1 -1 Изобретение относится к аппаратуре управления, используемой преимущественно в тормозных системах шахтных подъемных установок. Цель изобретения - повышение безопасности эксплуатации подъемной установки. На чертеже приведена принципиальная гидравлическая схема системы управления тормозом шахтной подъемной машины. Система управления тормозом шахтной подъемной машины включает в себя привод тормоза 1 в виде тормозных цилиндров 2 и пружинных блоков 3, источник 4 давления рабочей жидкости, состоящий из насосов 5,связанных с электродвигателями, фильтров 6, обратных клапанов 7, предохранительного 8 и разгрузочного 9 клапанов и устройства 10 для заливки рабо.чей жидкости с фильтром 11, гидробак 12, устройство 13 предохранитель ного торможения в виде двухпозиционного четырехлинейного гидрораспределителя 14 дискретного действия с электромагнитной головкой 15 управления, регулятор 16 давления в ви де трехпозиционного гидрораспределителя 17 непрерывного действия с электромеханической головкой 18 управления, датчик 19 направления движения и остановки подъемной .машины, выполненный в виде нереверсивного насоса 20, вал которого соединен с быстроходным валом редуктора подъемной машины (не показана) посредством муфты 21 свободного хода, а на выходе установлены параллельно вклю-ченные предохранительный клапан 22 и нерегулируемьй дроссель 23, аккумулятор 24 давления, включенный на выходе источника 4 давления рабочей жидкости, датчик местоположения подъ емного сосуда в стволе 25, выполненный в виде профилированного, диска 26, высота профиля которого зависит от местоположения подъемного сосуда в стволе, кинематически связанного с валом подъемой машины посредством редуктора 27, формирователь 28 сигналов задания в виде подпружиненного двухпозиционного гидрораспре делителя 29 дискретного действия, камера управления которого соединена с выходом датчика направления движе ния и остановки подъемной машины 19 нерегулируемого дросселя 30 питания 02 и регулируемого дросселя 31 слива в виде поворотного двухлинейного двухпозиционного гидрораспределителя непрерывного действия, золотник которого жестко соединен с рычагом 32, на конце которого установлен подшипник 33, прилегающий своей внешней обоймой .к поверхности профилированного диска 26 датчика местоположения сосуда в стволе 25, устройство 34 регулирования величины тормозного усилия, установленное на сливном канале устройства 13 предохранительного торможения, выполненное в виде двух параллельно включенных двухпозиционных двухлинейных гидрораспределителей 35 и 36 дискретного действия, камеры управления которых соединены с выходом формирователя 28 сигналов задания, а камеры обратной связи - с выходом датчика 37 замедления подъемной машины, состоящего из нерегулируемого дросселя 38 питания, регулируемого дросселя 39 слива, выполненного в виде подпружиненного двухлинейного трехпозиционного гидрораспределителя непрерывного действия, золотник которого- жестко соединен с чувствительным элементом 40. Чувствительный элемент 40 и датчик 36 замедления кинематически связаны с быстроходным валом редуктора подъемной машины (не показана). Система работает следующим об-. разом. При включении одного из насосов 5 (второй обычно реверсивньй) в систему подается рабочая жидкость под давлением, определяемым настройкой предохранительного 8 и разгрузочного 9 клапанов, и аккумулятор 24 давления заряжается. I Зарядка предохранительного тормоза осуществляется подачей напряжения на обмотку гидроэлектромеханической головки 15 управления устройства 13 предохранительного торможения . При этом золотник гидрораспределителя 14 переставляется в верхнее положение и соединяет распределительную полость регулятора 16 с подпоршневь1ми полостями тормозных цилиндров 2. При подаче напряжения на обмотку гидроэлектромеханической головки 18 управления регулятора 16 давления золотник гидрораспределителя 17 переставляется в нижнее положение. соединяя распределительную полость нагнетательной полостью. Рабочая жи кость через регулятор 16 давления и устройство 13 предохранительного торможения поступает в подпоршневые полости тормозных цилиндров 2. Порш ни последних поднимаются, дополнительно сжимая пружинные блоки 3, и подъемная машина растормаживается. При движении подъемной машины в сторону, соответствующую подъему гр за, датчик направления движения и остановки подъемной машины 19 подает жидкость в камеру управления гидрораспределителя 29 формирователя 28 сигналов задания. При скорости вращения насоса 20, соответствующей порогу срабатывания датчик 19, давление на его выходе