регулятора 12 давления с напорной магистралью 17, подготавливая тем самым возможность растормаживания подъемной машины с помощью регулятора 12 давления.
При вращении органа навивки подъемной машины в сторону, соответствующую подъему груза, насос 15 подает часть жидкости под давлением через обратный клапан 18 и дроссель 19 в камеру управления устройства 7 предохранительного торможения. В начале процесса предохранительного торможения одновременно обесточиваются ка-. тушка электромеханического преобразователя устройства 7 предохранительного торможения и обе регулятора 12 давления. Давление в камере управления регулятора 12 снижается до величины, обусловленной настройкой второго (дополнительного) электромеханического преобразователя. За счет изменения сил, действующих на торцы золотника, он передвигается вверх и соединяет тормозные цилиндры со сливной магистралью. После снижения давления в тормозных цилиндрах до величины, равной давлению в камере управления регулятора 12, его золотник возвращается в нейтральное положение, отсекая тормозные цилиндры от сливной магистрали. Таким образом, первая ступень при предохранительном торможении при подъеме груза обеспечивается регулятором 12 давления и изменяется с помощью его второго электромеханического преобразователя.
Под действием тормозного усилия первой ступени предохранительного томоза и статического усилия скорость подъемной машины уменьшается. По мер снижения скорости уменьшается подача насоса 15, а также давление в камере управления устройства 7 предохранительного торможения.При определенной скорости подъемной машины (подаче насоса 15) давление в камере управлени устройства 7 предохранительного торможения снижается до такой величины, что усилие от действия пружины на торец золотника становится больше усилия, создаваемого давлением камеры управления на другой его торец, и золотник передвигается вниз. Жидкост из тормозных цилиндров 1 поступает ч рез устройство 7 предохранительного торможения в слив. Одновременно осуществляется слив жидкости из тормозных цилиндров через регулятор 12 давления. Золотник регулятора 12 под де ствием давления обратной связи на ни
НИИ его торец передвигается из нейтрального в верхнее положение. На другом торце золотника давление отсутствует, так как золотник устройства 7 предохранительного торможения в е нижнем положении отсекает питание камеры управления регулятора 12 давления,
-Таким образом,наложение второй ступени предохранительного торможения Q при подъеме груза осуществляется в зависимости от скорости подъемной машины с помощью устройства предохрани- . тельного торможения и регулятора давления.
Система управления пружинно-гид5 равлическим приводом тормоза сохраняет свою работоспособность при полном снятии напряжения с подъема за счет подпитки напорной гидромагистрали 17 через обратный клапан 16 насосом 15.
В процессе предохранительного торможения при спуске груза давление на выходе датчика направления и остановки подъемной машины отсутствует, а
5 .жидкость из тормозных цилиндров 1 выпускается одновременно через регулятор 12 давления и устройство 7 предохранительного торможения. Следовательно, во время спуска при предохрани-тельном торможении происходит наложение полного тормозного момента.
Формула изобретения
5 Система управления пружинно-гидравлическим приводом тормоза шахтных подъемных машин, содержащая тормоз. ные цилиндры, маслонасосы, на выходе которых установлены фильтры, предохранительный, переливной и обратные клапаны,распределитель предохранительного торможения, полости которого соединены с напорной и сливной магистралями и тормозными цилиндрами, регулятор давления, полости которого 5 соединены с тормозными цилиндрами,
сливной магистралью и распределителем предохранительного торможения, датчик направления движения и остановки подъемной машины, выполненный в виде 0 насоса, отличающаяся тем, что, с целью повышения надежности системы, выход датчика направления и остановки машины подключен посредством дополнительного обратного клапана и дросселя к распределителю предохранительного торможения и к напорной магистрали гидросистемы.
Источники информации, принятые во внимание при экспертизе 1, Димашко А.Д. и др. Шахтные
электрические лебедки и подъемные машины. Справочник. М., Недра, 1973, с. 59.
,
ш
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод тормоза подъемной машины | 1984 |
|
SU1203015A1 |
| Гидравлический привод тормоза подъемной машины | 1984 |
|
SU1230980A1 |
| Система управления пружинно-гидравлическимпРиВОдОМ ТОРМОзА шАХТНОй пОд'ЕМНОй МАшиНы | 1978 |
|
SU800122A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Гидравлический тормоз шахтной подъемной машины | 1988 |
|
SU1654207A1 |
| Тормоз подъемной машины | 1988 |
|
SU1516459A1 |
| Система управления тормозом шахтной подъемной машины | 1983 |
|
SU1180350A2 |
| Система управления тормозом шахтной подъемной машины | 1978 |
|
SU747806A1 |
| Гидравлический дисковый тормоз шахтной подъемной машины | 1985 |
|
SU1306899A2 |
| Устройство для управления рабочим торможением подъемной машины | 1983 |
|
SU1142404A1 |