достигает давления переключения распределителя 29, золотник последнего пере ставляется в верхнее положение,вклю чая в работу формирователь 18 сигна лов задания. В формирователь сигналов задания включены два дросселя: один - нерегулируемый дроссель 30 питания,другой - регулируемый дроссель 31 слива. Соотношение проходных сечений этих дросселей определяет давление жидкости на выходе формирователя 28 сигналов задания. Так как на дроссель 31 действует профилированный диск 26, высота профиля которого зависит от местоположения подъем ного сосуда в стволе, то, очевидно, давление на выходе формирователя 28 сигналов задания также зависит от местоположения подъемного сосуда в стволе. При предохранительном торможении обесточиваются обмотки головок 15 управления устройства 13 предохрани тельного торможения регулятора 16 давления. В этом случае золотник устройства 13 переставляется в нижнее положение, отсекая распределительную полость регулятора 16 давления от подпоршневых полостей тормодных цилиндров 2 и соединяет последние с устройством 34 регулирования величины тормозного усилия. Золотники гидрораспределителей 35 и 36 устройства 34 регулирования величины тормозного усилия при расторможенной машине под действием давления на выходе датчика 37 замедления находятся в положении Открыто. Поэтому жидкость из тормозных цилиндров 2 через устройство 13 предохранительного торможения и устройство 34 регулирования величины тормозного усилия сливается в маслобак 12 и давление в подпоршневых полостях уменьшается, т.е. к барабану подъемной машины прикладывается тормозной момент и подъемная установка начинает замедляться. На выходе датчика 37 замедления устанавливается дзвление, величина которого пропортдиональна заме,цлению подъемной машины и определяется соотношением проходньк сечс1 ий нерегулируемого дросселя 38 питания и регулируемого дросселя 39 слива, на который воздействует чувствительный элемент 40. В момент, когда давление на выходе датчика 37 замедления и давление на выходе формирователя 28 сигналов задания сравниваются, т.е. замедление подъемной машины будет равно заданному, золотники гидрораспределителей 35 и 36 переставляются в положение Закрыто и отсекают подпоршневые полости тормозных цилиндров 2 от слива. Подъемная установка затормаживается с постоянным замедлением. Если в процессе торможения происходит изменение параметров тормоза (например, попадание масла на тормозной обод, что влечет за собой уменьшение коэффициента трения между ободом и тормозными колодками) замедление подъемной установки уменьшается, значит увеличивается давление на выходе датчика 37 замедления, при этом золотники гидрораспределителей 35 и 36 перемещаются в положение Открыто, соединяя подпоршневые полости тормозных цилиндров 2 со сливом, тем самым увеличивая тормозной момент до тех пор, пока замедление подъемной установки не будет равно заданному, после чего золотники гидрораспределителей 35 и 36 вновь занимают положение закрыто и слив жидкости из тормозных цилиндров 2 прекращается. При торможении подъемной машины скорость вращения ее органа навивки и кинематически связанного с ним насоса 20 датчика направления движения и остановки подъемной машины 19 уменьшается. При достижении скорости, соответствующей порогу чув- ствительности датчика (4% от максимальной скорости подъема), давление на его выходе становится меньше давления переключения гидрораспределителя 29 формирователя 28 сигналов задания. Золотник гидрораспределителя 29 переставляется в нижнее закрытое положение и отключает формирователь 28 сигналов задания, т.е. давление на его выходе и в камерах управления гидрораспределителей 35 и 36 устройства 34 регулирования величины тормозного усилия отсутствует . Под действием давления в камерах обратной связи гидрораспределителей 35 и 36 золотники последних переставляются в положение Открыто и вся оставшаяся в подпоршневых полостях тормозных цилиндров 2 жидкость сливается в маслобак 12,т.е. налагается полное тормозное усилие. При спуске груза давление на выходе датчика 19 направления движения
и остановки подъемной машины отсутствует, золотник гидрораспределителя 29 находится в нижнем положении,
давление на выходе формирователя 28 сигналов задания отсутствует, золотники гидрораспределителей 35 и 36 устройства 34 регулирования величины тормозного усилия под действием
давления в камерах обратной связи находятся в положении Открыто. В случае предохранительного торможения вся рабочая жидкость из тормозных цилиндров 2 сливается в гидробак 12, т.е. происходит наложение полного тормозного усилия.
Нормальная работа системы управления тормозом в случае полного обесточивания подъема обеспечивается аккумулятором 24 давления, который является резервным источником давления рабочей жидкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Система управления тормозом шахтной подъемной машины | 1985 |
|
SU1306898A2 |
| Система управления пружинно-гидравлическимпРиВОдОМ ТОРМОзА шАХТНОй пОд'ЕМНОй МАшиНы | 1978 |
|
SU800122A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Система управления тормозом шахтной подъемной машины | 1978 |
|
SU747806A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1008150A1 |
| Устройство для регулирования направления движения и остановки подъемной машины | 1983 |
|
SU1142429A1 |
| Устройство для определения движения и остановки подъемной машины | 1982 |
|
SU1177252A1 |
| Гидравлический привод тормоза подъемной машины | 1984 |
|
SU1230980A1 |
СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗОМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ по авт.св. f 948869, отличающаяся тем, что, с целью повьшения безопасности эксплуатации подъенной установки, она снабжена датчиком замедления подъемной майины, выход которого соединен с двухпозиционным гидрораспределителем Дискретного действия устройства регулирования величины тормозного усилия, при этом чувстйительный элемент датчика соединен с валом шахтной подъемной машины. г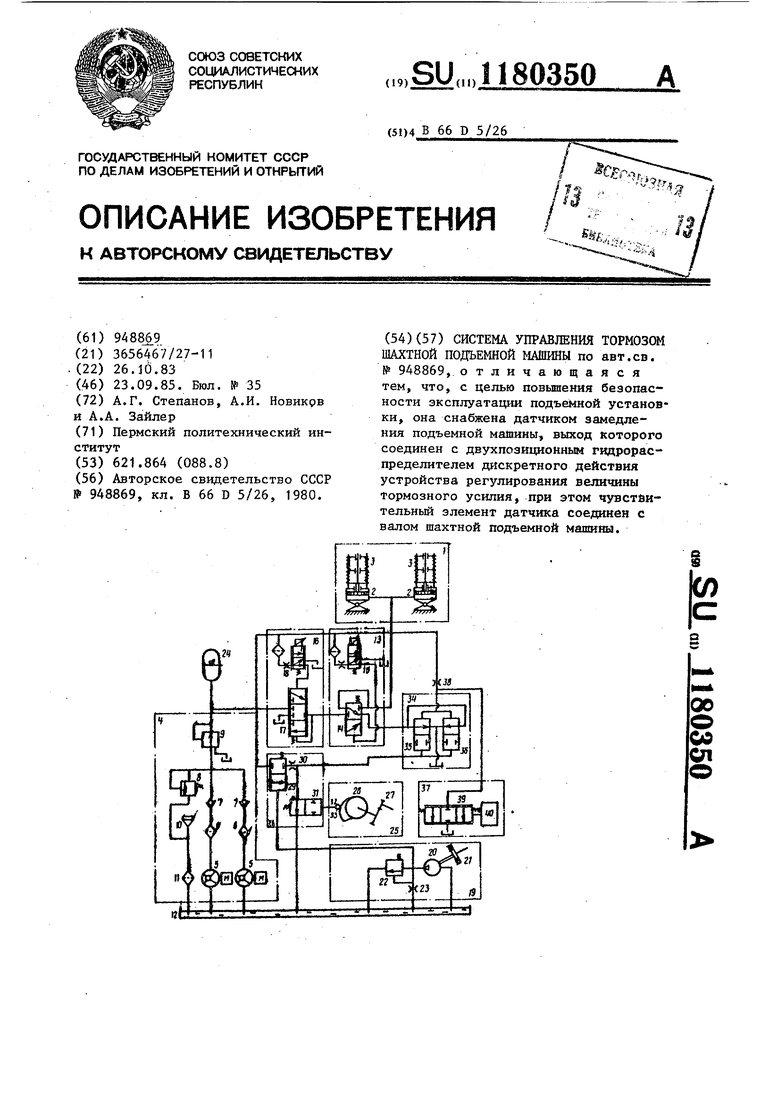
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
